








实验室近期购置了一台UR5机械臂,需要给机械臂上ROS系统。于是查询各种资料、博客,以及翻墙到谷歌找到了一些资料。花了足足一个月时间终于在ROS系统上与UR5本体建立通信,并在RVIZ上控制UR5,记录安装调试过程以备后续任务。
1.首先说下配置:Ubuntu14.04+ROS indigo
2.安装UR5相关的各种包(详情请进网址:点击打开链接)
(1) cd ~/catkin_ws/src
1.首先说下配置:Ubuntu14.04+ROS indigo
2.安装UR5相关的各种包(详情请进网址:点击打开链接)
(1) cd ~/catkin_ws/src
(2) git clone -b indigo-devel https://github.com/ros-industrial/universal_robot.git
( 备注:如果你的ROS系统版本不是indigo,请将上面代码的indigo 换成相应的版本)
(3) cd ~/catkin_ws
(3) cd ~/catkin_ws
(4) rosdep install --from-paths src --ignore-src --rosdistro indigo
(备注:同样的,如果你的ROS系统版本不是indigo,请将上面代码的indigo 换成相应的版本)
(备注:同样的,如果你的ROS系统版本不是indigo,请将上面代码的indigo 换成相应的版本)
(5) catkin_make
( 6) source devel/setup.bash
OK! 到这里基本的包都已经安装完成,但想要动机械臂实物,还得进行关键的第三步。
3.ur_modern_driver驱动安装
虽然第二步中已经安装了ur_driver但这个驱动只支持比较早的UR5机械臂控制器的版本,换句话说,ur_modern_driver更适合(如果你的UR5本体的控制箱的软件版本是3.0以上)
具体的步骤:
(1)删除catkin_ws/src/universal_robot这个目录下的ur_driver文件夹,
(2)然后下载ur_modern_driver(点击打开链接)
(3)再解压,粘贴到原来的ur_driver这个文件夹的位置(把文件名更改为ur_modern_driver)。
(4)接着cd ~/catkin_ws
(5)最后catkin_make
好了,到这里基本上就完成了。
4.UR5本体实物通信测试
首先打开进入Ubuntu系统打开一个新的终端
(1) cd ~/catkin_ws
(2) source devel/setup.bash
(3) roslaunch ur_modern_driver ur5_bringup.launch limited:=true robot_ip:=
3.ur_modern_driver驱动安装
虽然第二步中已经安装了ur_driver但这个驱动只支持比较早的UR5机械臂控制器的版本,换句话说,ur_modern_driver更适合(如果你的UR5本体的控制箱的软件版本是3.0以上)
具体的步骤:
(1)删除catkin_ws/src/universal_robot这个目录下的ur_driver文件夹,
