






1.Ubuntu20.04 安装流程
(1)准备工具
U盘(提前备份好U盘里的文件)、电脑
了解自己品牌电脑进入bios的快捷键
(2)下载Ubuntu系统镜像
登录Ubuntu20.04LTS镜像网站:
Index of /ubuntu-releases/20.04/ | 清华大学开源软件镜像站 | Tsinghua Open Source Mirror
下载ubuntu-20.04.5-desktop-amd64.iso(下载位置自选)
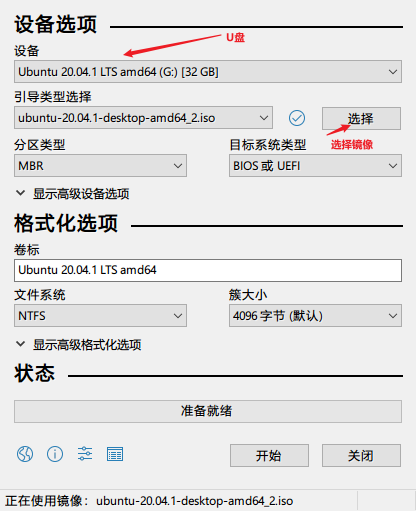
(3)下载镜像文件写入工具&制作启动盘
版本看个人选择,我参考的版本选择的是rufus-3.10.exe,不太清楚不同版本的烧录工具对安装有没有影响
插入U盘、双击下载好的软件,设备选项中,“设备”选择插入的U盘,“引导类型选择”选择上一步下载的系统镜像,点击开始。
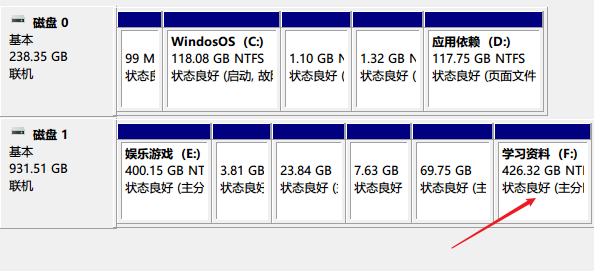
(4)Windows分区
上一步完成后回到桌面,单击“此电脑”,右键选择管理,选中磁盘管理。
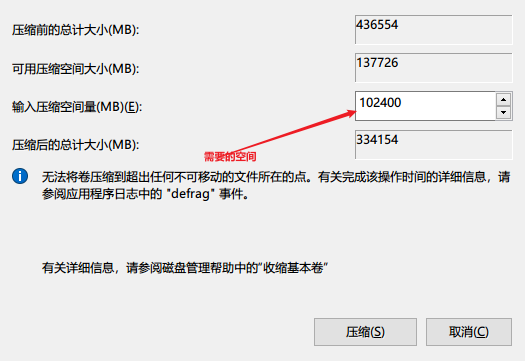
选中一个有足够空间的硬盘,右键点击压缩卷,在“输入压缩空间量”一栏输入需要的空间(最好多留一些,省的后面空间不足)。设置好之后点击“压缩”。
(5)安装Ubuntu
1、把U盘插入电脑USB接口
2、重启电脑
3、在电脑进入启动界面后通过快捷键进入BIOS
