







 本文详细解析了卡尔曼滤波的状态空间方程,并逐步导出了卡尔曼增益的计算过程,通过实例探讨如何最小化估计误差。涉及先验后验估计、误差协方差矩阵,适合动态系统状态估计的学习者。
本文详细解析了卡尔曼滤波的状态空间方程,并逐步导出了卡尔曼增益的计算过程,通过实例探讨如何最小化估计误差。涉及先验后验估计、误差协方差矩阵,适合动态系统状态估计的学习者。
大家好,我听了DR_CAN的B站博主的卡尔曼增益的详细推导,全网最详细的推到课程之后,
自己仔细的总结,在借鉴CSDN其他的博主,得到了现在的推导过程
一。状态空间方程
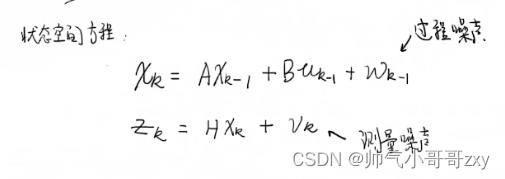
用状态方程的形式描述系统的动态响应。
二。卡尔曼增益的推导过程
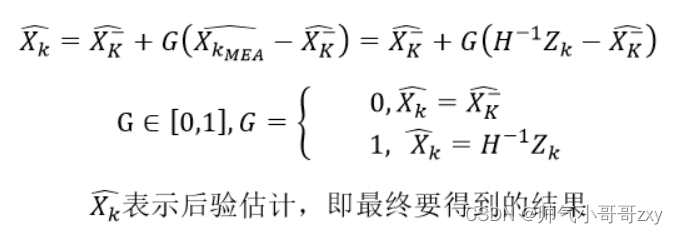
由于过程噪声是不确定的,于是状态估计值先验为

根据先验估计和测量估计可得出后验估计
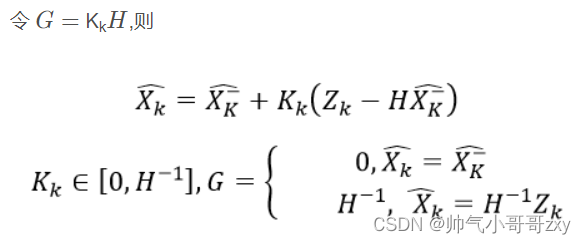
我们的目标是求得合理的Kk值使得估计误差最小,有
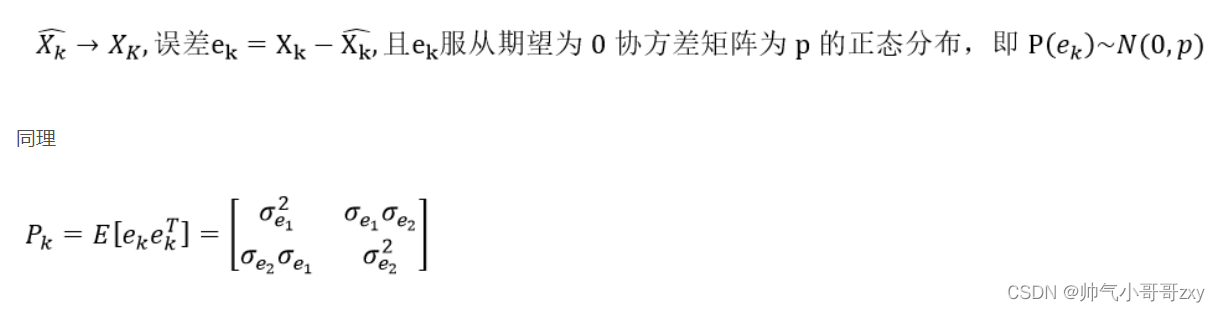
当后验估计值越接近真实值 Xk, 则说明 ek 的方差越小,即 ek 越接近于期望值0 00。于是有

