









一、工件坐标简介
在目标工作台的任意位置,任意角度创建一个直角坐标系,把这个坐标系叫做工件坐标。
在不同的位置创建工件坐标系,就可以实现,相同的程序在不同的位置实现相同的加工。
二、3点法设置工件坐标
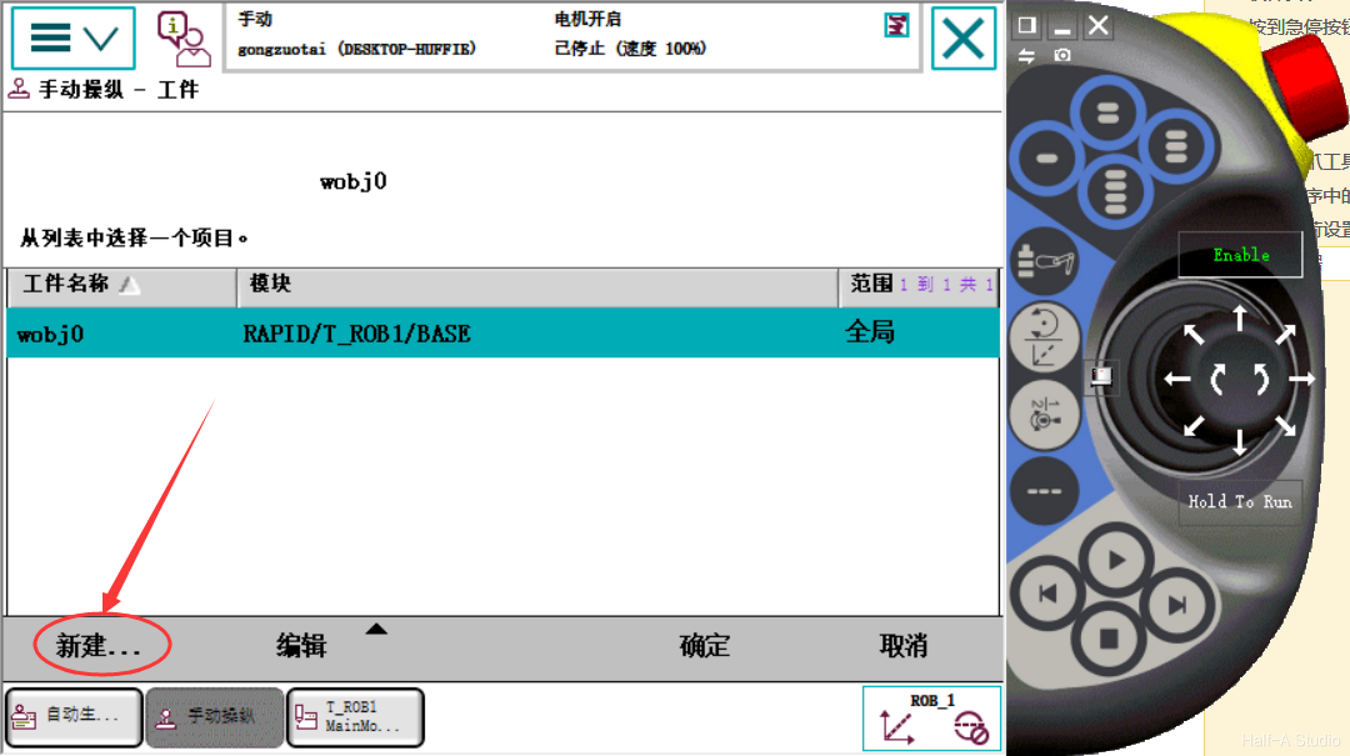
- 进入手动操作-工件坐标=新建,创建一个工件坐标

