







MoveIt + Gazebo 仿真 ‘position_controllers/JointTrajectoryController’ dose not exist.
通过 MoveiIt Setupassistance 配置助手对机器人进行配置后,修改关节的控制器类型并设定相应的控制器后,启动机器人的 MoveIt + Gazebo 仿真命令如下:
roslaunch xxx_moveit_config demo_gazebo.launch
终端反馈如下图:
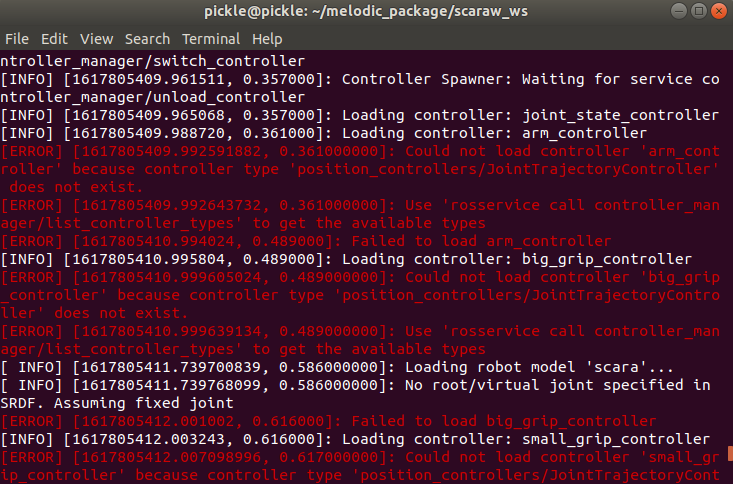
提取关键错误信息,提示启动 arm_controller 失败,其主要原因定位为缺 JointTrajectoryController
Could not load controller 'arm_controller' because controller type 'potion_controllers/JointTrajectoryController' dose not exist.
解决方案如下:
在终端键入如下命令进行 JointTrajectoryController 功能包补全
sudo apt-get install ros-melodic-joint-trajectory-controller















 553
553











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









