






今天分享的是人形机器人系列深度研究报告:《人形机器人深度系列报告:机器人运动的心脏电机有望迎来广阔空间》。
(报告出品方:德邦证券)
报告共计:39页

人形机器人可用于日常环境,是国家科技综合水平的重要体现
人形机器人通常用于日常生活环境,协助人类完成复杂和多样的工作。随着工业机器人相关技术的日趋成熟,人们对机器人技术智能化本质的认识日益加深。机器人技术向人类生 产、生活的各个领域的渗透。与工业机器人相对固定的作业环境不同,人形机器人通常使用于人类的日常生活环境中。人形机器人具备类似人类的感知、决策、行为以及拟人化的 移动特性,从外观上更加容易被使用者接受并产生亲切感,因此能够在人类所在的环境中与人类和谐相处,协助人类完成复杂和多样的工作。
人形机器人具有显著的优势,是国家科技综合水平的重要体现。人形机器人又称仿人机器人或类人机器人,指具有人的形态和功能的机器人,具有拟人的肢体、运动与作业技能, 以及感知、学习和认知能力。人形机器人具备人类的外形特征和行动能力,可以采用双腿行走方式,通过手臂和身体的协调完成一些简单的功能,以及通过简单的语言和人类交流。 与传统的机器人相比,人形机器人具有显著的优势。人形机器人建立在多学科基础之上,综合运用机械、电气、材料、传感、控制和计算机来实现拟人化的功能,环境适应更通用、 任务操作更多元、人机交互更亲和,是国际公认的机器人技术集大成者,是一个国家科技综合水平的重要体现。
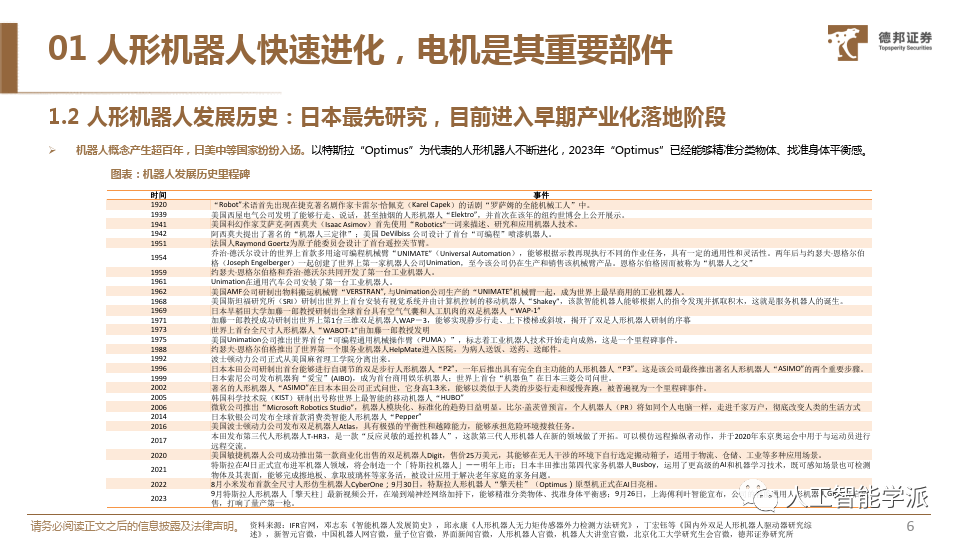
人形机器人发展历史:日本最先研究,目前进入早期产业化落地阶段
商用工业机器人诞生于美国,人形机器人则以日本的研究成果最为瞩目。“Robot”(机器人)一词首先出现在捷克著名剧作家卡雷尔·恰佩克(Karel Capek)的话剧《罗素姆的 万能机器人》中,这是一个源于捷克文“Robota”(劳役、苦工)和波兰文“Robotnik”(工人)的新造词,被用来形容为人类服务的机器奴隶。到了1962年,世界上第一款量 产的实用机器人“VERSTRAN”诞生于美国,与Unimation公司生产的“UNIMATE”机械臂一起,成为世界上最早商用的工业机器人,由此拉开了机器人发展的序幕。而人形机 器人起步于上世纪60年代后期,以日本的研究成果最为瞩目。