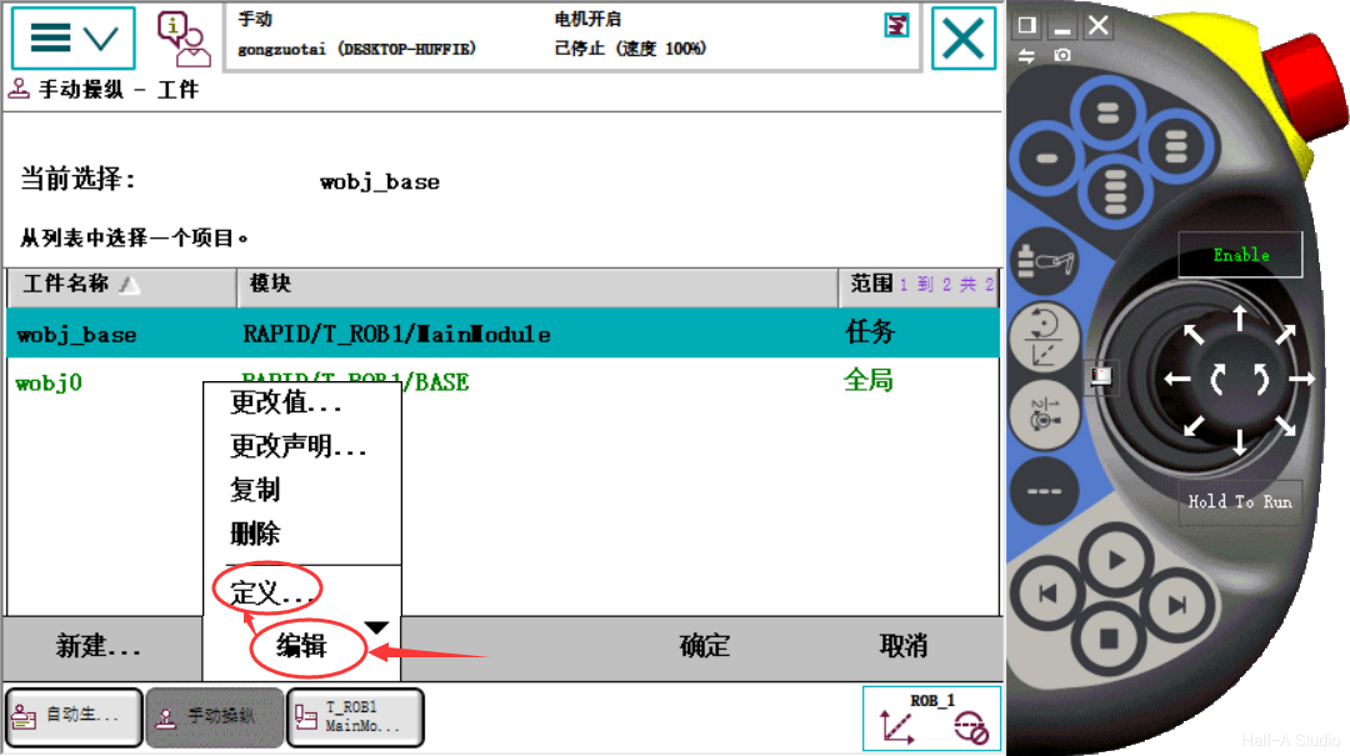
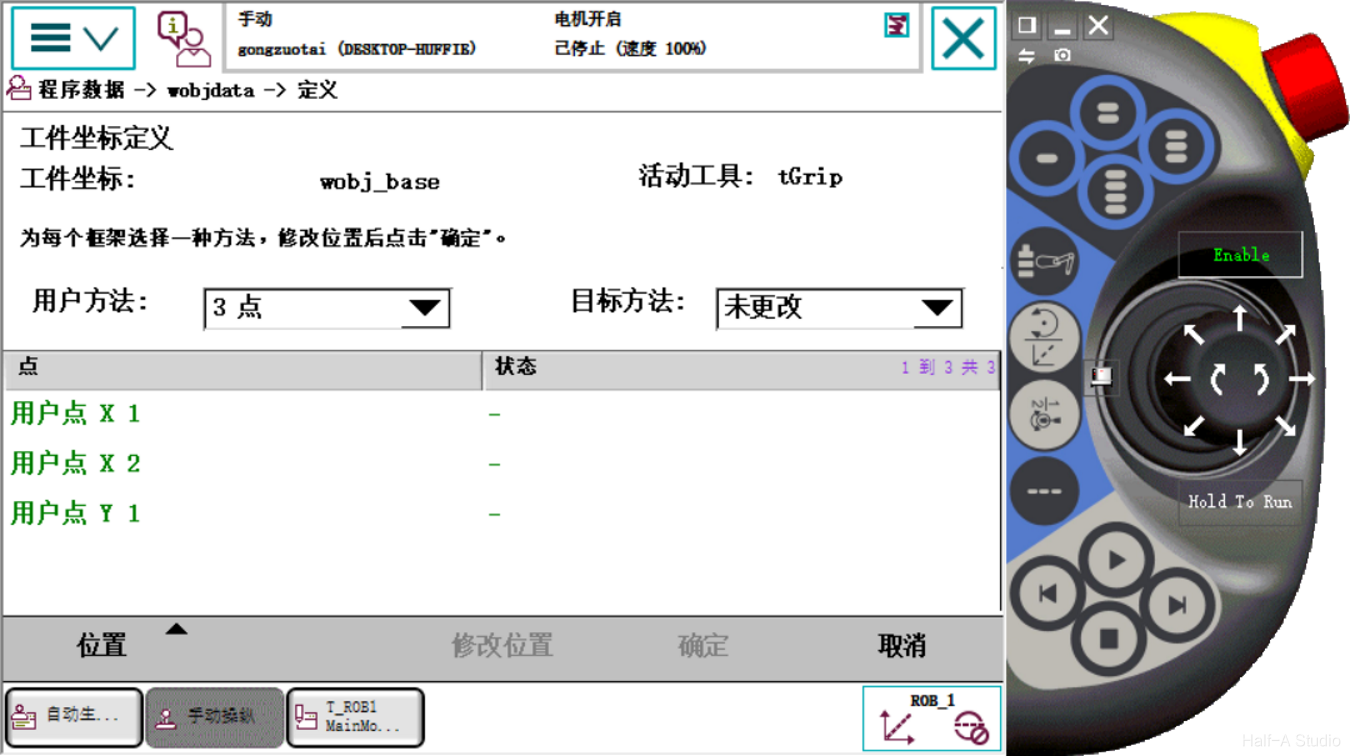
- 选中新建的工件坐标,编辑-定义,用户方法选择3点
- 如果想建立一个如下图所示的坐标系
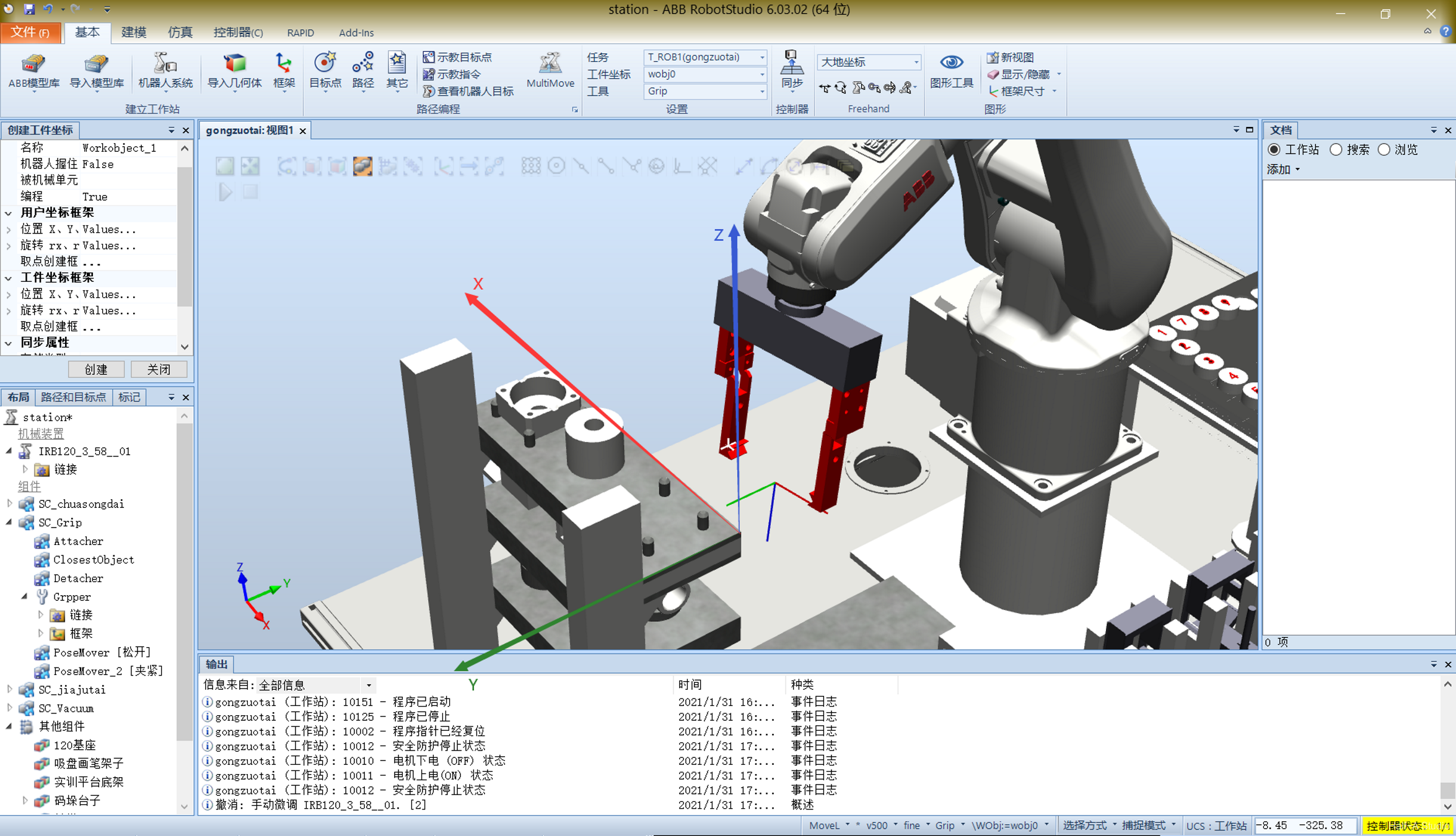
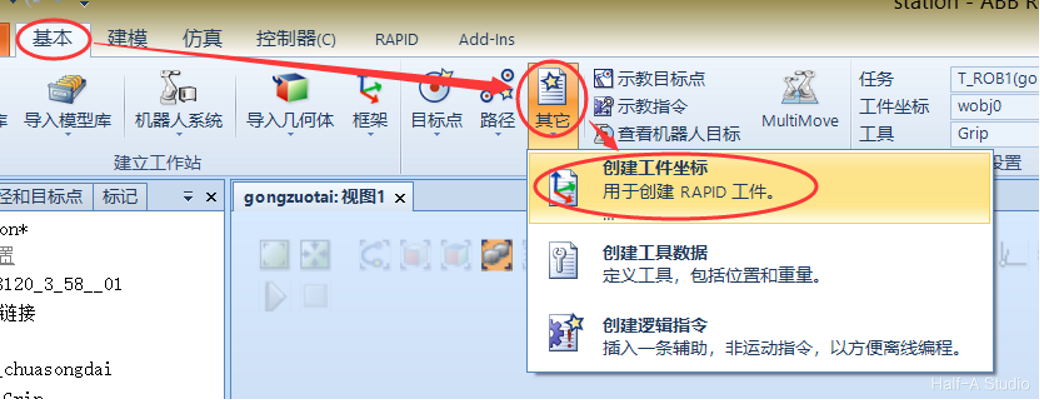
