






电流模式控制
电流模式控制(CMC)是开关电源中广泛使用的一种控制策略,其核心思想是通过内环电流反馈和外环电压反馈共同调节占空比。相比电压模式控制,CMC具有更快的动态响应和更好的稳定性,但也存在一些固有缺点。
原理
以buck为例,架构如下
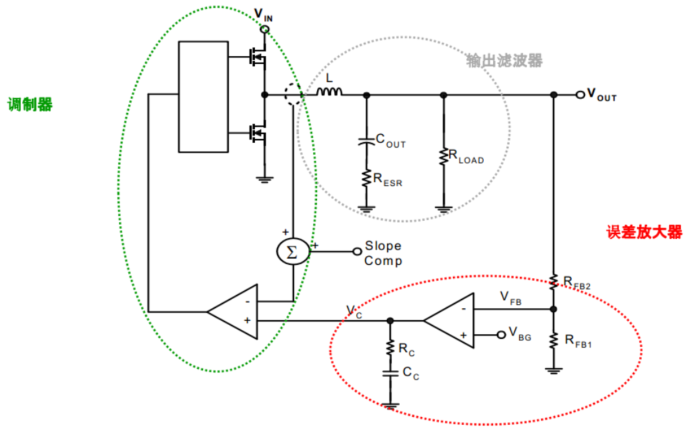
控制结构(双环结构)
- 内环:电流环,实时检测电感电流或开关管电流,与电流参考值(由外环生成)比较,生成PWM占空比。
- 外环:电压环,检测输出电压,通过误差放大器生成电流参考信号(通常为补偿后的电压误差信号)。
工作流程
- 输出电压采样:通过分压电阻得到VFB,与基准电压比较,经过EA输出Vc(这个就是电流环的参考信号)。
- 电感电流检测:这里就有些区分了,可以检测峰值,平均值,谷底,但原理都是检测电感电流。
- 峰值电流模式:检测开关管,如高边MOSFET导通时的电流峰值。
- 平均电流模式:通过低通滤波或积分电路获取电感电流平均值。
- 谷底电流模式:在低边MOSFET导通期间或电感电流下降阶段,检测电流的最小值。
- PWM调制:电流检测信号Vcs与Vc比较,决定占空比D;当Vcs达到Vc,关闭开关管,实现逐周期限流。
优缺点
优点
- 更快的动态响应:电流内环直接控制电感电流,对负载瞬变响应更快。电压外环仅需调节电流参考,带宽要求较低。
- 自动限流保护:逐周期电流检测,天然防止过流,无需额外保护电路。
- 更好的环路稳定性:电流环将LC滤波器的二阶系统降为一阶,简化补偿,通常只需Type II补偿。
- 输入电压扰动抑制:电流环自动抵消Vin变化的影响,无需前馈补偿。
缺点
- 次谐波振荡(占空比 > 50% 时):需斜率补偿(Slope Compensation),否则可能不稳定。
- 电流检测噪声敏感:电流采样信号易受开关噪声干扰,需谨慎布局和滤波。
- 轻载稳定性问题:在DCM下,电流环失效,需特殊处理,如强制进入CCM或跳频模式。
- 复杂性和成本:需高精度电流检测电路,如低边MOSFET Rdson、专用电流传感器。
应用场景
CMC适用于以下应用:
- 高动态负载场合:如CPU/GPU供电,快速变化的电流需求。
- 宽输入电压范围:如汽车电子的12V-24V系统、工业电源。
- 需要精确限流的应用:如电池充电器、LED驱动。
