




ubuntu系统安装ROS(简单版)V2
一、配置软件源
👍以安装的电脑的CPU架构选择镜像源
-
查询芯片架构方法
命令行输入:lscpu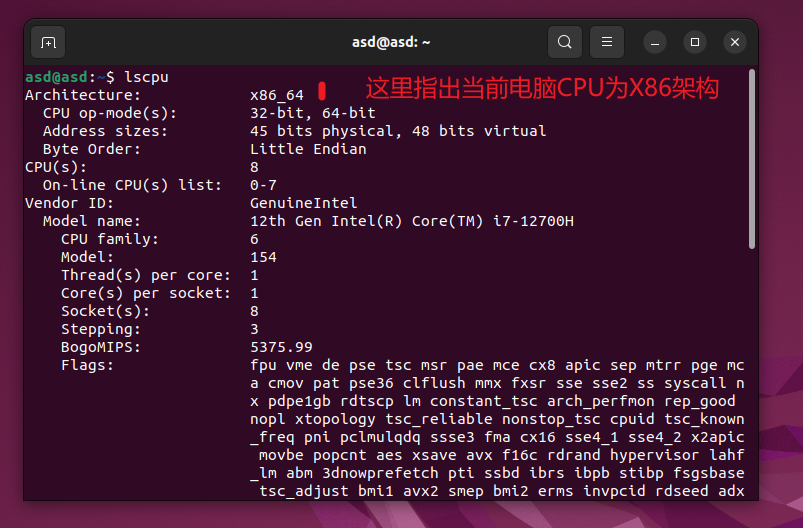
-
X86架构
-
Arm架构
🤖进入对应架构的网页-选择-对应版本的配置文本-复制粘贴
-
查询ubuntu版本LTS方法
uname -a
-
对应版本的配置文本-复制粘贴 -更改系统源文件

-
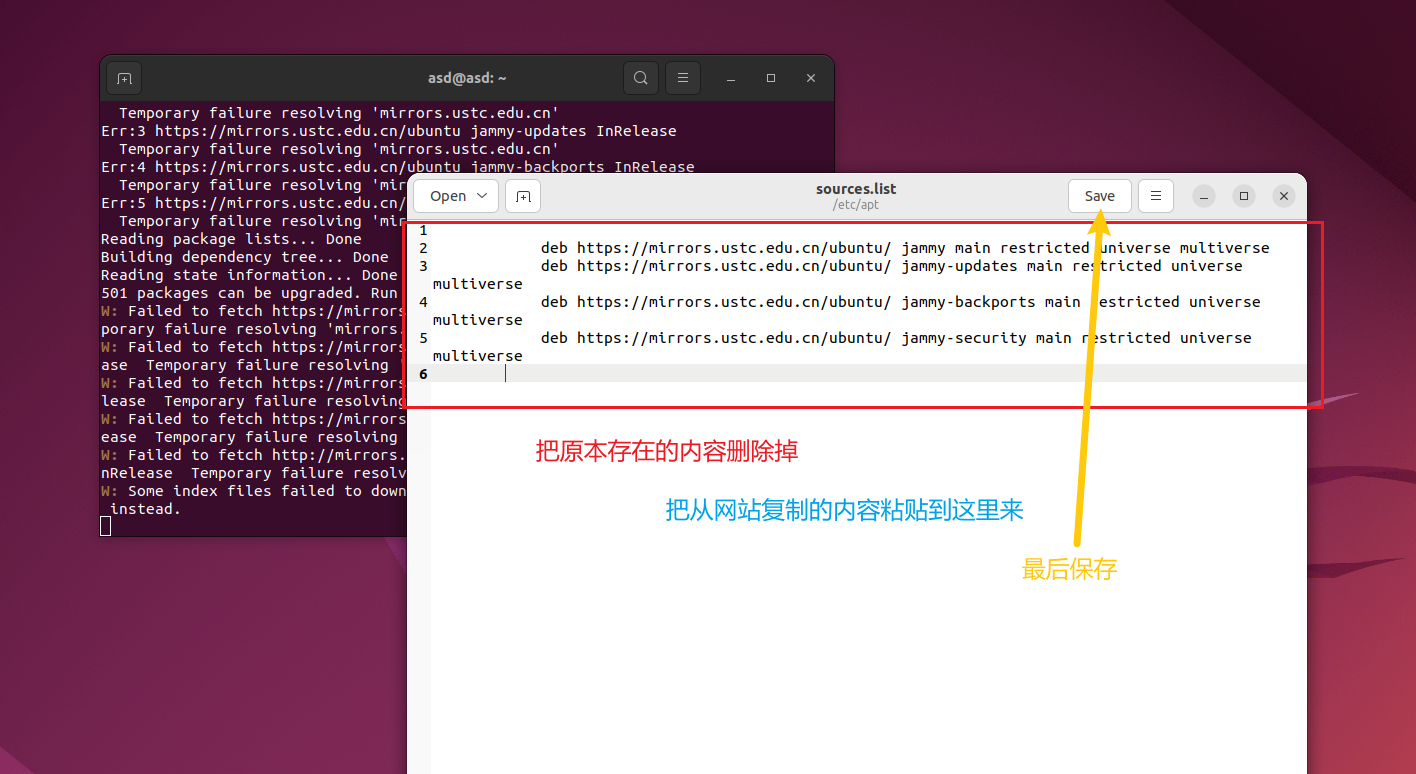
打开 Ubuntu 的终端,输入以下命令行打开一个文件内容
sudo apt update & sudo gedit /etc/apt/sources.list -
把原本的内容全删掉,然后复制刚才网页生成的文本框内容粘贴上去,保存文件,退出
二、安装ROS 一键安装
-
这里我们用鱼香ROS一键安装、打开ubuntu终端,输入:
wget http://fishros.com/install -O fishros && . fishros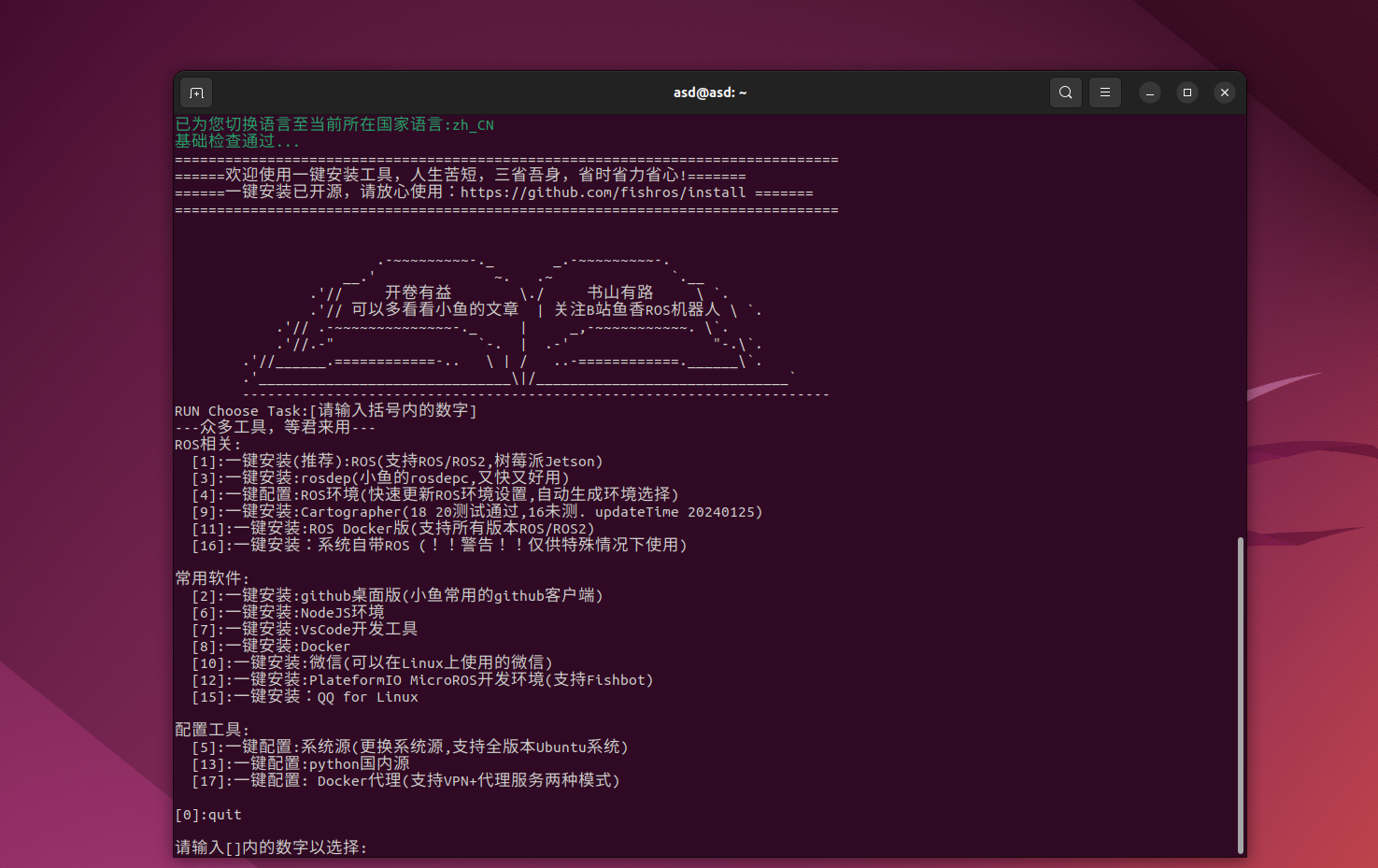
输入选择顺序:
- 第一步:
一键安装(推荐)ROS1 - 第二步:
不更换继续安装2 - 第三步:
中科大镜像源1 - 第四步:
选择对应的ROS版本自主选择
- 第一步:
uburnu对应ROS版本(只包含长期版本)
| Ubuntu STL | ROS发行版本 | 大版本 |
|---|---|---|
| 14.04 LTS | indigo | ROS1 |
| 16.04 LTS | Kinetic | ROS1 |
| 18.04 LTS | Melodic | ROS1 |
| 20.04 LTS | Noetic | ROS1 |
| 20.04 LTS | Foxy | ROS2 |
| 22.04 LTS | Humble | ROS2(推荐) |
| 24.04 LTS | Jazzy Jalisco | ROS2(短期支持版) |
报错:
注:如报错,翻译为网络原因,请检查游览器是否有网络连接,再重新执行,在输入选择顺序时,在第二步选择 更换镜像源安装,如再有问题,详细查看数据
测试ROS小乌龟验证:
-
Ros1启动命令
1、新建三个终端,每条命令在每一个终端单独执行
roscorerosrun turtlesim turtlesim_node2、第二命令执行后会出现 弹窗 一个蓝色屏幕的小海龟在中间
rosrun turtlesim turtle_teleop_key3、第三命令执行后,把鼠标放在终端,就可以通过按下键盘的方向 ↑ ↓ ← →键来对小海龟进行控制了。
-
Ros2开启命令 – ros2没有中心节点,不需要roscore!
1、新建第一个终端,命令执行后会出现 弹窗 一个蓝色屏幕的小海龟在中间
ros2 run turtlesim turtlesim_node2、新建第二个终端,执行命令把鼠标放在终端,就可以通过按下键盘的方向 ↑ ↓ ← →键来对小海龟进行控制
ros2 run turtlesim turtle_teleop_key
安装完成
(全局)配置rosdep(可选):
rosdep是 ROS(机器人操作系统)中的一个工具,用于安装系统依赖项。ROS是一个用于构建机器人软件的开源框架,它依赖于许多系统级别的软件包。rosdep的作用是帮助用户轻松地安装这些系统依赖项。
安装方法,打开ubuntu终端,输入:
wget http://fishros.com/install -O fishros && . fishros
一键安装rosdep3
(全局)更新系统环境:
打开ubuntu终端,输入:
wget http://fishros.com/install -O fishros && . fishros
一键配置ROS环境4
ROS配置完成,到这里,我们的ROS已经正常使用了,出发吧,少年!
版本更新信息:
2023-08-02 | V1版本 初代版本
2025-10-21 | V2版本 更新镜像源为阿里源、精简教程

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