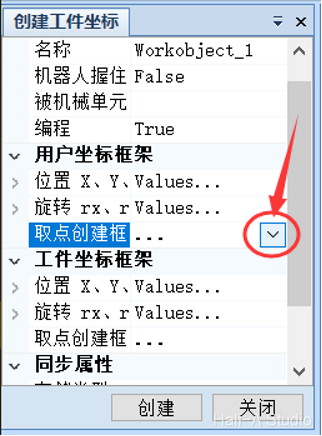
- 在仿真内选择基本-其它-创建工件坐标,用户坐标框架-取点创建框架,选择三个点即可创建坐标系。
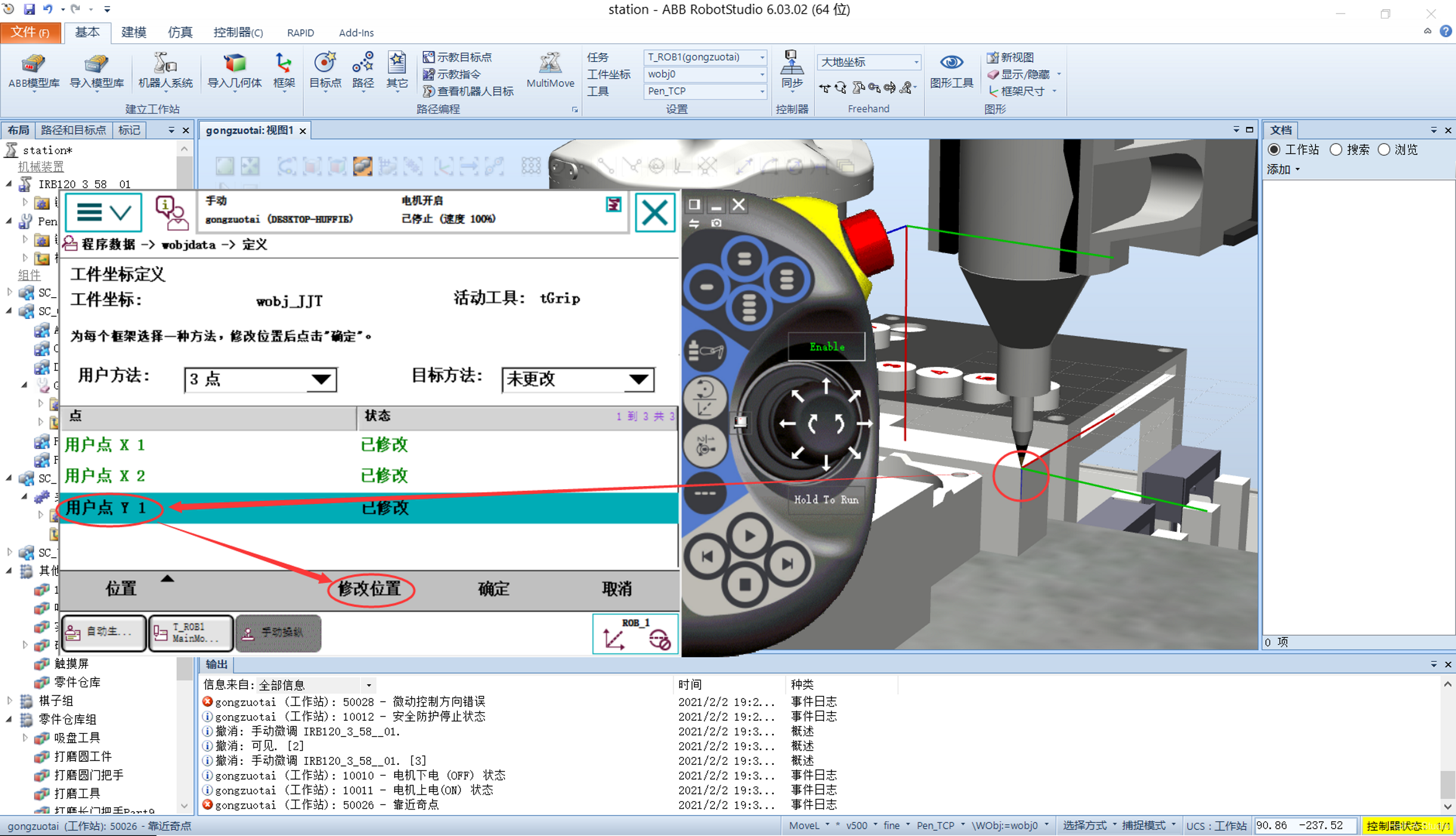
三、实际系统工件坐标的确定
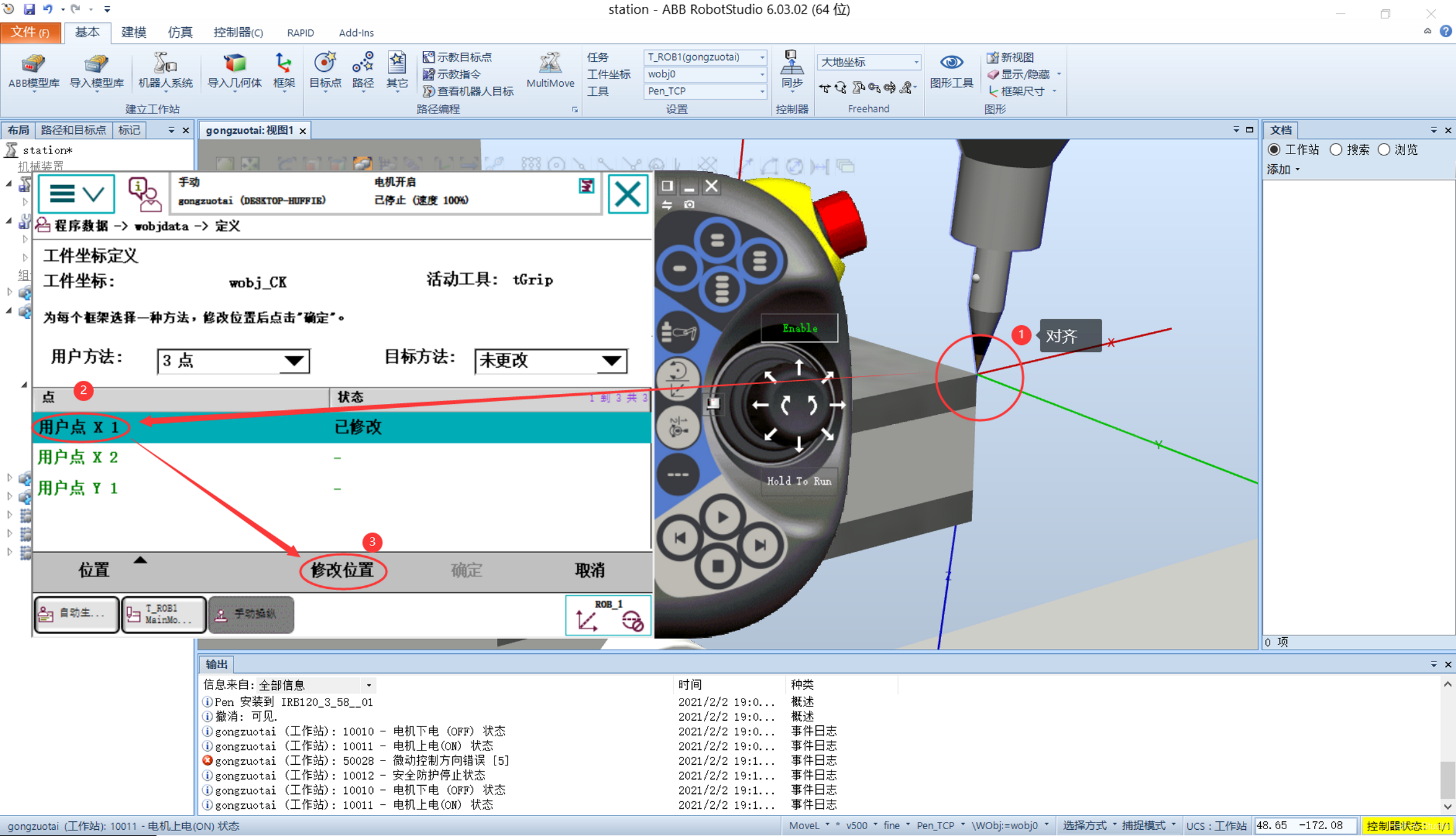