人形机器人发展历经四个阶段,目前进入早期产业化落地阶段。根据中国机器人网、顾浩楠《人形机器人历史沿革与产业链浅析》等,人形机器人的发展历程主要分为四个阶段: 第一阶段,是以早稻田大学仿人机器人为代表的早期发展阶段;第二阶段,是以本田仿人机器人为代表的系统高度集成的能力破冰阶段;第三阶段,是以波士顿动力仿人机器人为 代表的高动态运动发展阶段;第四阶段是以特斯拉Optimus机器人为代表的产业化落地阶段,该阶段尚处于发展前期。1973年,日本早稻田大学的加藤一郎教授研发出世界上第 一款人形机器人WABOT-1的WL-5号两足步行机;1986年,日本本田开始进行人形机器人ASIMO的研究,并成功于2000年发布第一代机型;2016年,美国波士顿动力公司发布 双足机器人Atlas,具有极强的平衡性和越障能力,能够承担危险环境搜救任务;2022年9月30日,特斯拉人形机器人“擎天柱”(Optimus)原型机正式在特斯拉AI日亮相,是目前人形机器人最前沿的代表之一。
人形机器人结构:包括执行器、控制器、传感器三大部分
人形机器人主要部件包括电机、减速器、传感器等,力矩电机研制 难度较大。人形机器人发展至今,其本体从部件角度可总体划分为 三块:执行器(伺服系统、减速器、驱动单元等)、控制器(工控系统、人工智能相关系统等)、传感器(本体感受传感器、机器视觉等)。就当下最先进的人形机器人而言,其主要部件包括以下几部分:
1)电机:包括伺服电机、步进电机、力矩电机、球形电机等。其中 力矩电机研制难度较大,但可在中低速运动中提供更高扭矩,适用 于人形机器人低速+高力矩需求;
2)减速器:谐波减速器备受市场关注,因其结构简单、传动比高、 精密度高,但在耐久性等方面还有提升空间;
3)传感器:力矩传感是人形机器人重点使用的关节零部件,并形成 电机—减速机—传感器的关节总成设计;
4)上肢传动方式:滚珠丝杠,通过将滚珠往复运动转化为丝杠直线 运动,相较于皮带、链条等传动方式摩擦小、运维成本低;
5)下肢传动方式:行星滚柱丝杠,耐外力冲击、寿命较长;
6)手部关节:空心杯电机,设计不复杂。
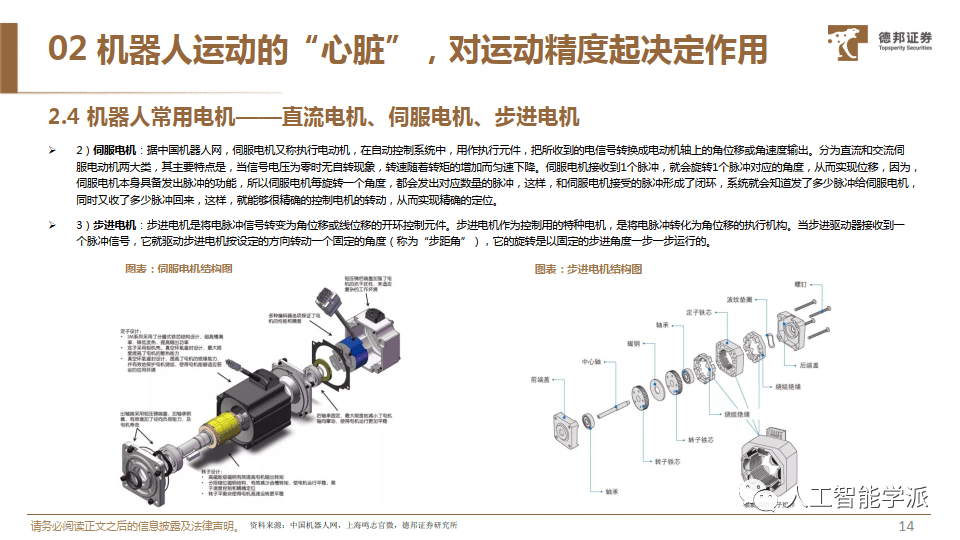
电机驱动更注重“智能”,机器人对伺服电机要求高
电机驱动更注重“智能”,运动控制精度有很大保障。机器人关节驱动器是双足人形机器人关键部件,按动力来源可以分为液压、气动、电机驱动、记忆金属、生物类(心肌细胞) 等,其中电机驱动和液压驱动是较为常见的两种形式,如美国波士顿动力机器人主要采用高爆发液压伺服技术,更注重“力量”;特斯拉机器人主要采用高扭矩密度电机伺服技术, 更注重“智能”。电机方案的优势在于,在运动控制方面,其设计比液压控制有更成熟的解决方案,处理器编码器也相对更容易正确获取运动状态的实时反馈,控制精度也有很大 保障,而且相较液压成本便宜了很多。
