







使用ur3_bringup 可以连接真实机械臂
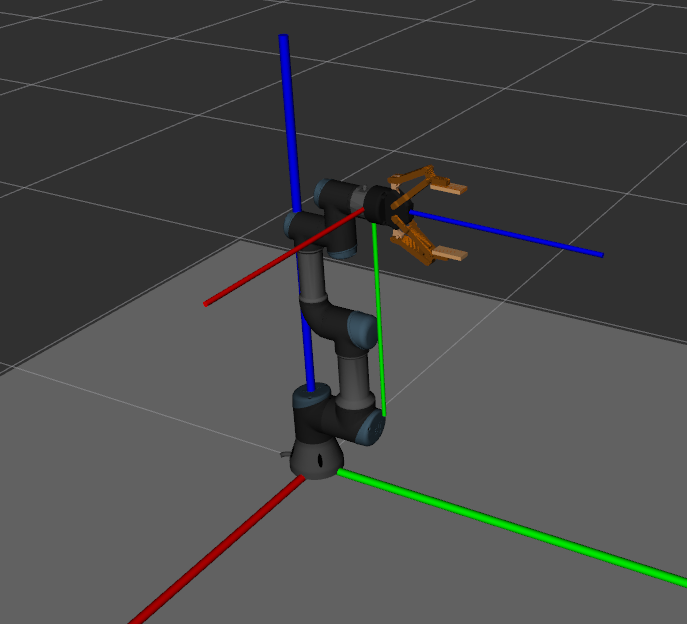
使用官方的ur3_moveit_planning_execution.launch 可以对机械臂 moveit规划。
但是只有机械臂,没有夹爪。
官方如图:
我把原来的ur3_moveit_config 复制出来,修改
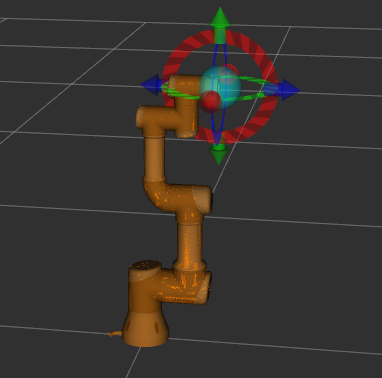
然后把ur3.xacro 等模型文件复制出来修改,修改完之后,有了夹爪,有了底盘。
规划组什么的使用moveit setup assistant 配置过了。
在rviz中可以笛卡尔空间规划了。
需要控制真实机械臂的,可以通过moveit setup assistant 配置,同时把控制器部分,不要自动生成,如果生成了,要删除。
进入 config/ros_controllers.yaml
改name:

这是针对我的ur3的控制器
想知道自己的控制器的名称的话,看自己的bridge(连接真实机械臂的文件),里面有控制器的名字。或者看命令行里面反馈的信息,得到控制器的名字。
这是连接真机的情况,gazebo的情况还没学习。
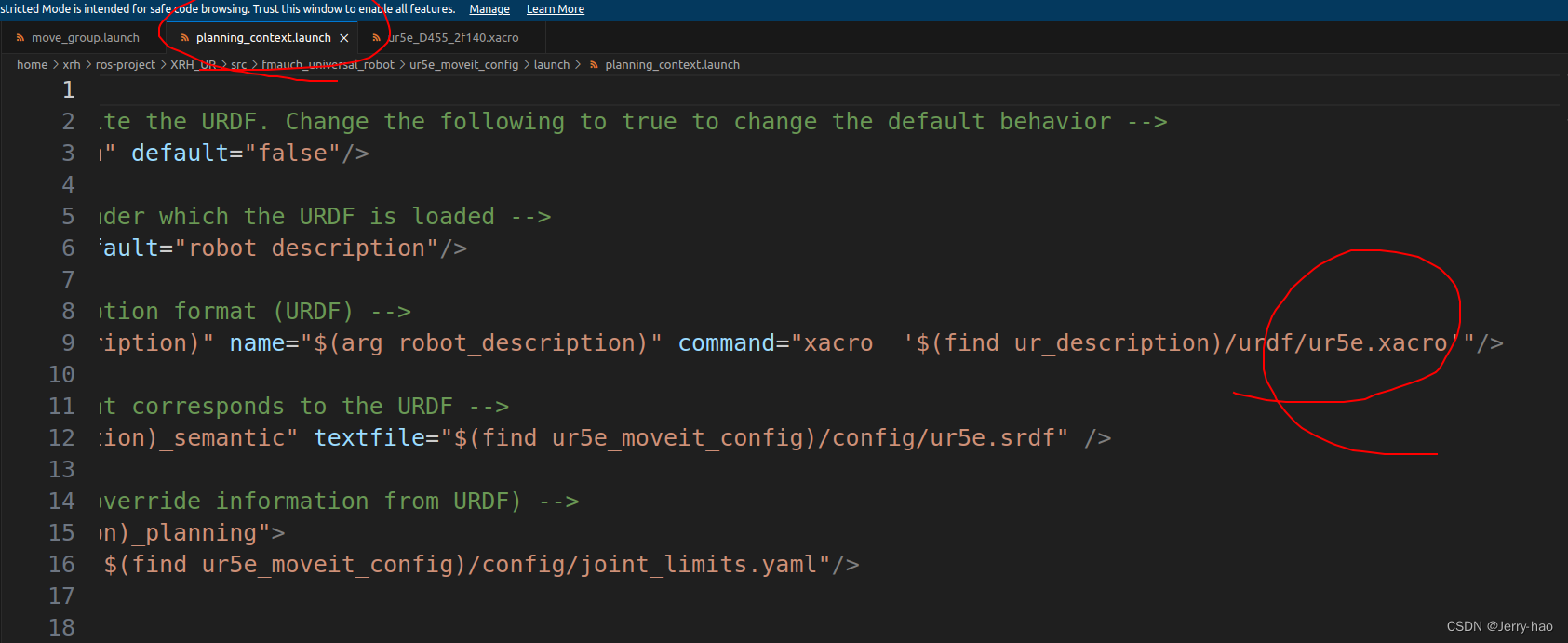
在planning_context.launch中添加 机械臂模型文件。
在/home/xrh/ros-project/XRH_UR/src/fmauch_universal_robot/ur_description/urdf中修改UR5e.xacro文件。
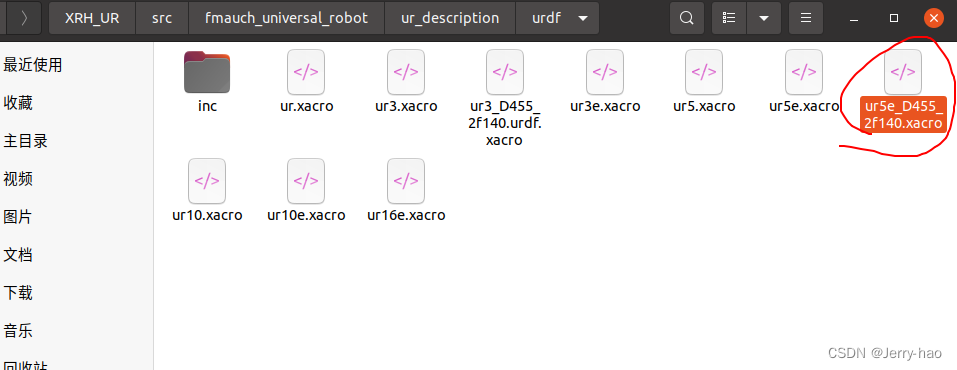
提前复制一个文件出来修改防止崩溃
以下是Ur5e_D455_2f140.xacro的修改后的内容。
<?xml version="1.0"?>
<robot xmlns:xacro="http://wiki.ros.org/xacro" name="ur5e_robot">
<!--
This is a convenience top-level xacro which loads the macro for the UR5e
which defines the default values for the various "parameters files"
parameters for a UR5e.
This file is only useful when loading a stand-alone, completely isolated
robot with only default values for all parameters such as the kinematics,
visual and physical parameters and joint limits.
This file is not intended to be integrated into a larger scene or other
composite xacro.
Instead, xacro:include 'inc/ur5e_macro.xacro' and override the defaults
for the arguments to that macro.
Refer to 'inc/ur_macro.xacro' for more information.
-->
<xacro:include filename="$(find ur_description)/urdf/inc/ur5e_macro.xacro"/>
<xacro:ur5e_robot prefix="" />
<xacro:include filename="$(find robotiq_2f_140_gripper_visualization)/urdf/robotiq_arg2f_140_model_macro.xacro"/>
<!-- <xacro:include filename="$(find robotiq_2f_140_gripper_visualization)/urdf/robotiq_arg2f_140_model.xacro"/> -->
<xacro:include filename="$(find cd455_455_description)/urdf/CD455_455.SLDASM.urdf"/>
<xacro:robotiq_arg2f_140 prefix="" />
<joint name="ur_CD455" type="fixed">
<parent link="tool0"/>
<child link="cd455_base_link"/>
<origin xyz="0 0 0.01" rpy="0 3.1415926 3.1415926"/>
</joint>
<joint name="CD455_2f" type="fixed">
<parent link="cd455_base_link"/>
<child link="robotiq_arg2f_base_link"/>
<origin xyz="0 0 -0.015" rpy="0 3.1415926 1.5707963"/>
</joint>
<link name="moduan"/>
<joint name="tool0_moduan" type="fixed">
<!-- default toolframe: X+ left, Y+ up, Z+ front -->
<origin xyz="0 0 0.24" rpy="0 0 0"/>
<parent link="tool0"/>
<child link="moduan"/>
</joint>
<link name="desk">
<visual>
<geometry>
<box size="1.5 1.5 0.7" />
</geometry>
<material name="desk_color">
<color rgba="0.3 0.5 0.2 1" />
</material>
</visual>
<collision>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<box size="1.5 1.5 0.7"/>
</geometry>
</collision>
</link>
<joint name="baselink_desk" type="fixed">
<!-- default toolframe: X+ left, Y+ up, Z+ front -->
<origin xyz="0 0.7 -0.365" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="desk"/>
</joint>
</robot>
然后在planning_context中修改成改好的文件。

夹爪为什么是红色,还不知道怎么回事?















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