在操作实际机器人系统时,可以选择一个具有尖端的工件,手动操作对齐要确定的三个点,记录下来设置工件坐标。
-
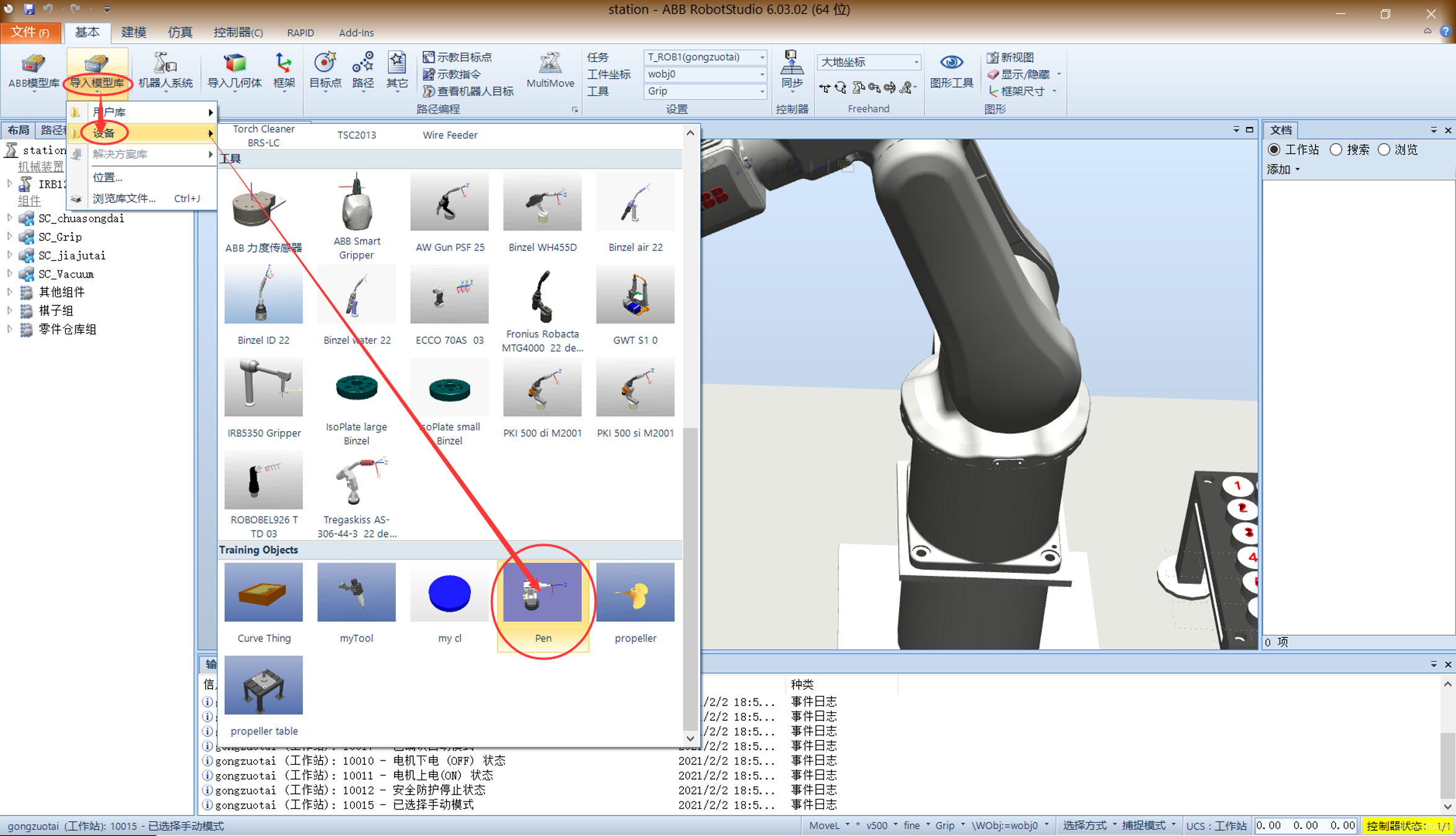
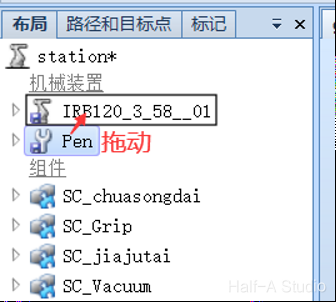
添加一个具有尖端的工具,用于确定目标点坐标。将工具添加到机器人系统中,并隐藏此前的夹爪工具。