电机是机器人执行机构,机器人对伺服电机要求高。机器人电动伺服驱动系统是利用各种电动机产生的力矩和力,直接或间接地驱动机器人本体以获得机器人的各种运动的执行机 构。机器人对伺服电机的要求比较高:首先要求伺服电机具有快速响应性;其次,伺服电机的起动转矩惯量比要大。在驱动负载的情况下,要求机器人的伺服电机的起动转矩大, 转动惯量小;最后,伺服电机要具有控制特性的连续性和直线性,随着控制信号的变化,电机的转速能连续变化。同时为了配合机器人的体形,伺服电机必须体积小、质量小、轴向尺寸短。还要经受得起苛刻的运行条件,可进行十分频繁的正反向和加减速运行,并能在短时间内承受数倍过载。





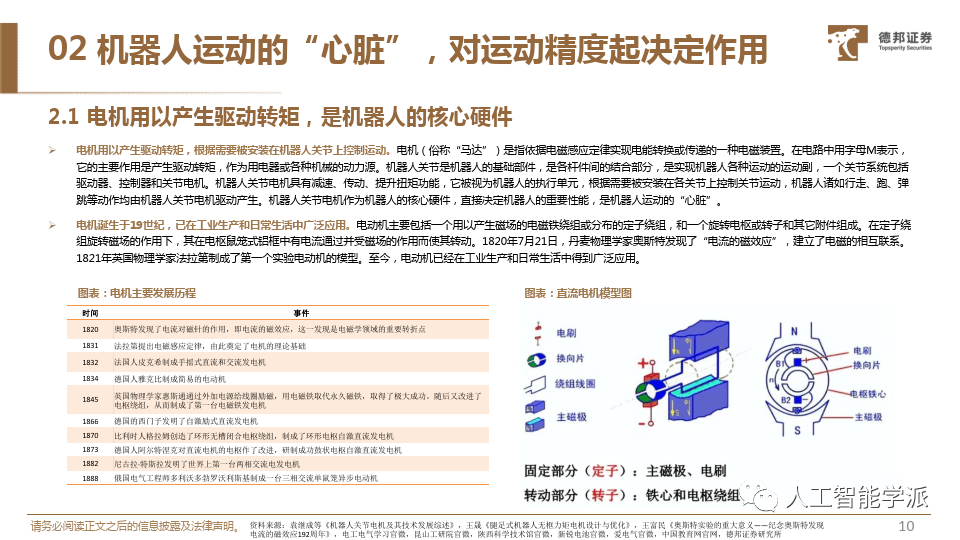
电机用以产生驱动转矩,是机器人的核心硬件
电机用以产生驱动转矩,根据需要被安装在机器人关节上控制运动。电机(俗称“马达”)是指依据电磁感应定律实现电能转换或传递的一种电磁装置。在电路中用字母M表示, 它的主要作用是产生驱动转矩,作为用电器或各种机械的动力源。机器人关节是机器人的基础部件,是各杆件间的结合部分,是实现机器人各种运动的运动副,一个关节系统包括驱动器、控制器和关节电机。机器人关节电机具有减速、传动、提升扭矩功能,它被视为机器人的执行单元,根据需要被安装在各关节上控制关节运动,机器人诸如行走、跑、弹 跳等动作均由机器人关节电机驱动产生。机器人关节电机作为机器人的核心硬件,直接决定机器人的重要性能,是机器人运动的“心脏”。
电机诞生于19世纪,已在工业生产和日常生活中广泛应用。电动机主要包括一个用以产生磁场的电磁铁绕组或分布的定子绕组,和一个旋转电枢或转子和其它附件组成。在定子绕 组旋转磁场的作用下,其在电枢鼠笼式铝框中有电流通过并受磁场的作用而使其转动。1820年7月21日,丹麦物理学家奥斯特发现了“电流的磁效应”,建立了电磁的相互联系。 1821年英国物理学家法拉第制成了第一个实验电动机的模型。至今,电动机已经在工业生产和日常生活中得到广泛应用。
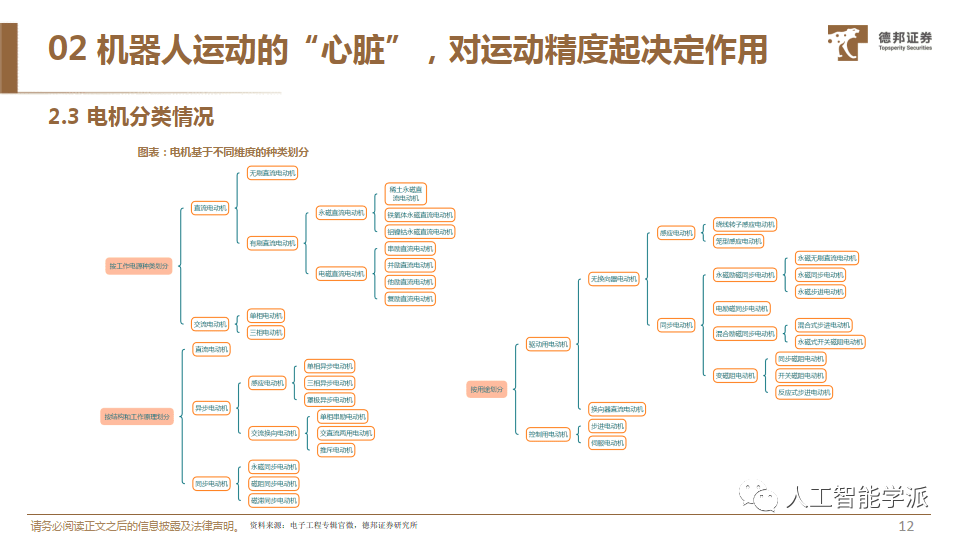
电机有多种类型,可与其他零部件集成减少整体体积
电机有多种类型,一般包括定子和转子。基于不同的维度,如使用范围、结构特点等,电机有不同的分类,如按工作电源种类划分,可以分为直流电机、交流电机;按结构和工作 原理划分,可以分为直流电机、异步电机、同步电机;按用途划分,可以分为驱动用电机、控制用电机等等。以直流电机为例,电机结构上一般包括定子和转子,电机工作时不转 动的部分称为定子,而始终处于旋转状态的部分称为转子。转子是直流电机能够进行两种能量转换的核心枢纽,因此转子也称为电枢。与直流电机类似,交流电机也是由定子、转 子、机壳及其它的辅助零件组成,核心部件为定子和转子。
