






ubnutu下经常用到ROS,ubnutu20.04安装ros时自带opencv4.2,但是很多工程用到的opencv都是低版本opencv3系列,比如vins-mono就依赖opencv3。
虽然很多教程说在CMakeLists指定opencv版本,但是会出现很多问题:
error: ‘CV_RGB2GRAY’ was not declared in this scope
或者警告
/usr/bin/ld: warning: libopencv_calib3d.so.3.3, needed by /home/gl/SLAM/pl_vins_ws/devel/lib/libcamera_model.so, may conflict with libopencv_calib3d.so.4.2
解决各种bug虽然编译没问题了,但是运行不了。
究其原因,是因为在安装ROS时,cv_bridge默认连接了4.2版本的opencv进行编译。只修改CMakeLists中opencv的路径,编译可能没问题,但在代码执行时如果引用到libcv_bridge.so,还是会链接到opencv原来的版本。
解决方案
重新安装cv_bridge这个包
1.卸载原来版本的cv_bridge(也可以不卸载)
sudo apt-get remove ros-noctic-cv-bridge
2.去下载最新的cv_bridge包,直接下载对应ros版本的,比如noctic就下载这个
GitHub - ros-perception/vision_opencv

3.更改对应的cv_bridge
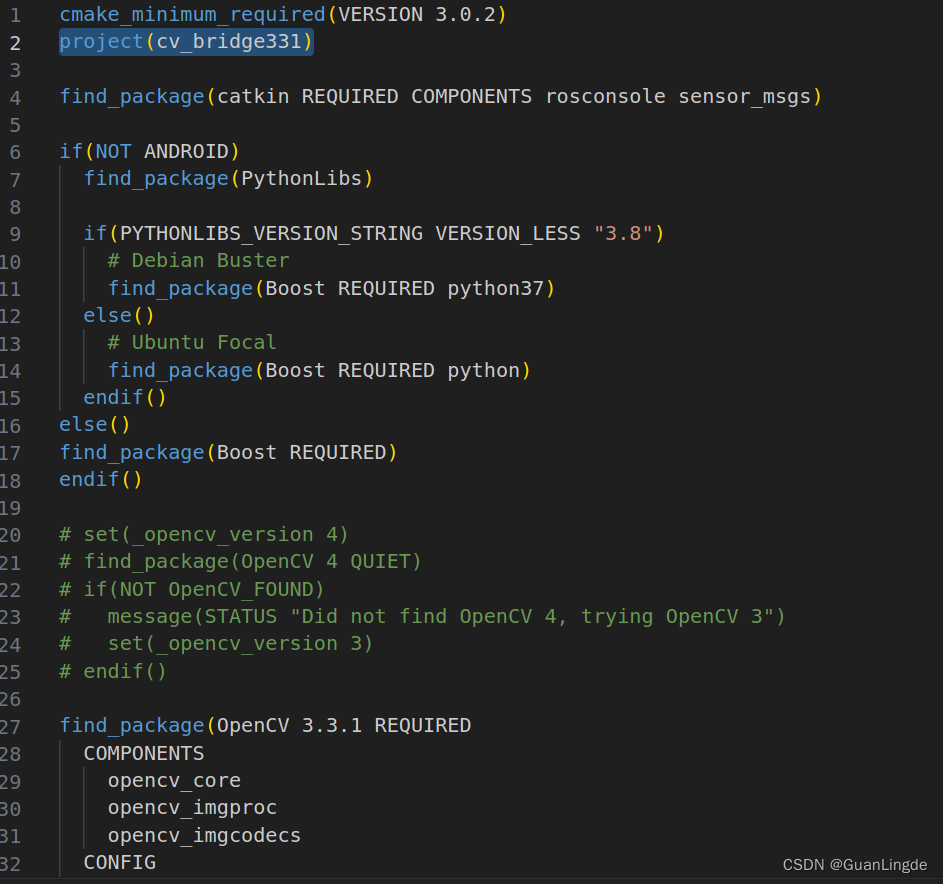