-
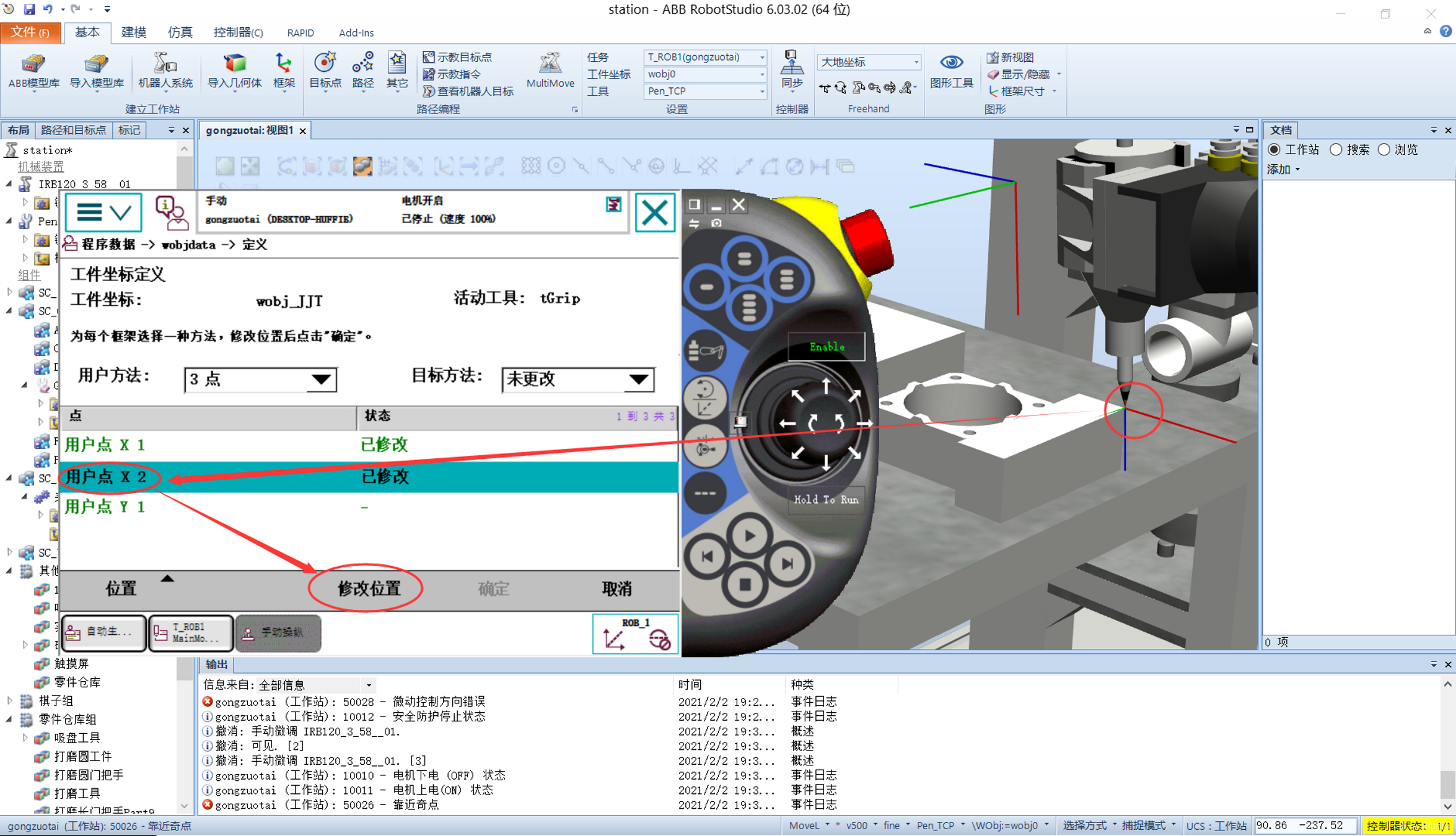
按照上文三点法设置工件坐标的前两步。选择仓库的三个点位分别设置为X1、X2、Y1,以此来确定工件坐标系。完成后点击确定。

-
同理在操作台也可以创建一个工件坐标

-
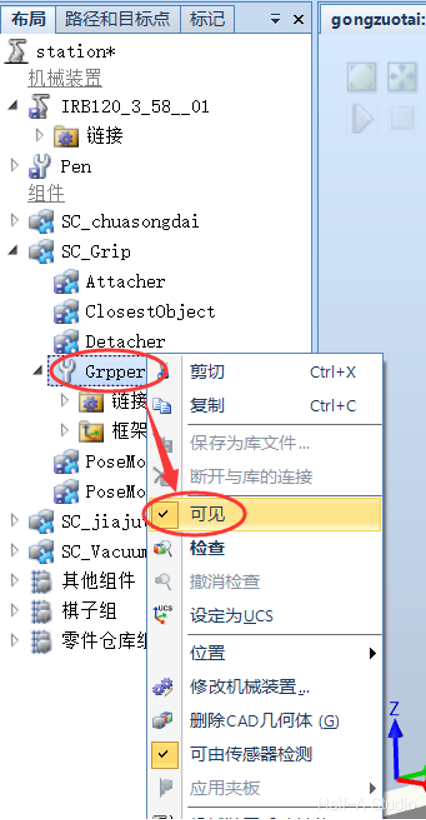
