






基于改进A*算法的多AGV路径规划,MATLAB仿真程序,时间窗口规划,传统是8个方向,可以斜着规划路径,改进为上下左右4个方向,仿真避开冲突问题 ,输出路径图,时空图。
YID:8539708619508160
请叫我醉04551

标题:基于改进A*算法的多AGV路径规划及MATLAB仿真实现
摘要:本文旨在提出一种基于改进A*(A-star)算法的多AGV(Automated Guided Vehicle,自动导引车)路径规划方法,并通过MATLAB仿真程序展示其在时间窗口规划、路径规划方向的改进以及冲突避免等方面的优势。通过输出路径图和时空图结果,验证了该方法在多AGV系统中的可行性和效果。
一、引言
多AGV系统已广泛应用于物流仓储、智能制造等领域,它能够实现无人化、高效率的物料搬运任务。而路径规划作为多AGV系统的核心技术之一,直接影响到系统的工作效率和安全性。
二、相关工作回顾
目前,常见的多AGV路径规划方法包括基于Dijkstra算法、改进Dijkstra算法以及改进A算法。其中,A算法能够在保证最短路径的情况下有效降低计算量。然而,传统A算法存在路径规划方向限制的问题,即仅能在8个方向上规划路径。本文将基于传统A算法,改进其路径规划方向为上下左右4个方向,从而提高路径规划的灵活性和效率。
三、基于改进A算法的多AGV路径规划方法
本节将详细介绍改进A算法的多AGV路径规划方法。首先,将AGV系统建模为图结构,其中节点表示地图中的位置,边表示相邻位置之间的移动代价。然后,利用改进A*算法,通过启发式函数计算代价估计值,并动态更新开放列表和关闭列表,最终得到多AGV的最优路径。
四、MATLAB仿真程序设计与实现
为了验证改进A算法的有效性,我们设计了一个MATLAB仿真程序。该程序将多AGV系统中的地图、车辆初始位置、目标位置等作为输入,并通过改进A算法计算得到最优路径。同时,为了模拟AGV系统在时间窗口内完成任务的情况,我们引入了时间窗口规划。在仿真过程中,程序能够实时检测AGV之间的冲突情况,并通过路径调整来避免冲突的发生。
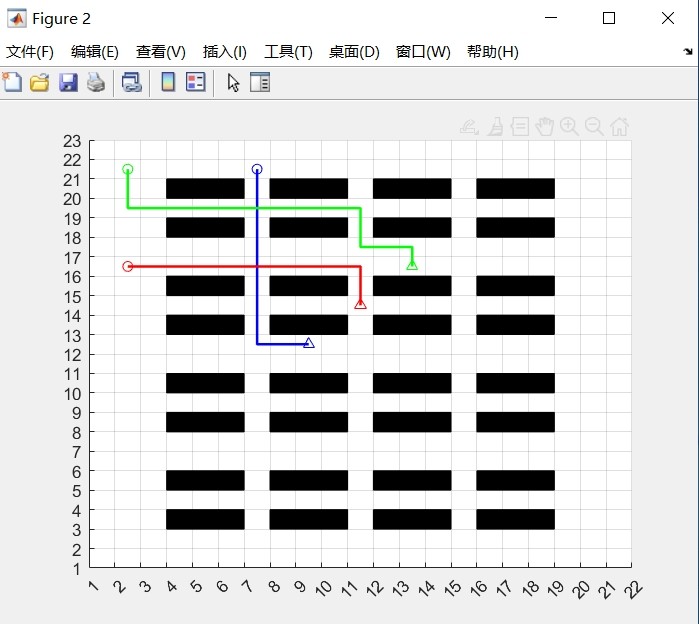
五、仿真结果与分析
通过运行MATLAB仿真程序,我们得到了多AGV系统中的路径图和时空图。路径图清晰地展示了每个AGV的行进路径,验证了改进A*算法在路径规划方向改进后的优势。时空图则展示了AGV系统中不同车辆在时间上的行进情况,从中我们可以观察到冲突避免的效果。
六、结论与展望
本文基于改进A算法提出了一种多AGV路径规划方法,并通过MATLAB仿真程序展示了其在时间窗口规划、路径规划方向改进以及冲突避免等方面的优势。仿真结果验证了该方法的可行性和有效性。未来,可以进一步优化改进A算法的启发式函数,提高路径规划的效率,并结合实际系统进行验证。
致谢:感谢程序员社区对本文的博客发表机会,同时也感谢导师和同事们的指导和帮助。
关键词:多AGV路径规划、改进A*算法、MATLAB仿真程序、时间窗口规划、路径图、时空图
以上相关代码,程序地址:http://wekup.cn/708619508160.html


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