4、在BIOS里把启动方式设置为优先U盘启动,路线为:将引导模式(boot mode)修改为uefi模式-->在启动设置/选项中,将U盘的启动优先级调整到最高,保存修改,这样设置后计算机就会优先从U盘启动,进入Ubuntu的安装界面。
由于不同品牌的电脑BIOS界面也不一致,具体如何设置可以在网上搜索(但是设置路线应该是一样的)。
保存后计算机会再次启动进入U盘引导项。正常的话就会进入Ubuntu的启动界面了
这里再推荐另一种优先从U盘启动的方法(亲测有用),在windows桌面,按住shift,之后点击重启,接下来会出现蓝色的“使用设备”界面,选择自己的U盘(后缀应该是Removable Device),然后就直接从U盘启动了。
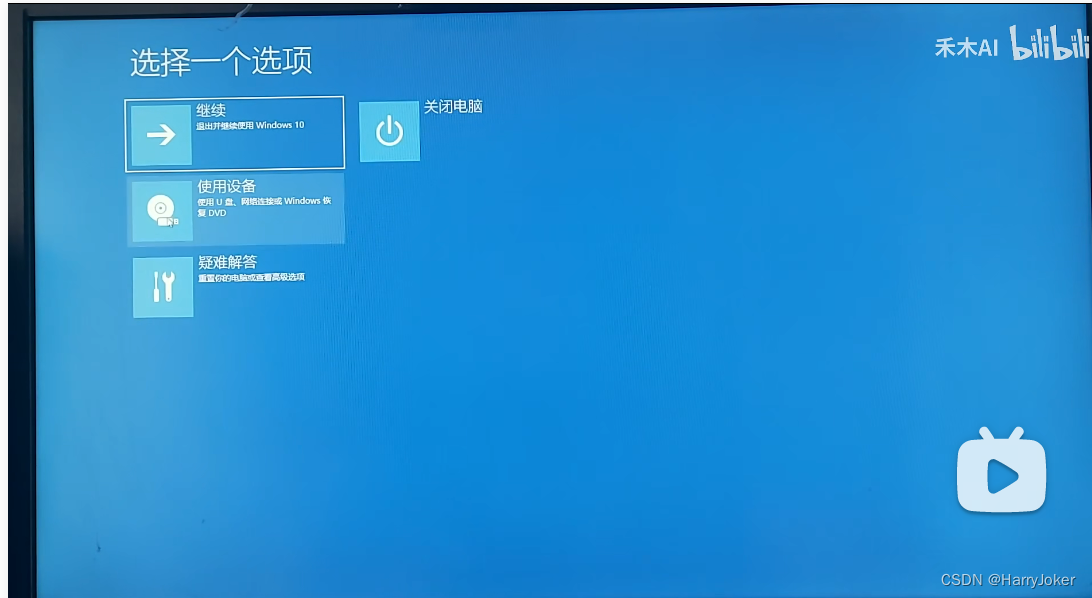
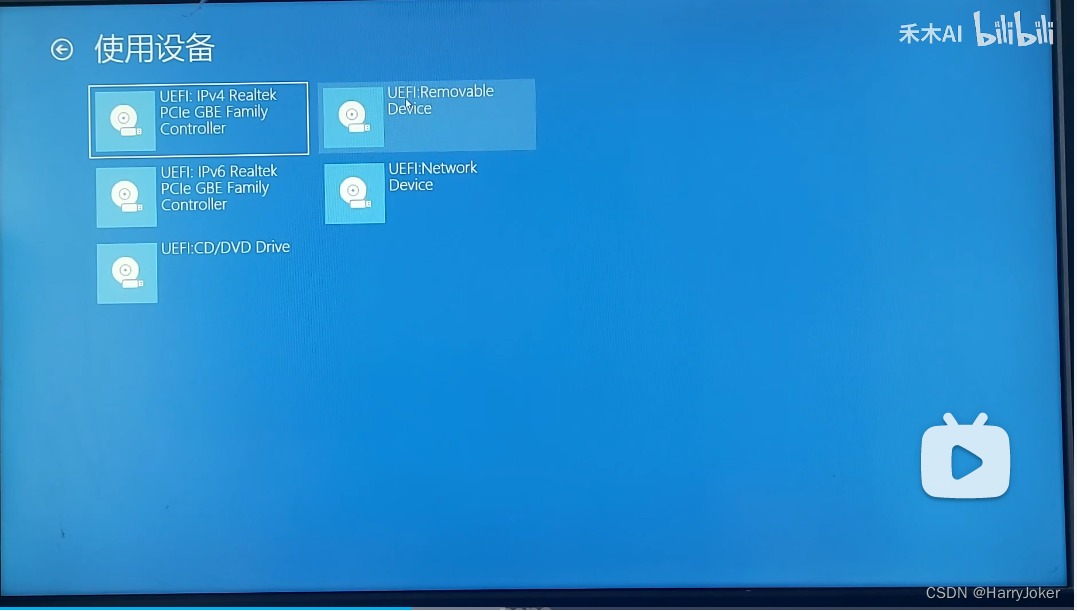
以上两个方法有一个好使就行。
(6)引导界面设置
1、选择语言:中文简体

2、点击界面右侧“安装Ubuntu”
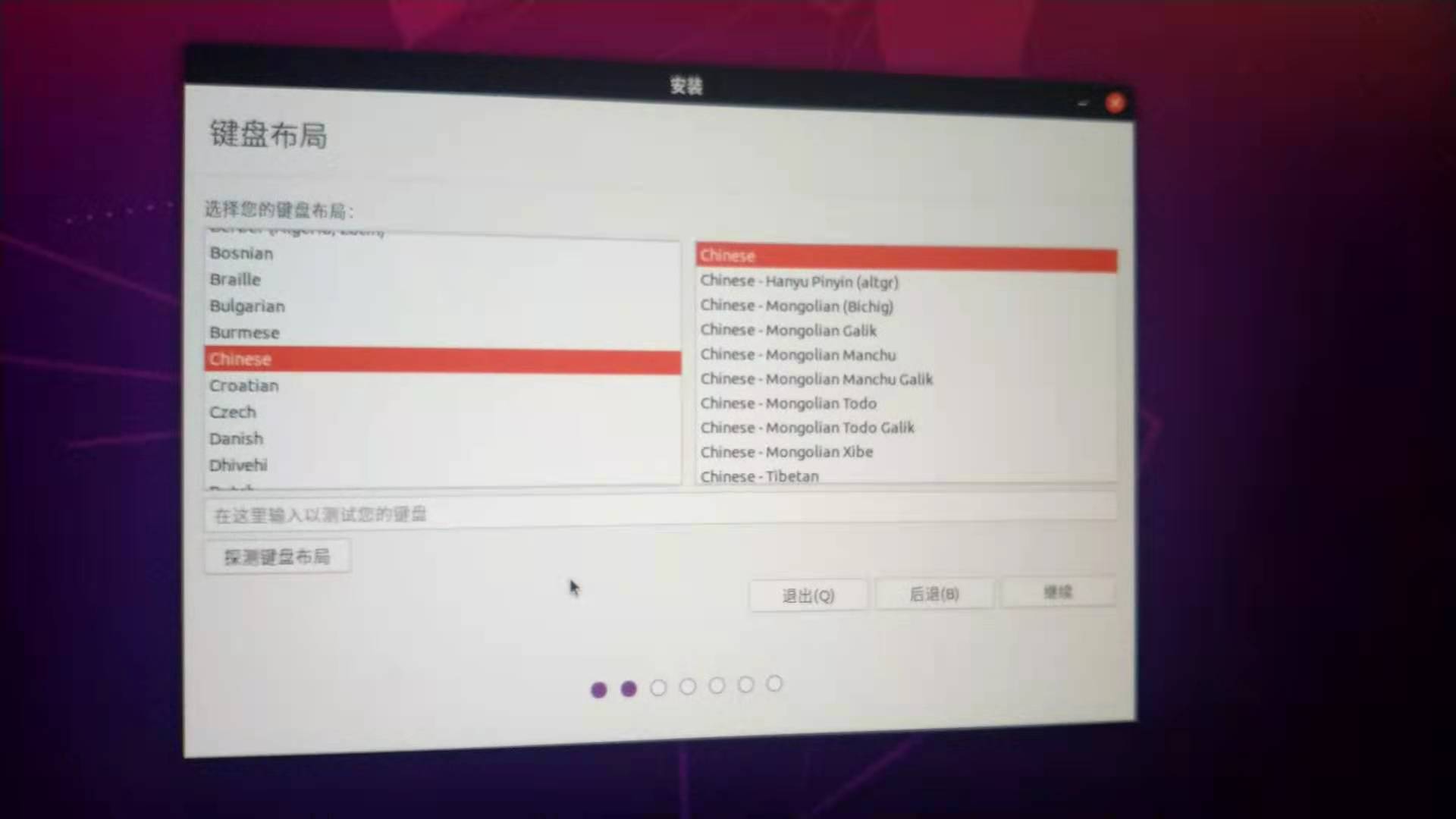
3、键盘布局选择English(US)-English(US)
4、选择无线网络
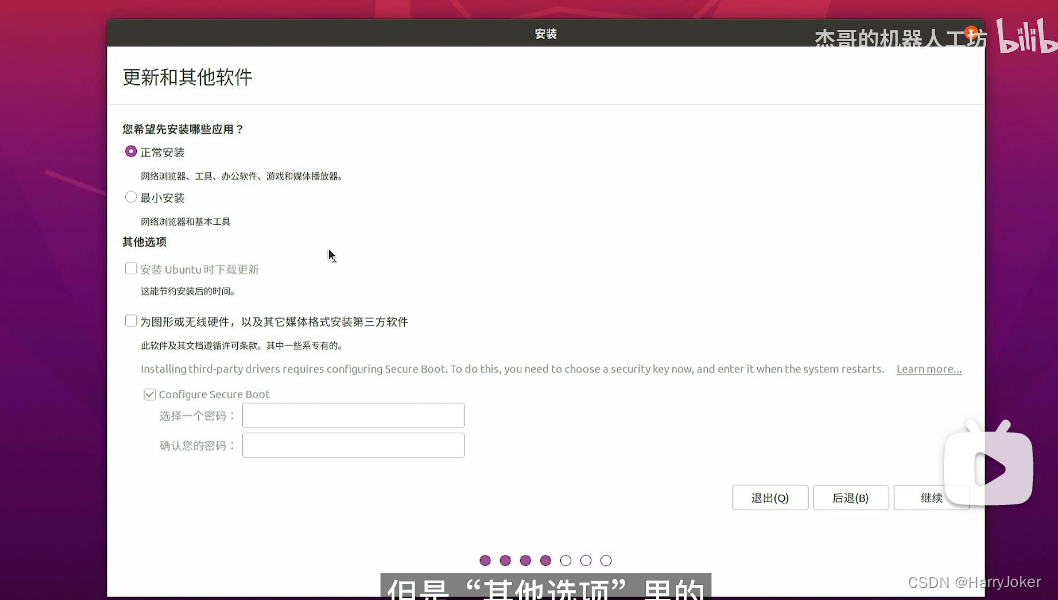
5、“更新和其它软件”界面选择正常安装,取消勾选“安装Ubuntu时下载更新”,点击“继续”
6、“选择安装类型”界面选择“其它选项”
6.1、分区方法:
选中空闲分区,点击左下角“+”,会弹出创建分区的小窗口
“新分区的类型”均选择“逻辑分区”
“新分区的位置”均选择“空间起始位置”
参考6.2的分区安排,分别给上面四个区分配适当的大小。