删除刚才添加用于确定点位的工具(Pen),令夹爪可见
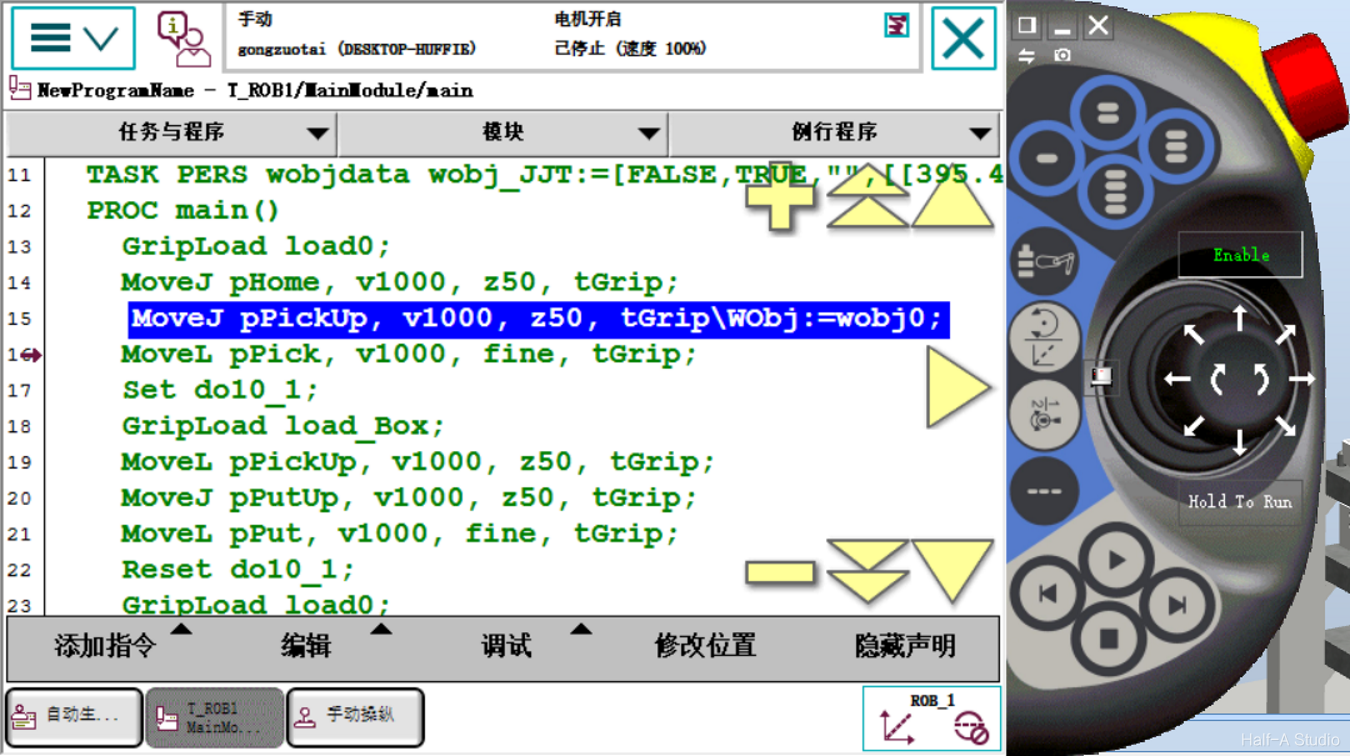
四、程序中工件坐标的修改方法
修改程序中的工件坐标,使在仓库夹取工件的部分动作使用仓库工件坐标系,在操作台的放置部分动作使用操作台工件坐标系,其余动作使用默认工件坐标系。
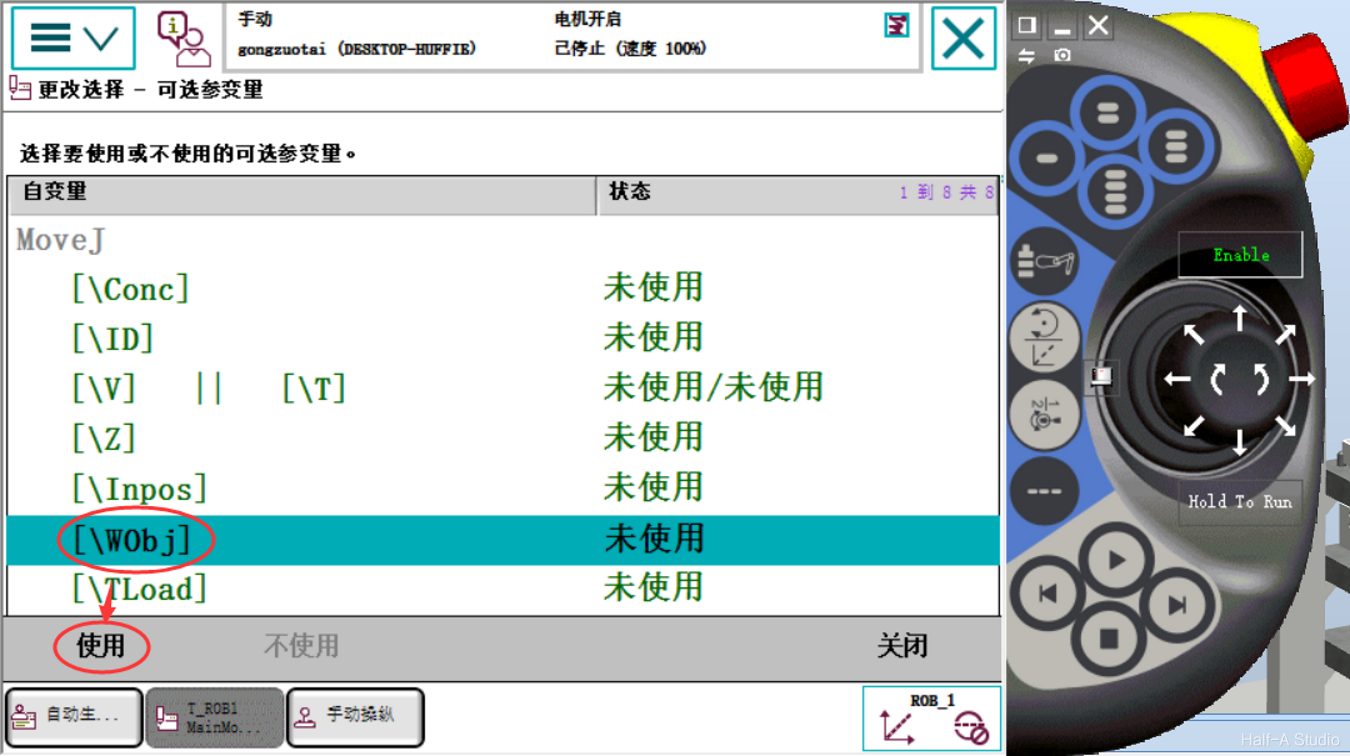
