







1.场景定义
在日常的交通行驶中,由于天气原因引起的能见度低或存在遮挡的情况下,到近端才发现前方同车道有异常车辆; 或者前方车辆突然停车。 上述情况下后方车辆通常会紧急变道,如果后车还紧跟着行驶车辆,发生追尾的可能性很大。如果存在C-V2X信息交互,后方一定范围内的车辆能够提前获知前方异常车辆信息或车辆紧急制动信息,从而提前预判进行减速或换道规避碰撞风险,保障行车安全。
2.适用范围
该场景适用于高速道路、城市道路、郊区等所有可行车区域。
3.场景功能点
车辆在行驶过程中,接收到周围一定范围内车辆发出的BSM周期性消息(位置和姿态等信息)和事件消息(紧急刹车事件)。若发现同一车道车路云一体化系统C-V2X车车/车路协同典型应用场景及实施参考
前方有异常车辆并存在碰撞风险时,车端C-V2X协同应用系统则触发“ 前方异常车辆” 预警,在HMI显示出来。具体实施规则如下:
1) 分析接收到的远车信息,筛选出位于同一车道前方区域的车辆;
2) 进一步筛选处于一定距离范围内的远车作为潜在威胁车辆;
3) 计算每一个潜在威胁车辆碰撞时间TTC或防撞距离CAR,筛选出与本车存在碰撞风险的威胁车辆;
4) 若有多个威胁车辆,则筛选出最紧急的威胁车辆;
5) 如果存在“ 融合感知和决策” 模块,则融合其他感知信息联合决策输出预警消息,否则就直接输出碰撞预警消息在HMI显示。
4.基本性能要求
1) C-V2X OBU播发BSM消息频率为10 Hz, 信息传输平均时延在30ms以内,传输距离≥150 m;
2) 本车定位信息采集频率≥10 Hz, 偏差1.5 m之内占比95%以上;
3) 满足车车传输安全要求。
5.数据输入/输出
1) 数据输入:周围远车的位置和姿态信息、高精度地图信息(可选)、本车的车辆位置信息和姿态信息;
2) 数据输出: “前方异常车辆” 预警。
6.功能模块设计
1)场景功能模块
前方有遮挡异常车辆场景的功能模块如下所示。 其中:
✓ 输入系统:包括远车C-V2X OBU、 本车的组合定位系统以及底盘/车身系统,用橙色模块标识;
✓ 车端C-V2X协同应用系统:包括C-V2X数据处理、融合感知和决策,用绿色模块标识;
✓ 输出系统:即HMI,用黄色模块标识。
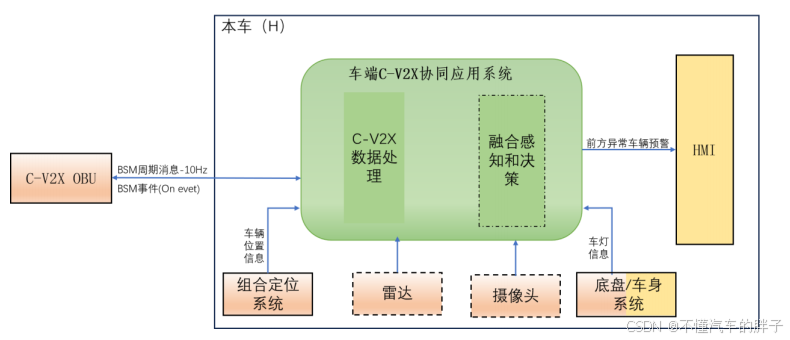
图 前方有遮挡异常车辆场景的功能模块图
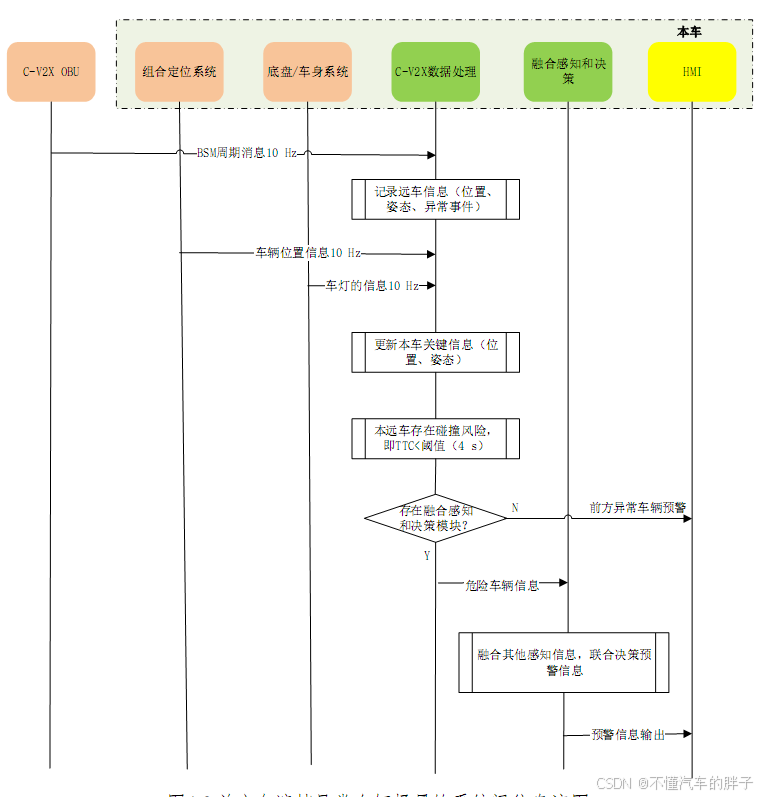
2) 系统间信息流程图
前方有遮挡异常车辆场景的系统间信息交互流程如下所示,主要描述不同系统间的信息交互内容,以及车端C-V2X协同应用系统的处理流程
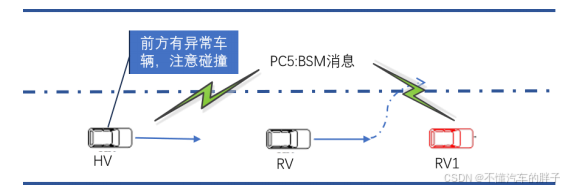
3)场景功能效果图
假设有一辆车( HV)和远车( RV) 以相同的速度保持固定的相对距离沿车道中间匀速行驶, RV突然发现前方有一辆异常车辆( RV1),准备切出到相邻车道。 这时HV通过接收RV1发出的BSM消息,提前了解到前方有异常车辆,车端C-V2X协同应用系统发出“前方异常车辆”预警消息。
人类驾驶员收到提醒后及时减速或换道到相邻车道,避免碰撞风险。
具体功能效果如下图所示。



















 1385
1385

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