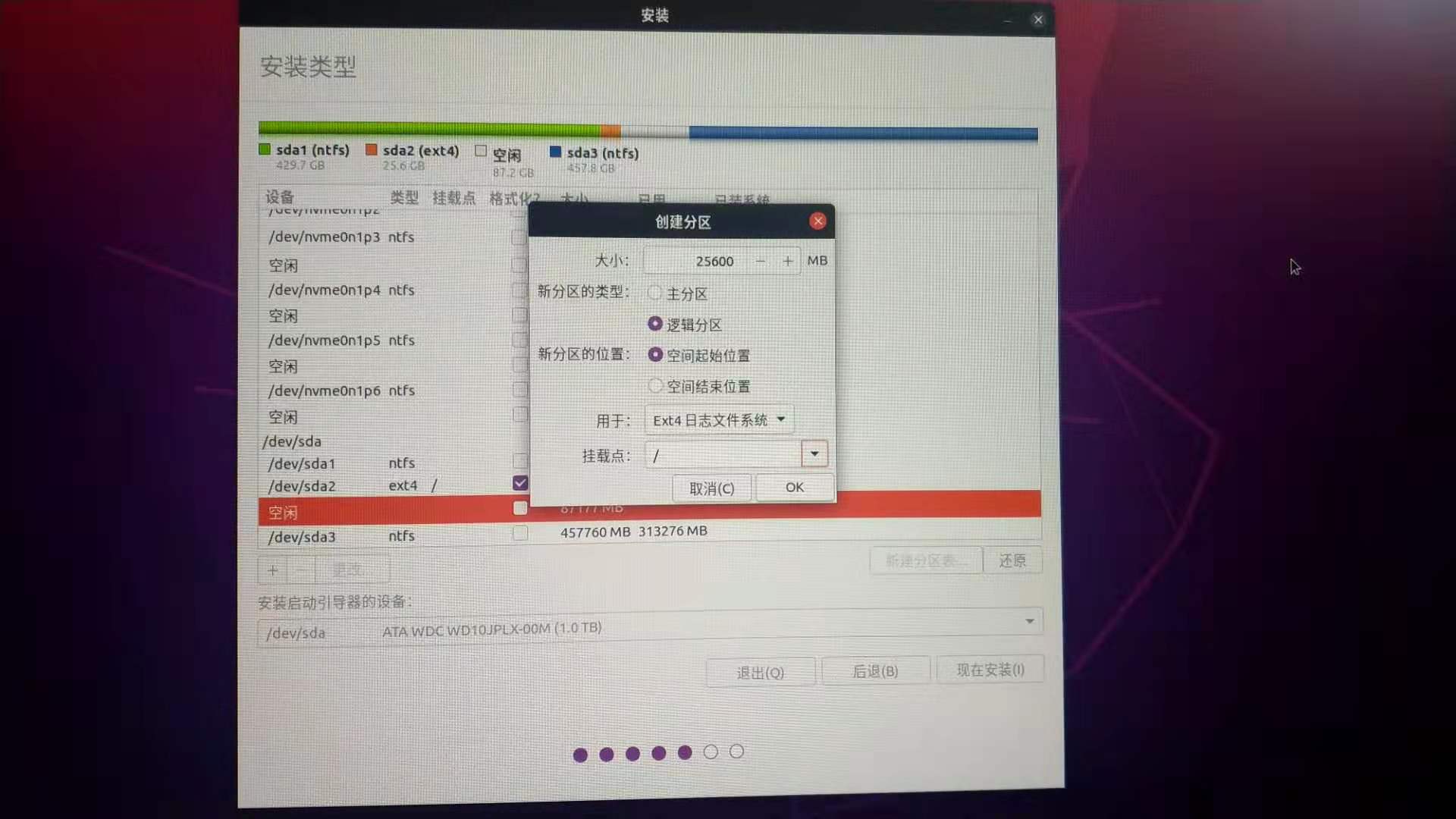
6.2、分区设置:
/根目录系统大区推荐15G以上:“用于”一栏选择“Ext4日志文件系统”,挂载点选择“/”;
/boot启动目录(200M-2G):“用于”一栏选择“Ext4日志文件系统”,挂载点选择“/boot”;
/swap交换分区(一般和内存一样大,或者稍小一些):“用于”一栏选择“交换空间”;
/home目录给的越多越好(因为要用来存放程序,数据集等文件):“用于”一栏选择“Ext4日志文件系统”,挂载点选择“/home”;
推荐/最好不少于25G
(7) 其它设置
选择时区:点击中国地图,Shanghai,点击“继续”。
设置账户:“您的姓名”、“您的计算机名”自定义,最好选短一点的。账户的其余信息的都可以自己定义(密码以后安装依赖、库的时候都要用,最好别设置的太复杂),点击“继续”。
然后Ubuntu就可以继续安装了,安装完之后选择重启,拔出U盘。
在启动界面按快捷键再次进入BIOS
(8)BIOS设置
过程和开始设置U盘优先启动类似,设置Ubuntu为第一启动项(排在Windows Boot Manager前面),保存后退出。
接下来就可以看见启动菜单,通过键盘选择“Ubuntu”选项,然后回车,等待进入Ubuntu桌面,在开始的设置窗口“Livepatch”,电机前进,前进,前进,完成
(9)系统时间同步(这一步不改也没事)
如果不进行这一步,Windows或Ubuntu的时间可能会错乱(相差八个小时左右)。
解决方法:终端下安装时间管理工具并设置时间同步