- 以pPickUP位置处的动作为例。单步运行程序,运行至pPickUP位置时,点击整条指令,可选变量—[\WObj]—使用
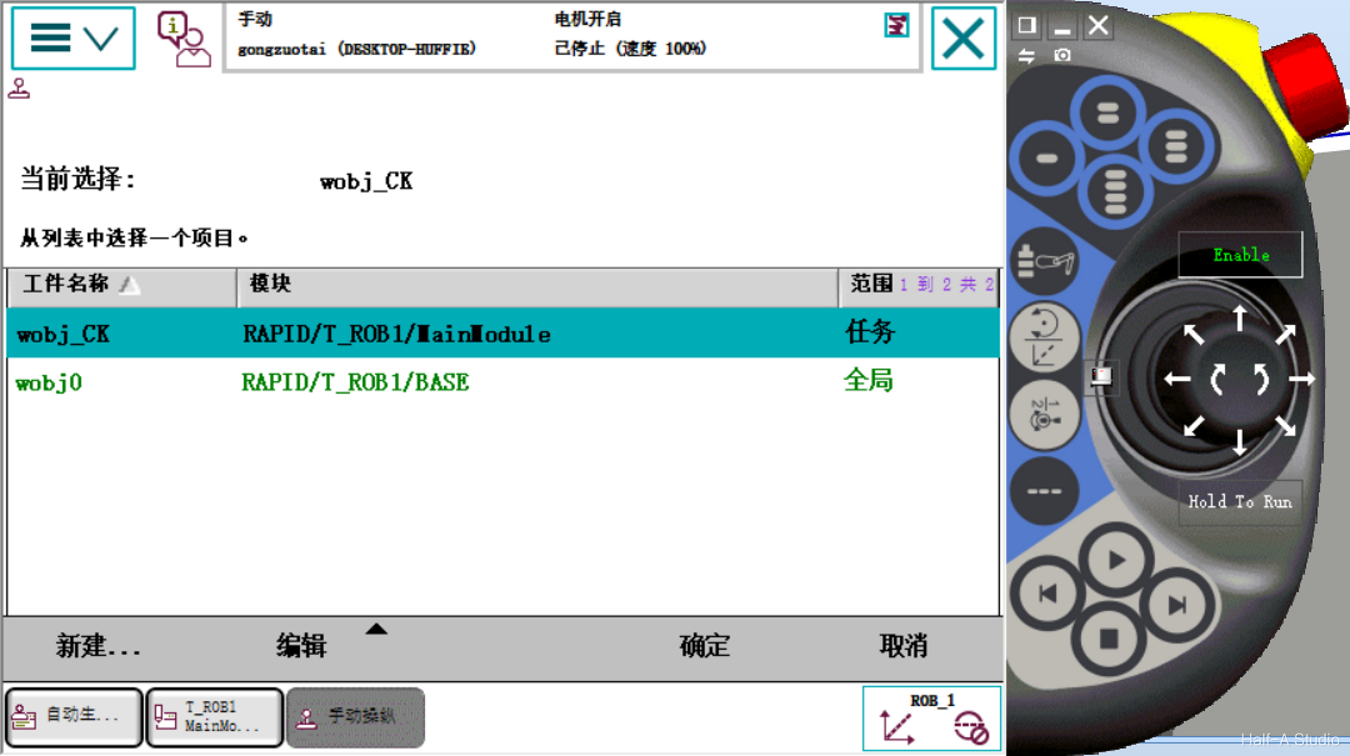
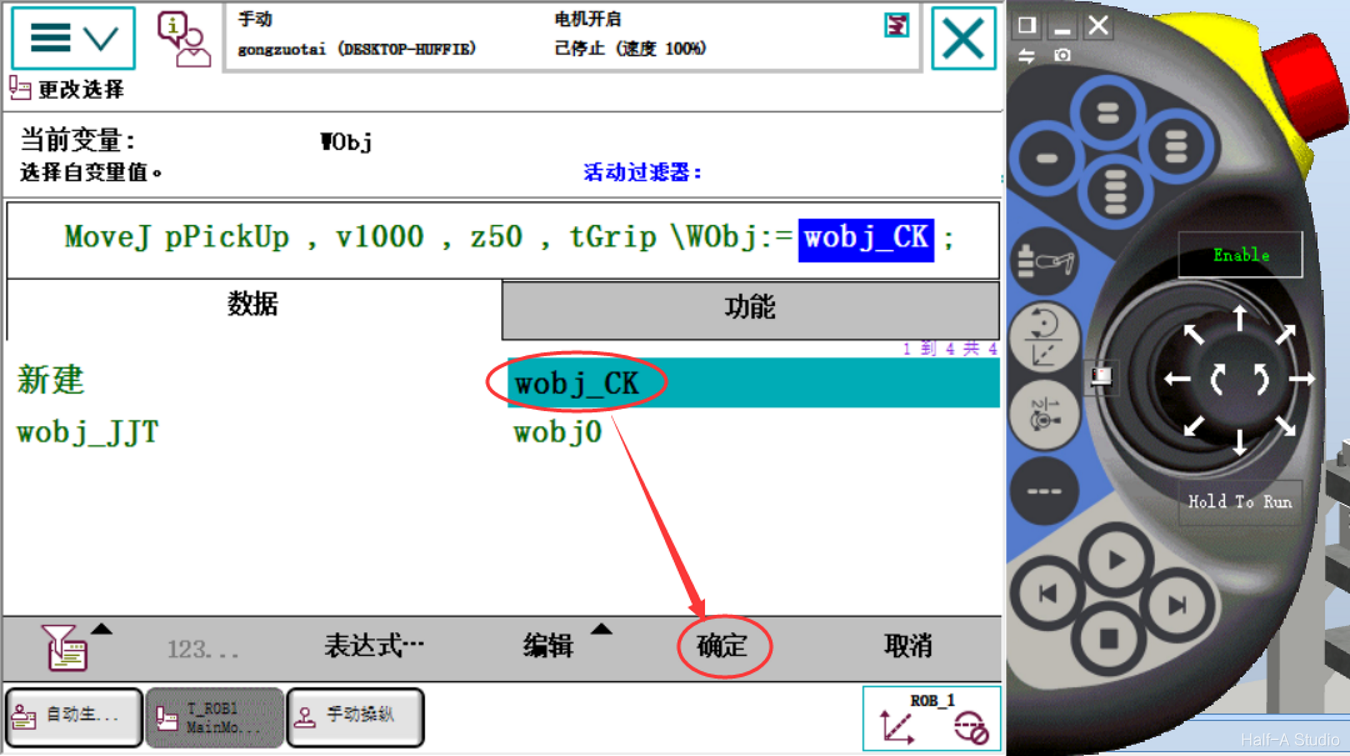
- 点击wobj0,选择wobj_CK确定
