






前言
摘要:本文介绍海克斯康带扫描功能的三坐标测量机,运用PC-DMIS CAD 2018 R1测量软件针对多边形轮廓孔或轴的扫描测量方法,通过构造圆计算得出多边形轮廓P3G孔、轴尺寸值,并应用报告命令模块创建视图分析轮廓形状。
关键词:曲线扫描,最大内切,最小外接
一、引言
多边形轮廓P3G能够最大限度地传递转矩,并且不需要破坏连接部分的表面,能够避免应力集中,同时保持良好对中。我公司蒸汽压缩机高速转子组叶轮和齿轮轴就采用三边形轮廓连接。其轮廓型面的尺寸及形位公差要求较高,采用一般的测量工具千分尺无法准确检测该轮廓型面,自去年购买三坐标测量机后可以满足三边形轮廓轴孔尺寸及形位公差检测,能够准确的控制高速转子组叶轮与主轴的配合质量要求。
二、多边形轮廓孔测量(多边形轮廓轴大同小异)
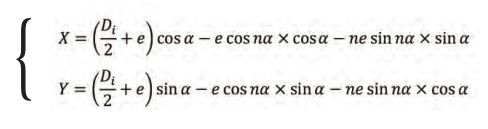
1、由德国标准DIN32711可知,多边形轮廓P3G上的坐标点(x,y)的计算公式如下:
![]()
公式中,Di为内切圆直径,Da为外接圆直径,α为坐标点(x,y)的极角,n为多边形数量,如下图1所示。在三边形轮廓P3G中,n=3,e为轮廓偏移量,是标准值。Dm为当量圆直径。
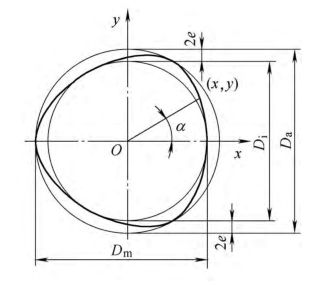
图 1
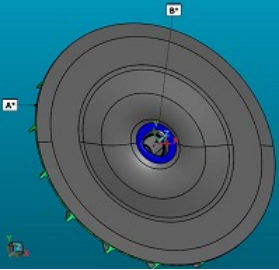
图 2