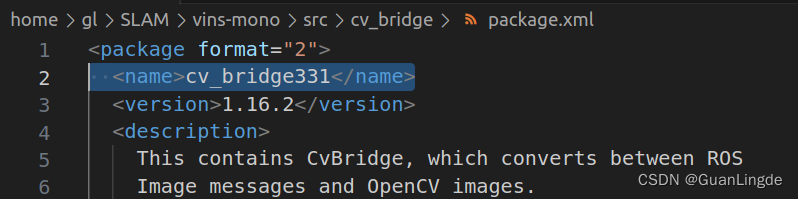
打开下载的包,打开cv_bridge,编辑CMakeLists里内容,将里面opencv部分替换为自己安装的opencv,并且把工程项目名改成cv_bridge331(对应opencv的版本,便于区分),package.xml中也需要改成cv_bridge331.
4.编译工作空间,例如vins-mono工作空间:
复制刚才更改的cv_bridge到vins-mono的src下(注意此时src里不能有vins-mono的源码)
然后在vins-mono的工作空间下执行catkin_make命令,这一步就是为了先编译cv_bridge331,这样就会使编译vins-mono源码时优先使用自己编译的cv_bridge331,编译后source下环境变量。
然后把vins-mono的源码下载到src下,跟cv_bridge在同一级。
接下来在vins-mono的Cmakelists.txt中指定自己的opencv包和路径以及cv_bridge改成cv_bridge331,保存。
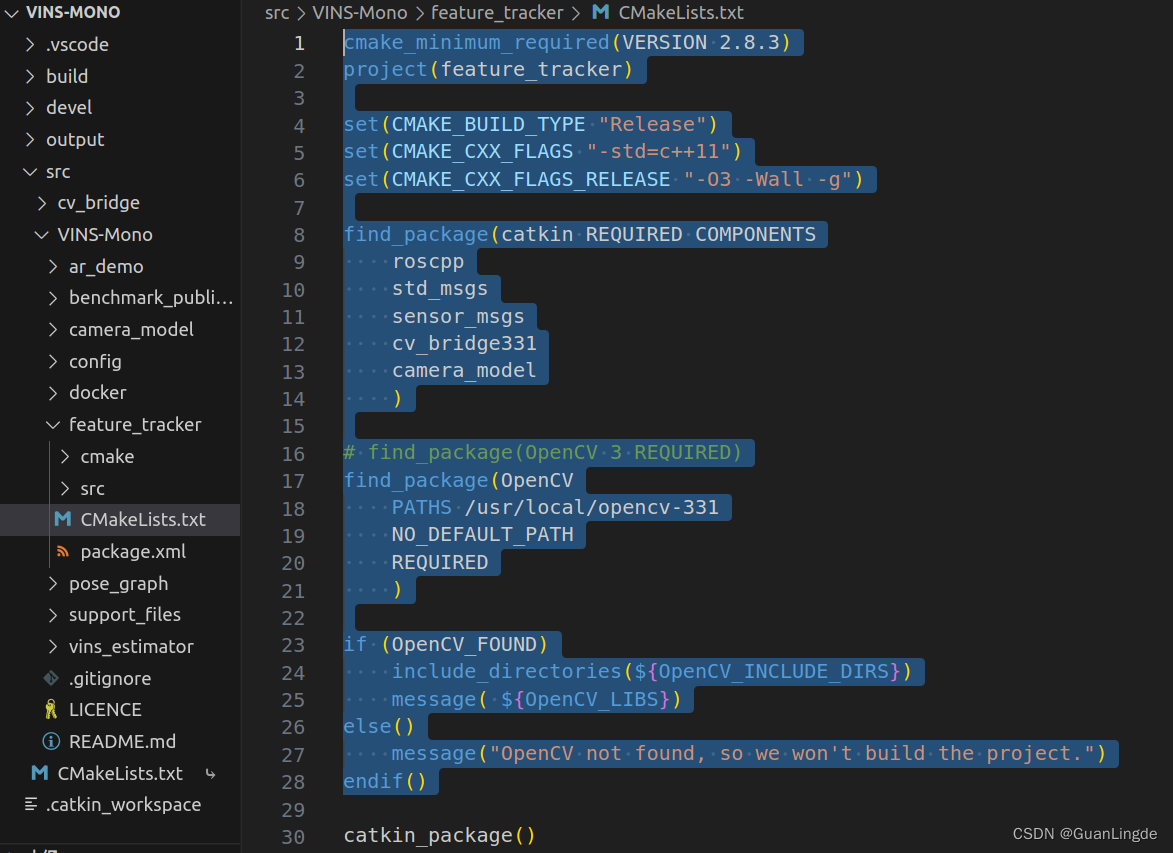
所有用到opencv的地方都改掉。
然后再次在vins-mono工作空间执行catkin_make命令编译vins-mono源码,经过上面操作就不会编译有警告,也能正常运行。
编译完成后再source一下环境变量。
















 2417
2417











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