电机可以单独存在,也可集成减少整体体积。电机可以作为一个单独的零件存在,但有些时候也会和其他零件集成到一起,有利于减小整体体积,比如电动车上经常用到三合一电 驱动,是将电机、减速器、电机控制器集成到一起,减小了整体的体积和重量,提高空间利用率;在电动车上甚至有六合一电驱动(电机、减速器、电机控制器、DC/DC、充电机、 配电盒)、八合一电驱动(电机、减速器、电机控制器、DC/DC、充电机、配电盒、电池管理器、整车控制器)等。
特斯拉人形机器人内置3种线性执行器及3种旋转执行器,全身28个关节
Optimus共有28个执行器,线性及旋转各14个。对于双足人形机器人而言,要完成基本行走与抓取等常规动作,通常需要30~40台直流伺服电机。同时伺服电机还需要满足体积 小,高爆发、高功率以及高密度等特点。特斯拉Optimus(擎天柱)内置3种线性执行器及3种旋转执行器。其中线性执行器14个,主要包括无框力矩电机+行星滚柱丝杠;旋转执 行器14个,主要包括无框力矩电机+谐波减速器,合计共有28个运动关节执行器。
28个执行器分布于肩、肘、腕、躯干、髋、膝、踝等部位。根据2022特斯拉AI day的展示,28个执行器分布在:
①肩部6个(旋转×6);
②肘部2个(直线×2);
③腕部6个(旋 转×2+直线×4);
④躯干2个(旋转×2);
⑤髋部6个(旋转×4+直线×2);
⑥膝部2个(直线×2);
⑦踝部4个(直线×4)。
无框力矩电机体积小、便于集成,适用于机器人关节环境
无框力矩电机属于伺服电机,质量轻、体积小、便于集成。无框力矩电机属于伺服电机的一种,是由一组转子和定子组成的部件,是构成电机的永磁体和电磁体。相对于传统的伺 服电机,无框力矩电机没有确定的固定单元,可以自由地适配不同客户的外壳、轴承以及反馈装置等部件的集成安装,具有整体质量更轻、体积更小、运动响应更快及能效高等特 点,被广泛应用于汽车、航空航天、机器人、医疗器械、半导体等领域。
配置灵活,安装方便,适用于机器人关节。无框力矩电机没有机壳,只有定子和转子2个部件,转子通常是内部部件,由带永磁体的旋转钢圆环组件构成,直接安装在机器轴上。 定子是外部部件,包含有齿钢叠片,外面包裹着能产生电磁力的铜绕组。定子紧凑地安装在机器外壳的主体内。相较于有框电机,无框电机配置灵活,安装方便,着眼于目前驱动 系统的高度集成化趋势,无框电机更贴合工程师的目标期望;工程师无需像传统设计那样考虑电机接口,只需要在系统设计中给予电机相当小的空间位置预留即可,可以最大限度 的缩小驱动系统中动力输出单元的空间占用,以此来达到更高的系统集成。
空心杯电机是灵巧手关键部件,具有良好的节能效果、动力性能及控制性能