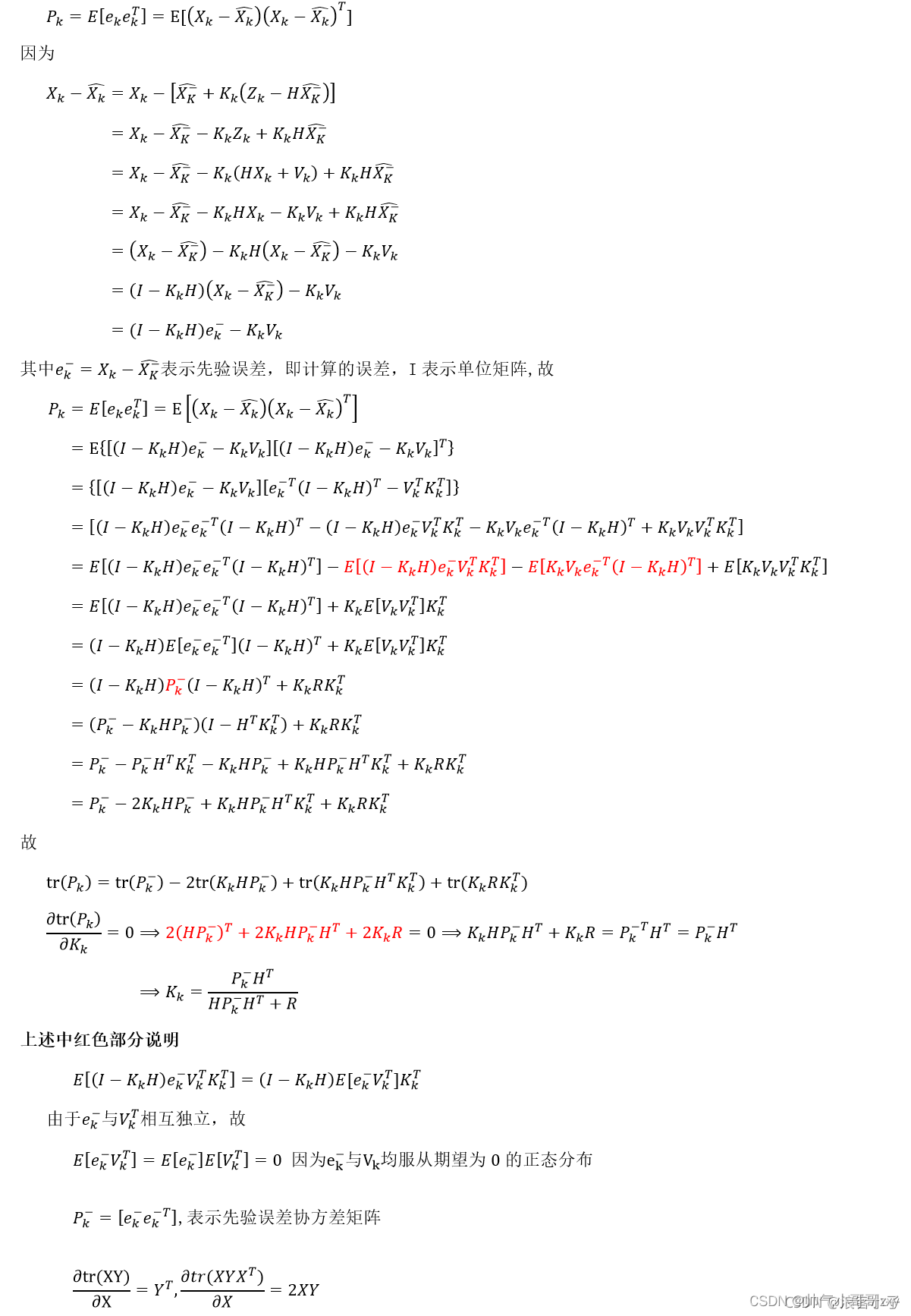
先验误差协方差矩阵
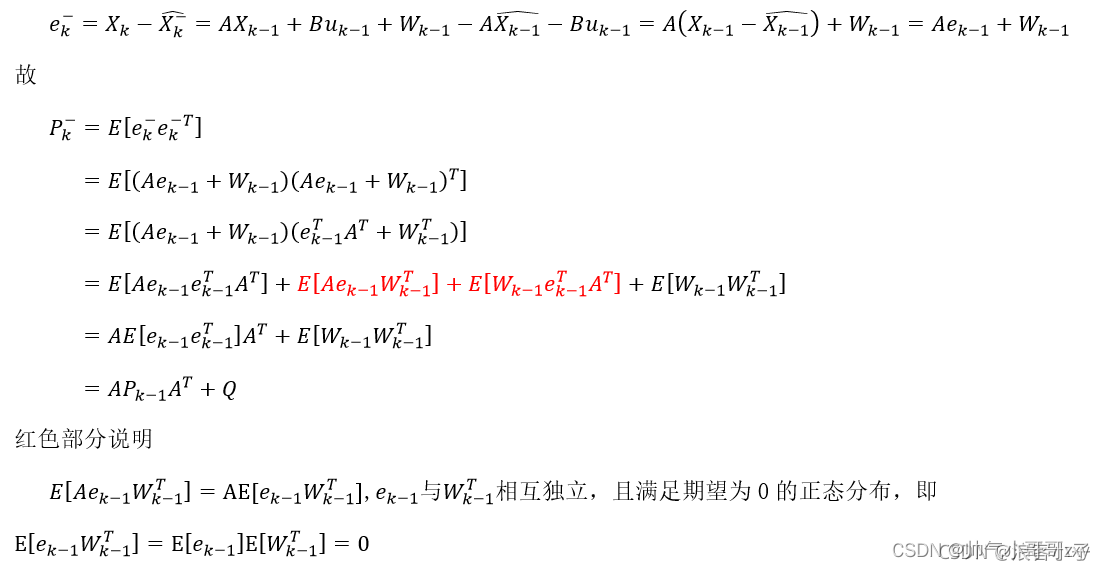
ek的协方差矩阵Pk
由之前的推导可得
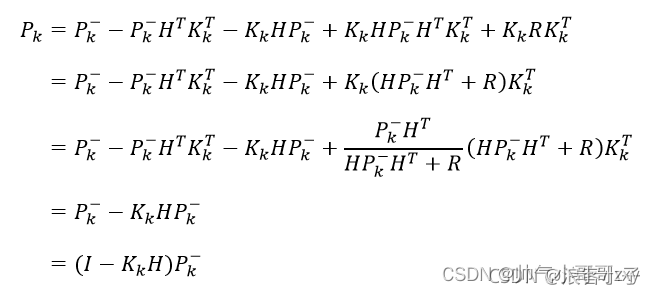
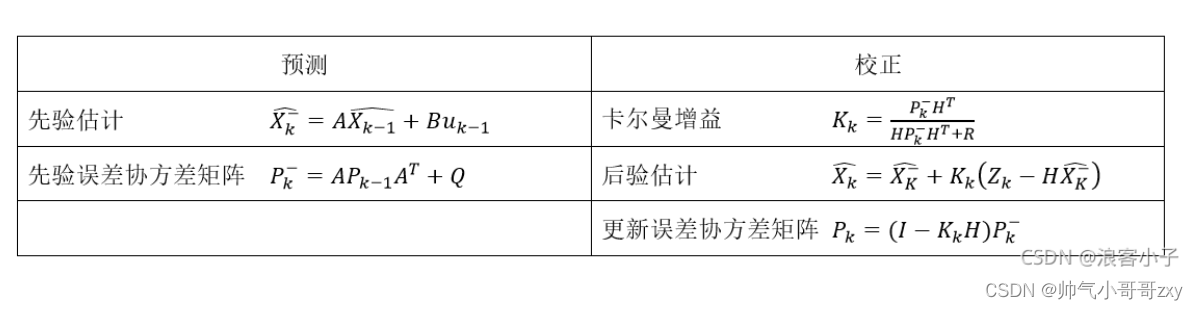
总结:

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