sudo apt install ntpade
sudo ntpade time.windows.com
sudo hwclock --localtime --systohc重启电脑进入windows(windows boot manager),此时时间应该已经同步了。
Ubuntu系统到此安装结束
图片引用出处:
(82条消息) Ubuntu20.04安装详细图文教程(双系统)_Hacah的博客-CSDN博客_ubuntu20.04安装教程
【ubuntu20.04】10分钟win10安装ubuntu20.04双系统(无需Bios设置)_哔哩哔哩_bilibili
ROS安装
Ubuntu20.04对应的ROS版本是noetic 这里的教程主要参考的是ros官网教程,网站为:noetic/Installation/Ubuntu - ROS Wiki
(1)配置系统软件源
打开“软件和更新”,点击“Ubuntu软件”界面,勾选universe,restricted,multiverse三项
(2)设置source.list
打开终端,输入指令来安装软件
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'这里建议直接用清华镜像源安装(快一些)
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'(3)设置密钥
如果上一步用清华源安装的话,输入下面的密钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654若无法连接服务器,可以尝试将上面指令指令中的hkp://keyserver.ubuntu.com:80 为 hkp://pgp.mit.edu:80 。
也可以使用curl命令替换apt-key命令,这在使用代理服务器的情况下比较有用:
curl -sSL 'http://keyserver.ubuntu.com/pks/lookup?op=get&search=0xC1CF6E31E6BADE8868B172B4F42ED6FBAB17C654' | sudo apt-key add -如果上一步是从官网安装的话,输入下面的指令
sudo apt install curl
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -(4)开始安装
sudo apt update
安装完整版ROS命令:
sudo apt install ros-noetic-desktop-full
若以后想安装某个ROS的软件包:
sudo apt install ros-noetic-PACKAGE
PACKAGE为需要的安装包名,如:
sudo apt install ros-noetic-slam-gmapping(5)设置环境
你需要在使用ROS的每个bash终端中source这个脚本。
source /opt/ros/noetic/setup.bash
而下面这些命令可以在每次启动新的shell窗口时很方便地为你自动source一下这个脚本:
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
(6)初始化rosdep