人形机器人手指空间狭小,空心杯电机是关键零部件。空心杯电机是人形机器人灵巧手的关键零部件。对于人形机器人而言,其手指空间狭小,因而人形机器人手指关节需配备更 多小型化且能够输出较大力的电机,属于直流永磁伺服电动机的空心杯电机完美契合人形机器人对应手指关节轻量化、高精度等需求。目前以特斯拉为代表的着力于人形机器人量产化的企业主要采用了空心杯电机方案。
效率高、转速快、响应快,空心杯电机具有良好的节能效果、动力性能及控制性能。空心杯电机在结构上突破传统电机的转子结构形式,采用了无铁芯转子,也叫空心杯型转子, 这种新颖的转子结构彻底消除了因铁芯形成涡流而造成的电能损耗。同时空心杯电机重量和转动惯量大幅降低,从而减少转子自身的机械能损耗。由于转子结构变化而使电机的运 转特性得到极大改善,不但具有突出的节能特点,更为重要的是具备了铁芯电机所无法达到的控制和拖动特性。空心杯电机为微特电机,具有突出的节能特性、灵敏方便的控制特 性和稳定的运行特性,技术优势明显。作为高效率的能量转换装置,在很多领域代表了电动机的发展方向。
特斯拉人形机器人手部构造
特斯拉Optimus手部设计参数:单手6个执行器、11个自由度、自动适应抓取物体、无法逆向驱动手指。
特斯拉Optimus手部性能:携带一个20磅的袋子、可以使用工具、对小零件进行精确抓握。



AI助力+政策支持,人形机器人有望迎来历史性发展机遇
多地发布支持政策,人形机器人有望迎来历史性发展机遇。近期多地发布政策支持人形机器人的发展,6月北京市人民政府办公厅印发《北京市机器人产业创新发展行动方案 (2023-2025年)》提出,着眼世界前沿技术和未来战略需求,加紧布局人形机器人,带动医疗健康、协作、特种、物流四类优势机器人产品跃升发展,实施百项机器人新品工程, 打造智能驱动、产研一体、开放领先的创新产品体系。上海、深圳、山东等地今年以来也都发布了关于人形机器人的支持政策,人形机器人在工业、医疗、家庭服务等领域具有巨 大应用空间,随着各项重磅政策接踵而至,人形机器人产业链或迎来历史性发展机遇。
具身智能时代开启, AI助力人形机器人向前迈进。人形机器人作为通用机器人的代表和具身智能的优秀载体,一方面正在受益于通用人工智能的发展,另一方面,也以“具身智 能”成为AI与物理世界的接口,和下一代通用人工智能的终端平台。AI大模型在机器人任务中主要扮演了推理决策的角色,将人类给出的自然语言指令拆解为机器人可执行的步骤。 多模态的AI大模型补全了机器人核心的推理决策能力,有望助力人形机器人走向通用之路。

核心零部件是人形机器人产业链主要上游,电机成本占比较高
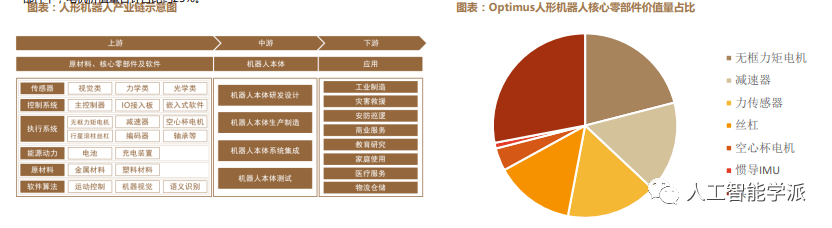
