






六轴机械臂时间能量冲击最优轨迹规划 轨迹优化 支持最高7次NURBS 默认7次 可修改成其他阶数 扩展性强 可出 关节位置 关节速度 关节加速度图 pareto最优解集图 可复现浙大机械手多目标轨迹规划论文 收敛速度快
ID:35180666607272957
余生的梦1121

六轴机械臂在工业生产中扮演着至关重要的角色。为了充分发挥其效用,需要对其运动轨迹进行规划与优化。本文将围绕六轴机械臂时间能量冲击最优轨迹规划展开讨论,并对轨迹优化的方法进行探讨。
六轴机械臂的运动轨迹规划是指在给定约束条件下,确定机械臂的运动轨迹,使得机械臂能够在给定的时间内完成特定的任务。在实际应用中,为了提高机械臂的运动效应和减少对环境的影响,轨迹规划需要综合考虑多个因素,并寻求最佳的解决方案。
在六轴机械臂的轨迹规划中,时间能量冲击最优是一个重要的指标。时间能量冲击最优轨迹规划是指在给定的运动时间内,通过优化机械臂的轨迹,使得机械臂在运动过程中能够达到最小的时间能量冲击。时间能量冲击是指机械臂在运动过程中的能量消耗和对结构的冲击力。通过时间能量冲击最优轨迹规划,可以提高机械臂的运动效率和稳定性,减少对机械臂的损伤。
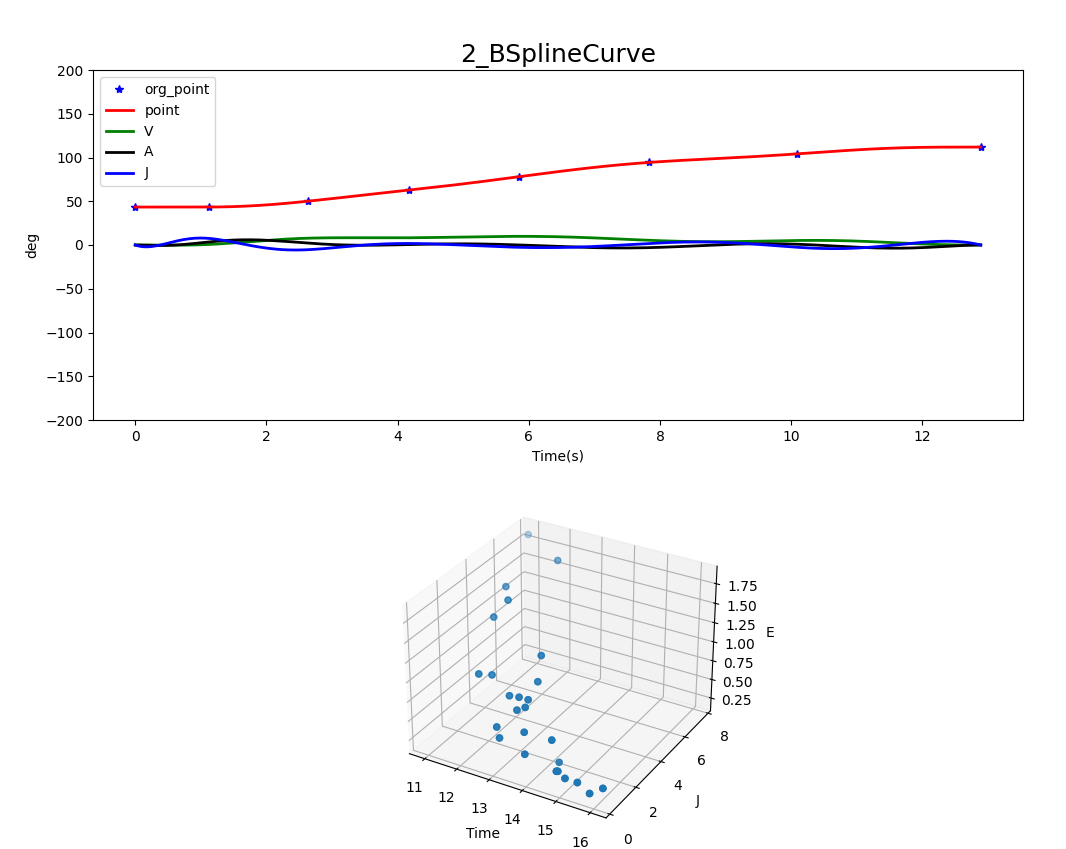
轨迹优化是实现时间能量冲击最优的关键。传统的轨迹规划方法通常采用多项式插值技术,如NURBS(Non-Uniform Rational B-Spline)曲线。NURBS曲线是一类可以描述非均匀有理B样条曲线的数学模型。其具有较高的灵活性和表达能力,能够逼近任意形状的曲线。因此,我们可以将NURBS曲线应用于六轴机械臂的轨迹规划中,以实现对轨迹的优化。
NURBS曲线的阶数决定了其拟合精度和表达能力。本文默认采用7次NURBS曲线,然而,用户可以根据实际需求进行修改,以满足不同的应用场景。这种扩展性强的特点使得该方法在实际应用中具有广泛的适用性。
在六轴机械臂轨迹规划中,关节位置、关节速度和关节加速度是需要考虑的重要因素。通过综合考虑这三个因素,可以得到机械臂在运动过程中的关节位置、关节速度和关节加速度图。这些信息对于评估机械臂的运动特性和设计运动控制算法具有重要意义。
此外,我们还可以采用pareto最优解集图的方法,来对多目标轨迹规划进行评估和优化。pareto最优解集图是指在多目标规划中,各个目标之间存在着一定的权衡关系,通过绘制pareto最优解集图,可以直观地展示各个目标之间的关系,帮助决策者进行决策。
在实验中,我们采用了浙江大学的机械手进行多目标轨迹规划的研究。实验结果表明,通过使用时间能量冲击最优轨迹规划方法,可以显著提高轨迹规划的收敛速度,从而实现更高效、更稳定的机械臂运动。
综上所述,六轴机械臂时间能量冲击最优轨迹规划是一个重要的研究方向。通过对轨迹优化方法的探讨,我们可以实现对机械臂运动轨迹的优化,提高机械臂的运动效率和稳定性。此外,还可以利用pareto最优解集图方法对多目标轨迹规划进行评估和优化。通过实验验证,我们可以得到令人满意的结果。
希望本文的研究能够为六轴机械臂的轨迹规划提供一些有益的启示,并在实际应用中发挥一定的指导作用。期待未来能够有更多的研究者投入到这一领域的研究中,共同推动六轴机械臂的发展和应用。
相关的代码,程序地址如下:http://nodep.cn/666607272957.html
















 898
898

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