- 多相并联电源:CMC易于均流,如服务器VRM。
设计注意事项
电流检测设计
以峰值电流举例,举例说明不同采样方式及优缺点:
-
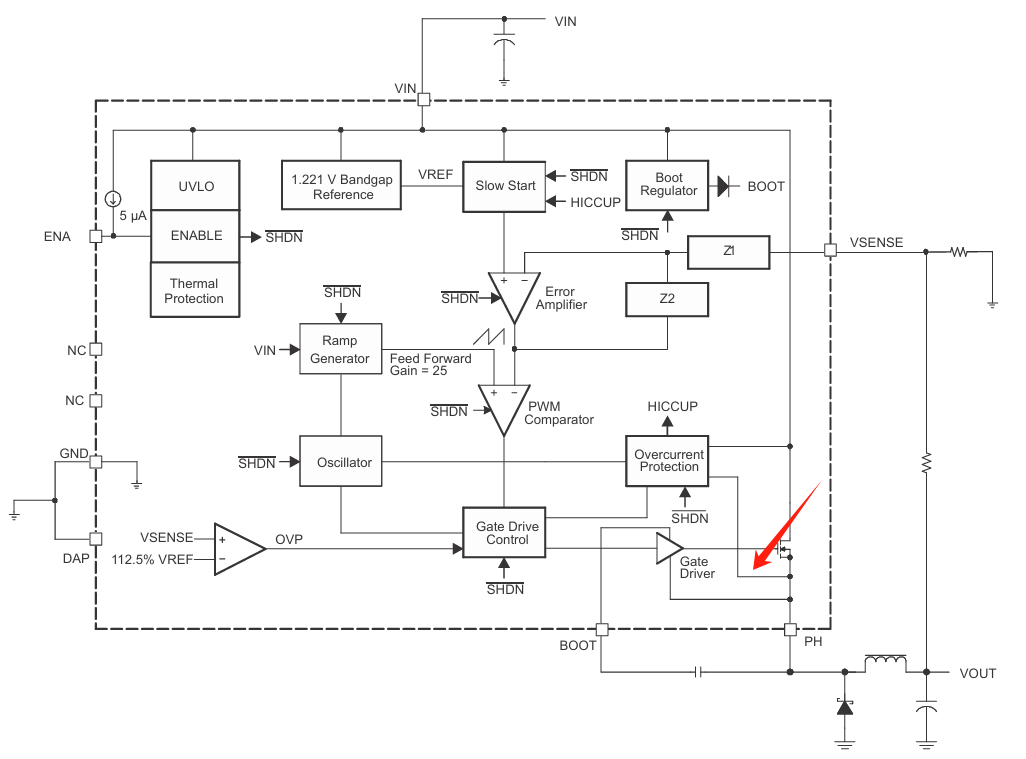
低边MOS的Rdson:以下管mos的Rdson作为电流采样元件,Vds=IL*Rdson,这个电压被放大后与内部参考做比较。其特点是成本低,但温漂大,要校准,如TI的TPS543。典型应用于工业电源、嵌入式系统(12V→3.3V/5V转换)。
-
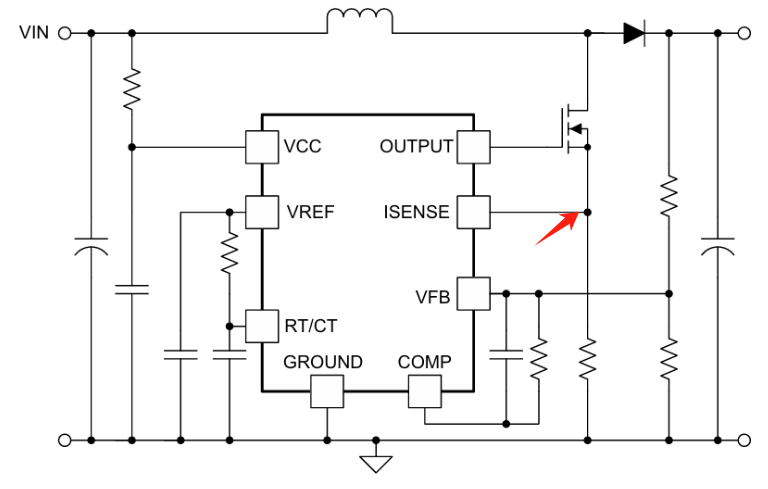
外部分流电阻:通过检测开关管S极与GND之间的电流采样电阻电压,其特点是精度高,但增加损耗。典型应用flyback、forward、boost等。
-
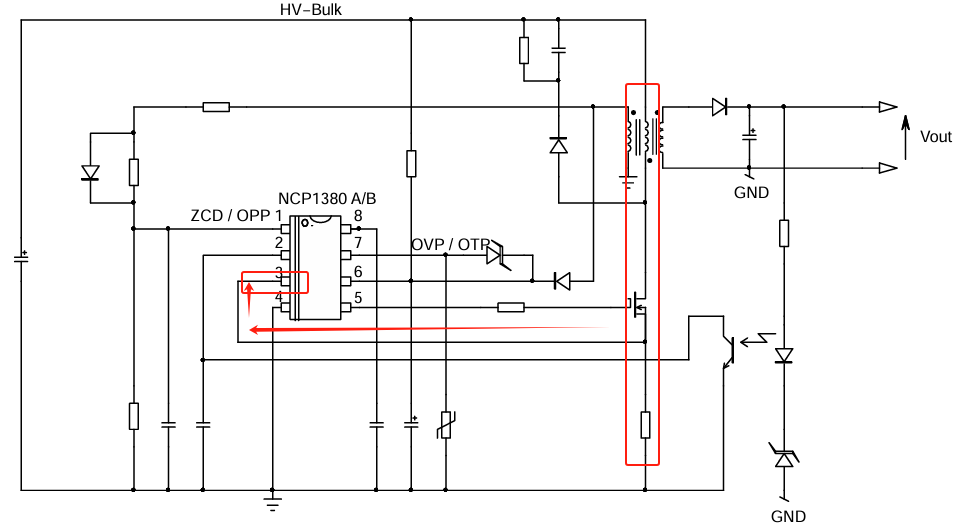
电流互感器:这个比较少,成本高,适用于高频大电流,如LLC谐振,常用于服务器电源,TV电源等大功率。我找了NCP1380,跟上面的分流电阻一样,将CT次级电流转为电压信号,内部比较器用这个电压信号实现OCP、ZCD。
PCB布局要点:
- 电流检测路径尽量短,避免开关噪声耦合。
- 使用差分走线减少共模干扰。
次谐波震荡
Slope Compensation,可以看到上面的框图中有个Slope Comp,这个是什么呢?这里得提到另外一个概念,次谐波震荡,这个问题可以说是CMC特有的。次谐波震荡表现为:电感电流或输出电压在开关频率的1/2、1/3等分频点处出现周期性波动,导致系统失控。 有点玄乎,我们来看看几个关键点。
什么是电感电流扰动?比如系统中出现了负载突变,使得电感电流突然增大。
在什么工作模式容易出现?峰值电流检测的CMC。
这个时候的频率是固定的吗?对的,用峰值电流检测,产生的信号通过与FB的电压信号对比,产生固定的PWM调制信号。
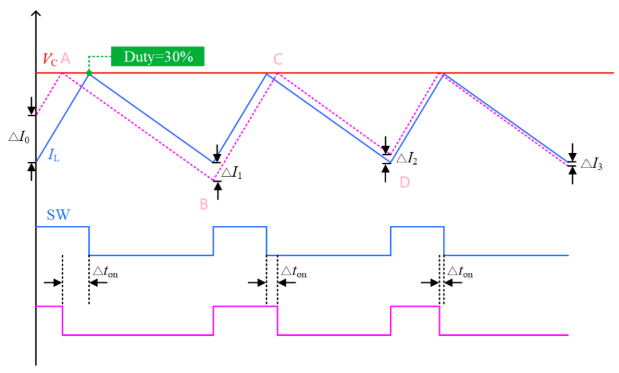
好了,开始分析:在低占空比,小于0.5。如下图蓝色部分是正常的,红色是出现扰动后的,出现了ΔI,注意现在我们是峰值电流检测,当电感电流IL达到A点时,(相较于没有扰动,是提前达到Vc的),MOS关闭,进入续流,因为是提前达到Vc的,所以放电的周期就变大了,而放电的斜率是不变的,所以B点下移,再次导通,因为B点低,达到C点的时间就拉长,C点也就滞后了,同理,经过几个周期后,越来越靠近稳定波形,是能够自行调控使得系统稳定的。