产业链包括上游零部件、中游本体及下游应用,相比常规机器人技术要求更高。人形机器人产业链主要包括上游的核心零部件,例如无框力矩电机、空心杯电机、传感器、专用芯 片等;中游为机器人本体制造,包括设计、制造、测试三大环节;下游为人形机器人应用领域,包括工业制造、仓储物流、医疗服务、商业服务、家庭使用等。从技术上来看,相较于常规机器人,人形机器人涉及学科广泛,技术更加复杂,对机械结构和执行器、控制系统、传感器、人工智能、人机交互、能源管理、机器视觉等核心技术都有着极高的要求。
核心零部件是人形机器人的重要支撑,电机在核心零部件中占比较高。核心零部件供给是未来机器人产业规模化发展的重要支撑,人形机器人三大核心零部件包括减速器、伺服系 统和控制器,成本合计占比超70%。根据前瞻网,以特斯拉Optimus为例,2023年人形机器人核心零部件价值量排名前三的是无框力矩电机、减速器和力传感器;到2030年,无 框力矩电机价值量占比或将下降,力传感器、减速器价值量占比上升,且力传感器预计将超过减速器,排名第二,三者合计占比仍将超过50%。目前在Optimus人形机器人核心零 部件中,电机价值量合计占比约25%。
人形机器人需求有望超汽车,百万台出货假设下电机增量市场近千亿
人形机器人需求有望超汽车,远期全球市场空间或超万亿。考虑到成本价格、空间体积以及功能场景等方面,人形机器人相对汽车硬件成本构成方面更低,应用场景更丰富,预估 其成熟阶段年出货量规模将大于汽车。同时由于价格高出电脑一至两个数量级,且对空间要求更高,其市场数量规模和渗透速度可能低于电脑,但市场价值规模会远大于电脑。根 据中国汽研政研咨询中心,2022年全球汽车销量约8163万辆;此外马斯克在2023年特斯拉股东大会上曾表示,人形机器人Optimus未来可能的市场需求在100亿台,且达到预计 数百万量产规模后,机器人每台售价会大大低于汽车,预计低于2万美元。若机器人销量达到2022年汽车销量,人形机器人全球市场空间或将超过1.6万亿美金。
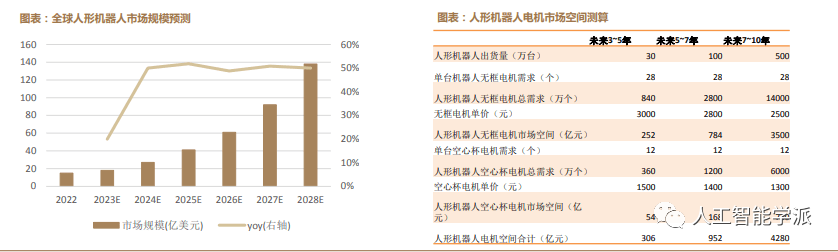
人形机器人百万台出货量假设下,电机增量市场接近千亿。根据中商产业研究院,2022年全球人形机器人市场规模达到15亿美元。人形机器人在全球范围内处于高速发展阶段, 未来市场增长潜力巨大,到2028年人形机器人市场规模将增至138亿美元,5年内年均复合增长率达50.29%。假设未来10年全球人形机器人出货量达到500万台,无框电机单价 2500元、空心杯电机单价1300元,则10年后人形机器人带来的无框电机增量市场有望为3500亿元,空心杯电机增量市场有望为780亿元,合计4280亿元市场空间。















 995
995











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