(2)然后下载ur_modern_driver(点击打开链接)
(3)再解压,粘贴到原来的ur_driver这个文件夹的位置(把文件名更改为ur_modern_driver)。
(4)接着cd ~/catkin_ws
(5)最后catkin_make
好了,到这里基本上就完成了。
4.UR5本体实物通信测试
首先打开进入Ubuntu系统打开一个新的终端
(1) cd ~/catkin_ws
(2) source devel/setup.bash
(3) roslaunch ur_modern_driver ur5_bringup.launch limited:=true robot_ip:=
IP_OF_THE_ROBOT [reverse_port:=REVERSE_PORT]
(备注:IP_OF_THE_ROBOT需要替换成UR5机械臂本体的静态地址)
(4) roslaunch ur5_moveit_config ur5_moveit_planning_execution.launch limited:=true
(备注:执行(4)之前开新的终端,先执行(2)再执行(4),不然可能会报错。)
5.roslaunch ur5_moveit_config moveit_rviz.launch config:=true
(备注,开新的终端,先执行4中的(2)再执行(5),不然可能会报错)
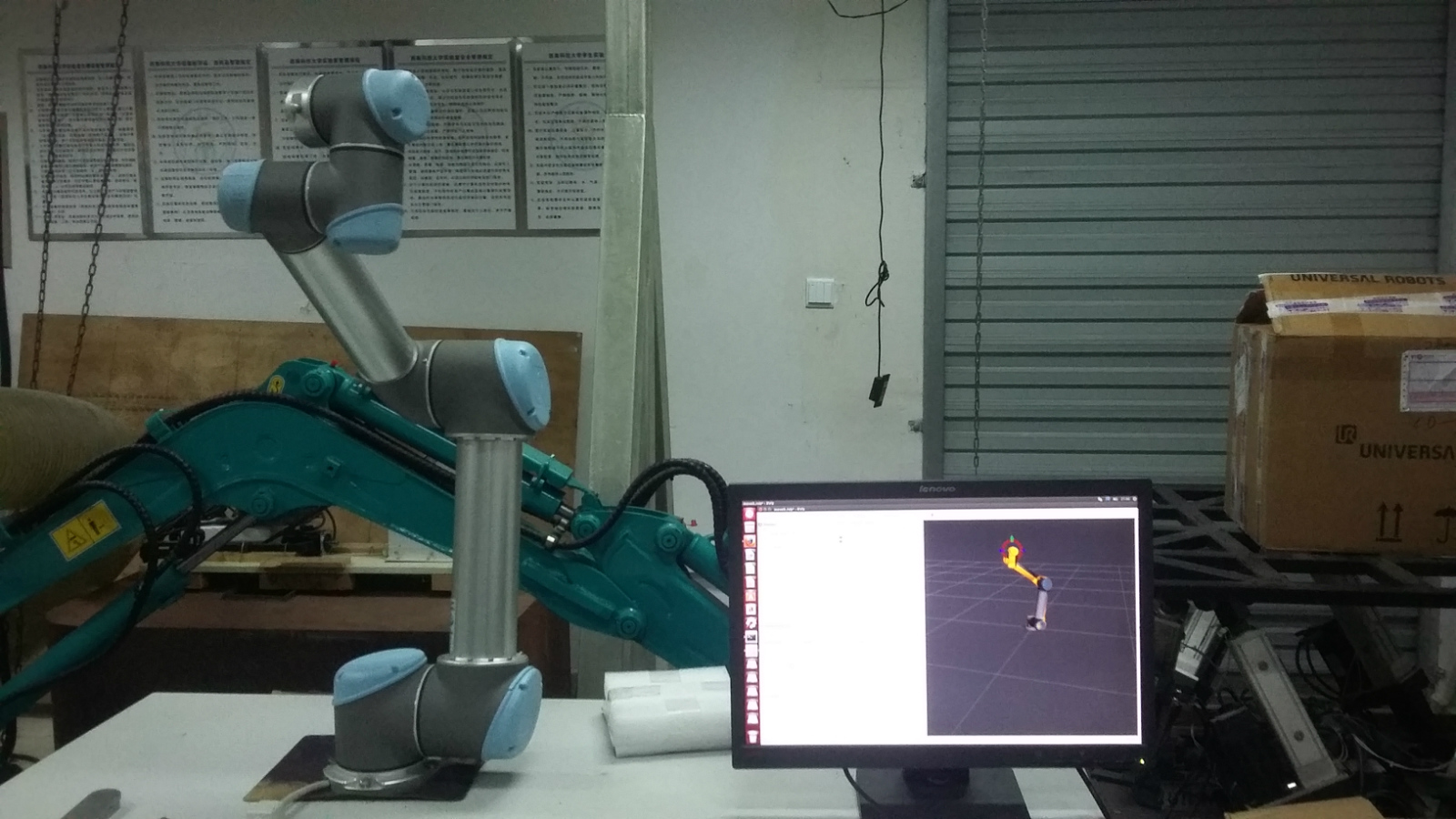
如果一切正常, 你就会看到RVIZ中的UR5机械臂和实物的状态是一致的,拖动UR5机械臂实物,在RVIZ里的机械臂也会跟着运动。此时,你可以在RVIZ中用鼠标拖动机械臂到达目标位置,在planing下点击plan,如果路径规划成功即可点击execute,你就会看到UR5实物也会跟着运动到目标点。
到此,UR5本体在ROS系统上的通信和控制都建立成功了。
(备注:IP_OF_THE_ROBOT需要替换成UR5机械臂本体的静态地址)
(4) roslaunch ur5_moveit_config ur5_moveit_planning_execution.launch limited:=true
(备注:执行(4)之前开新的终端,先执行(2)再执行(4),不然可能会报错。)
5.roslaunch ur5_moveit_config moveit_rviz.launch config:=true
(备注,开新的终端,先执行4中的(2)再执行(5),不然可能会报错)
如果一切正常, 你就会看到RVIZ中的UR5机械臂和实物的状态是一致的,拖动UR5机械臂实物,在RVIZ里的机械臂也会跟着运动。此时,你可以在RVIZ中用鼠标拖动机械臂到达目标位置,在planing下点击plan,如果路径规划成功即可点击execute,你就会看到UR5实物也会跟着运动到目标点。
到此,UR5本体在ROS系统上的通信和控制都建立成功了。















 839
839

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