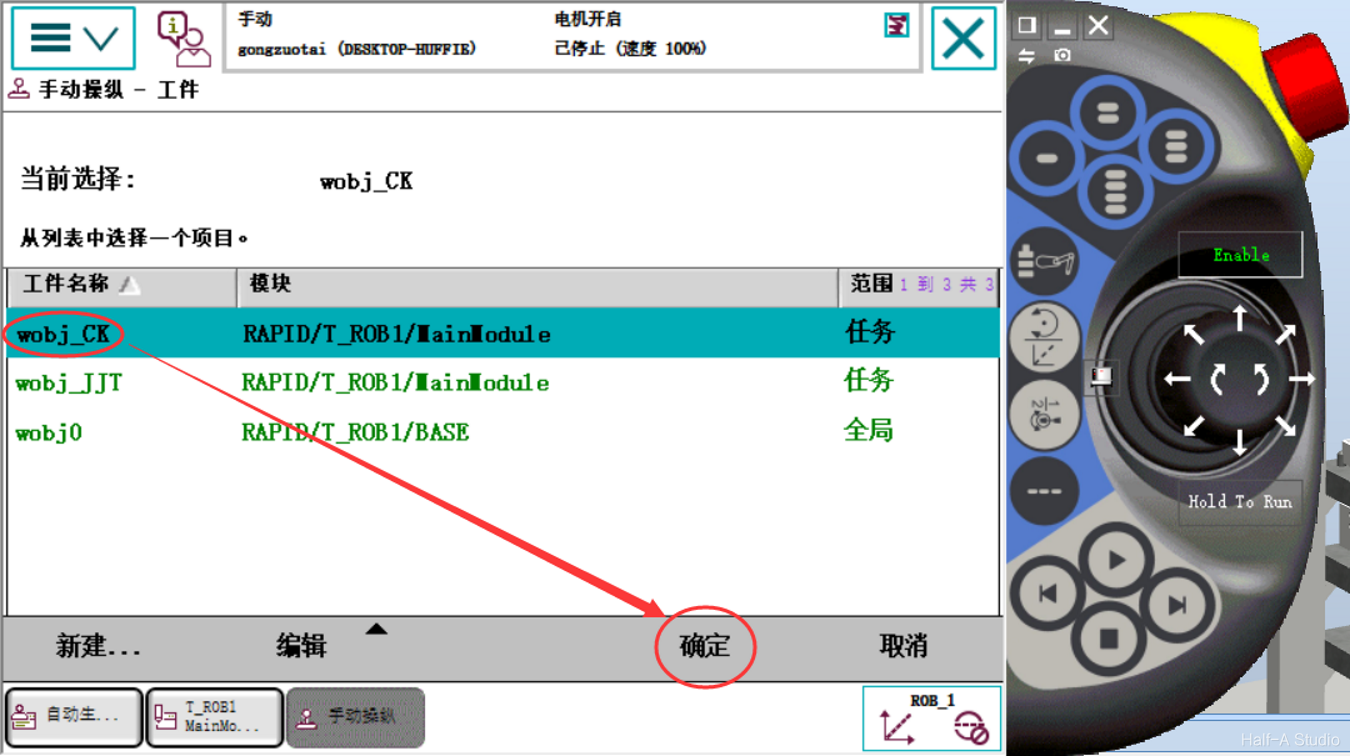
- 选择回到手动操作面板,点击工件坐标,选择wobj_CK

- 再回到程序编辑器,选择刚才编辑的那一条语句,修改位置即可。


















 683
683

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