这里是最可能遇到问题的地方
在使用许多ROS工具之前,你需要初始化rosdep。rosdep使你能够轻松地为你要编译的源码安装系统依赖,并且是运行ROS中一些核心组件所需要的。如果你还没有安装rosdep,请按如下步骤进行。
sudo apt install python3-rosdep
sudo rosdep init
rosdep update关于rosdep可能遇到的问题,推荐两篇写的挺好的博客(我当时这一步遇到问题就是照着上面的解决方法一个一个试的,亲测好使)
详细介绍如何在ubuntu20.04中安装ROS系统,超快完成安装(最新版教程)_慕羽★的博客-CSDN博客_ubuntu20.04安装ros
详细介绍如何在ubuntu20.04中安装ROS系统,以及安装过程中出现的常见错误的解决方法,填坑!!!_慕羽★的博客-CSDN博客_ubuntu20.04安装ros
这两篇博客只看关于rosdep的部分就可以了。
(7)运行“小海龟”来检验是否完成安装
打开终端,输入roscore
打开另一个终端(快捷键ctrl+alt+t),输入rosrun turtlesim turtlesim_node 这时可以看到小海龟仿真界面已经打开了。
再打开一个新终端,输入rosrun turtlesim turtle_teleop_key,就可以通过键盘的上下左右键控制小海龟的运动了。

ROS安装到此结束















 376
376











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









