






前一节笔记详见 自动控制原理学习笔记(一)—— 控制介绍,一阶离散系统-CSDN博客
一、一阶离散系统的比例控制
我们在前一个笔记介绍过一阶离散(DT)系统和 P 控制器,控制器和一阶系统由如下方程组成:
P 控制器:
被控对象:
把第一个方程代入第二个方程,得
化简,得
该方程具有一阶离散系统的形式:
(1)
其中 是我们需要求解的变量,
是我们设置的输入函数,
是固有频率(原因之后会讲到),
是一个常数。在下一节,我们会研究这个系统的解以及方程(1)的性质。
二、一阶离散系统的解
我们对方程(1)进行分类讨论:
情形一:对于所有 n ,x[n] = 0(也称为零输入响应,ZIR)
方程可以化简为 。
容易得到该方程的解为
这是最简单的情形,其中稳态解由 的值决定。
如果 ,则
;
如果 ,则
;
如果 ,则
,不收敛 ;
如果 ,则
,不收敛。
情形二:对于所有 n ,x[n] = 1,且 y[n] = 0(也称为零状态响应,ZSR)
注意:在零状态响应中,x[n] 可以为任何函数,这里我们定义 x[n] = 1 。
方程可以化简为
(2)
假设解是收敛的,我们想知道 。由于
接下来我们想得到 。从
不断迭代,于是
最终,我们得到
和
于是
代入 的值,我们得到
(3)
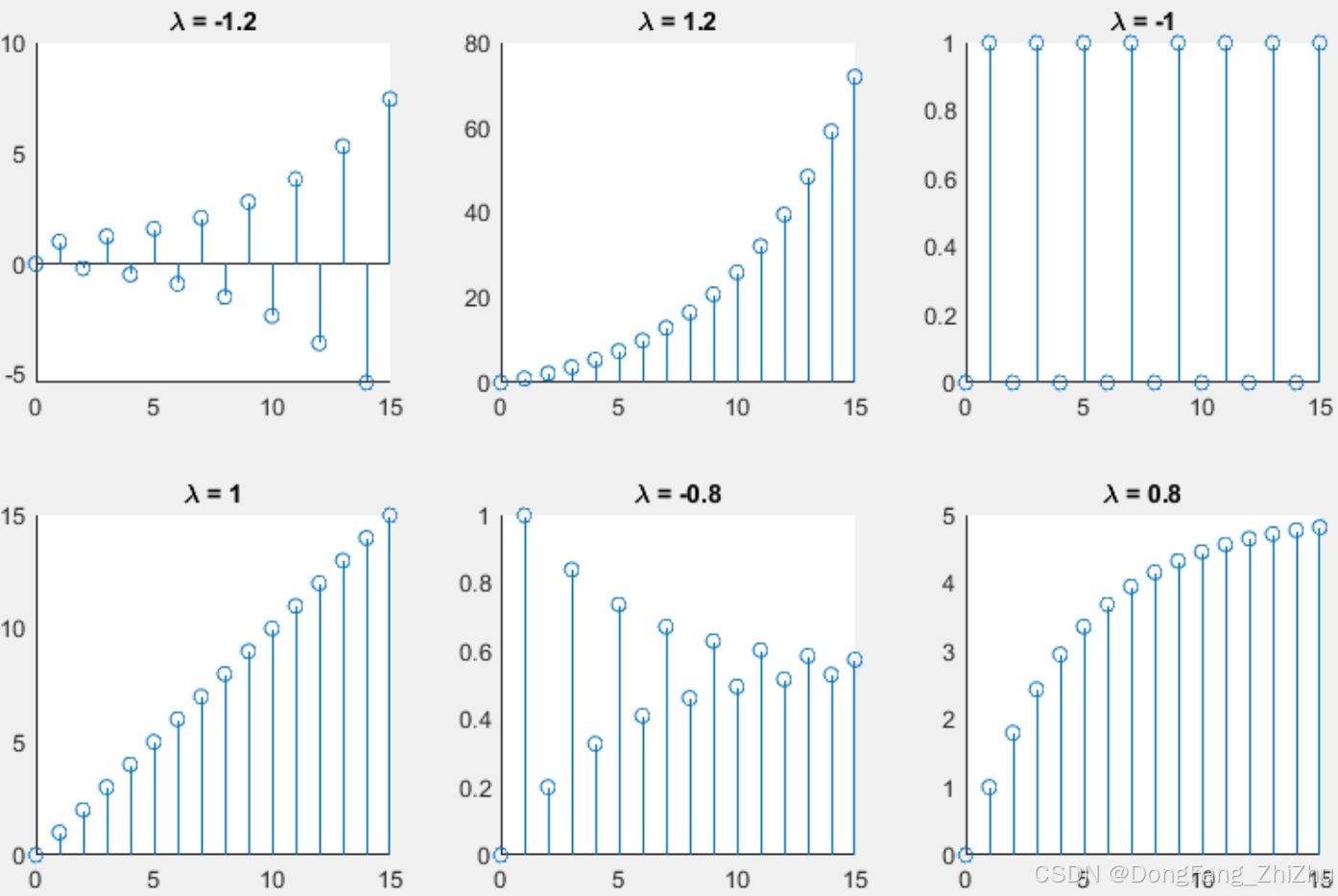
我们想知道解长什么样子,令 b = 1 ,分 6 种情况讨论:
,解发散;
,解发散;
,解发散;
,解发散;
,解收敛;
,解收敛。
现在我们终于知道了如何求解一阶离散(DT)系统,然后我们再返回到之前3D打印机的例子。再强调一遍, 决定了系统的解是否收敛,故选择合适的
是设计稳定系统的关键。
三、在一阶系统选择 Kp:稳定性,稳态误差和收敛性
返回到之前3D打印机的例子,该系统的系统方程为:
那我们该如何选择 来构建一个“合适的”控制器?
首先,由第二节中方程(2)对应找到 和
,则
这里我们假设目标温度 Td[n] 为一个常数。
接下来我们逐一分析该系统的性能指标:
(1)稳定性:
在这个控制问题中,Kp 必须在上述范围中才能使得系统稳定(即 有界)。
(2)稳态误差:
我们可以使用稳态解来判断这个系统是否有稳态误差,于是
在这个系统中, 。只要这个系统稳定,则稳态误差为零。当然,在某些系统中,稳态误差不一定为零,这个系统只是一个特例,Kp 的值会影响稳态误差。
(3)收敛速度:
虽然我们得到了 Kp 的大致范围,但没有找到最优的 Kp ,且这个系统中有许多模块需要优化。在本例中,我们希望 能快速逼近
。在第二节中得到的函数(3)中,
我们随便令 ,则
我们发现,这个系统只需一步就可以达到目标温度,收敛速度很快。在现实生活中,系统常常受外部噪声干扰,因此在设计控制器时需要考虑多方面的因素。
关于线性定常系统的介绍,详见下回分解。

















 32万+
32万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