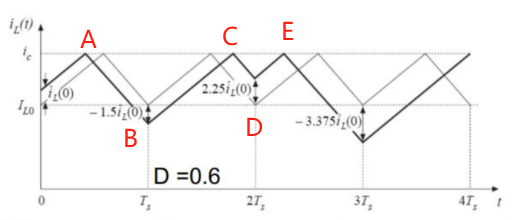
当占空比大(大于0.5),如下图,电感电流上移,先到了A点,开始放电,等下一个导通,使得B点下移(这个很容易理解吧?先到先放电,放电时间长了,斜率一样的,肯定先放的值低),这个时候收到了系统指令,充电mos打开,上升斜率是一样的,值低的需要花更长的时间到达Vc,后面发现,因为占空比大,放电时间没有了,很短,还没放一点点又收到系统指令要充电了,这就导致了占空比一会大一会小,从而形成次谐波震荡。BC长CD短,DE短EF又长。
怎么去解决这个问题呢?要是有种办法,可以使得Vc的值可以变化,不是固定的,先到的,放电时间长一点,后到的放电时间短一点,是不是跟占空比小的情况类似,那么需要把Vc做成一个锯齿波的形状,这就是斜率补偿。
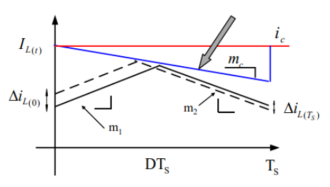
实现方法:在电流检测信号上叠加固定斜率斜坡,通常为电感电流上升斜率的50%~100%。
好了,更深的暂时不懂了,先到这里吧,其实对于应用工程师了解是怎么回事就可以,因为很多芯片都集成到里面了。
轻载和DCM
前面说到的DCM问题:电流环在电感电流断续时失效,可能导致振荡。
解决方法:
- 强制进入CCM,如增加假负载。
- 采用脉冲跳跃(Pulse Skipping)或突发模式(Burst Mode)。
检测模式的优缺点
最后来总结下不同电流检测方式的优缺点吧
峰值电流模式
优点:
- 逐周期限流:天然防止过流,无需额外保护电路。
- 动态响应快:直接控制电流峰值,对负载瞬变响应迅速。
- 简化补偿:电流环将系统降为一阶,电压环只需Type II补偿。
- 输入电压扰动抑制:自动抵消变化的影响。
缺点:
- 次谐波振荡:占空比 D>50%时需斜率补偿(Slope Compensation)。
- 噪声敏感:峰值电流检测易受开关噪声干扰(需滤波但可能延迟响应)。
- 轻载不稳定:在DCM下电流环失效,可能需强制CCM或跳频模式。
适用:高动态负载(如CPU/GPU供电)、Boost/Buck-Boost拓扑
平均电流模式
优点:
- 更平滑的电流控制:适用于对电流纹波敏感的应用,如PFC、精密电源。
- 无次谐波振荡问题:无需斜率补偿,适用于任意占空比。
- 抗噪声能力强:平均滤波减少开关噪声影响。
缺点:
- 响应速度较慢:因低通滤波引入延迟,动态性能略逊于峰值模式。
- 复杂度高:需额外的电流误差放大器,增加补偿设计难度。
- 成本较高:可能需要高精度电流传感器。
应用:功率因数校正(PFC)、LED驱动、电池充电器等需要精确电流控制的场合。
谷底电流模式
优点:
- 天然抗噪声:谷值检测时开关节点(SW)电压稳定,噪声干扰小。
- 适合低占空比:在 D<50% 时稳定性好(如Buck低压输出)。
- 轻载效率高:易于实现DCM模式优化(如谷值跳跃)。
缺点:
占空比受限:D>50% 时可能不稳定(需特殊处理)。
动态响应较慢:因谷值检测滞后于峰值事件。
检测电路复杂:需精确同步谷值时刻。
适用:低输出电压Buck转换器(如手机PMIC)、轻载高效应用(如IoT设备)。
滞环电流模式
是不是觉得很奇怪?为什么这里也有滞环,其实这个是对其调制方式分类的一个说法,用以区分固定频率的PWM调制,滞环的窗口是电流那就归入CMC,滞环判断的窗口是电压,那就归入VMC。
检测点:设定电流上限和下限(滞环窗口),电感电流在窗口内波动。
特点:
- 无需补偿,响应极快,但频率不固定(变频控制)。
- 适用于对瞬态响应要求极高的场景(如射频电源)。
总结,最后再做个特性对比
| 特性 | 峰值电流模式 | 平均电流模式 | 谷底电流模式 |
|---|---|---|---|
| 检测点 | 电流上升峰值 | 电流平均值 | 电流下降谷值 |
| 是否需要斜率补偿 | 是(D>50%) | 否 | 通常否(D<50%) |
| 动态响应 | 最快 | 中等 | 较慢 |
| 抗噪声能力 | 弱 | 强 | 中等 |
| 轻载稳定性 | 差(需DCM处理) | 中等 | 优(适合DCM) |
| 适用拓扑 | Buck/Boost/Buck-Boost | PFC、精密电源 | 低压Buck、低占空比 |
| 复杂度 | 低 | 高(需电流误差放大器) | 中等 |

















 4715
4715

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