2、如上图2所示,在CAD模型上绿色部分外圆或圆柱为基准A,蓝色装配端面为基准B,在CAD提取A和B基准测量特征及三边形轮廓其中一个顶部的矢量点确定旋转方向建立3-2-1坐标系。
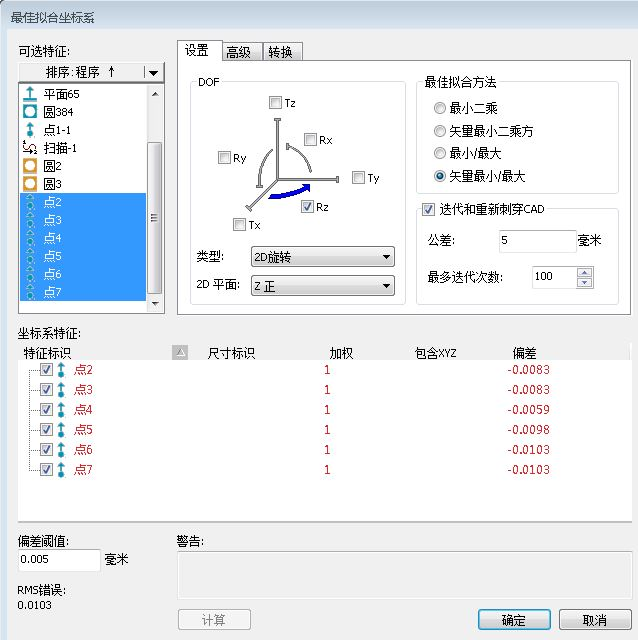
3、 在模型上的三边形轮廓P3G的三个弧形曲面提取6个矢量点运用最佳拟合建立坐标系,这一步是将三边形轮廓的Z轴旋转方向确定,其他5个自由度不变。
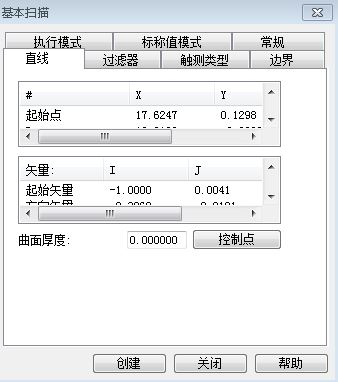
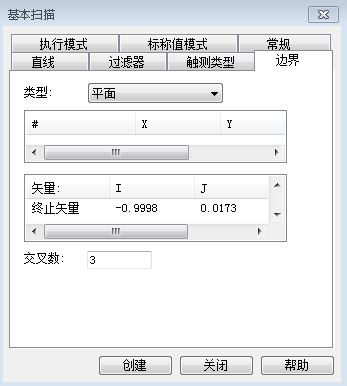
4、坐标系建好后运行一下程序,再用扫描模块中的曲线扫描项编辑起始点方向点终止点,注意CAD上查找标准值后要调整测量深度值,矢量方向,边界中的交叉数设置,设置扫描参数后测量一下三边形轮廓路径线。
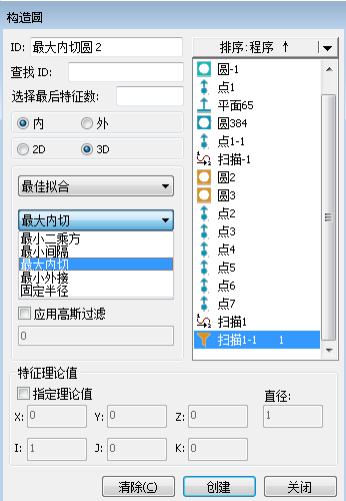
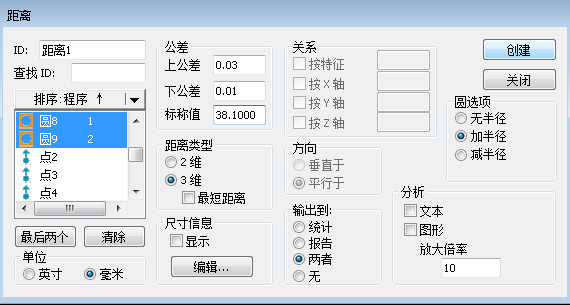
5、将扫描的曲线特征通过最佳拟合构造出最大内切圆与最小外接圆,评价两个圆直径Di=最大内切圆Da=最小外接圆,再用距离评价计算两圆距离加半径后得出Dm值。
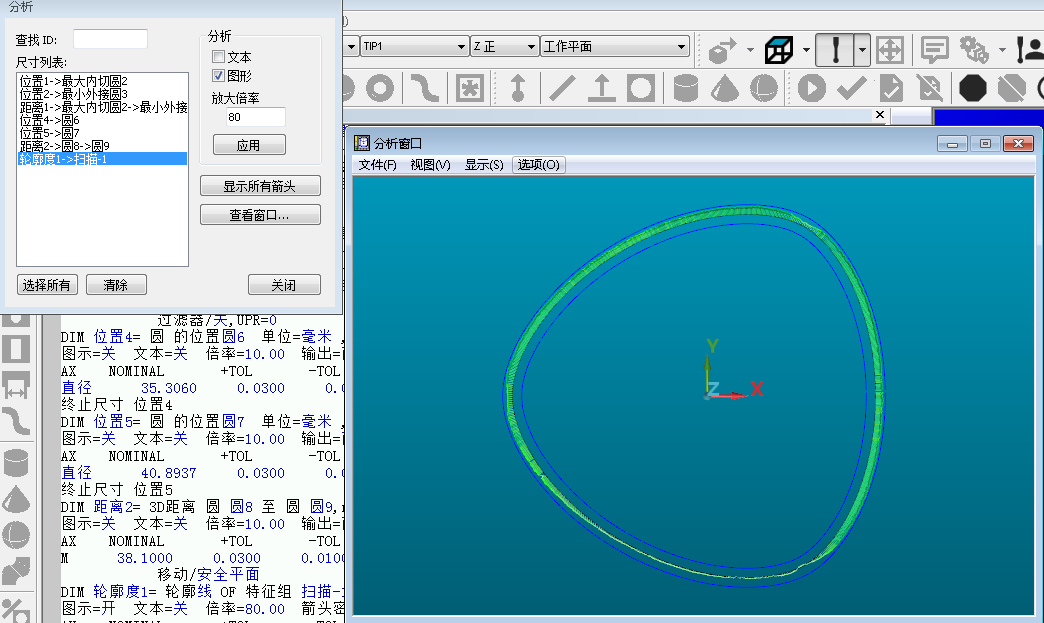
6、使用线轮廓评价扫描特征,并在插入→报告命令→分析→将图形放大数倍应用后显示所有箭头,查看窗口分析视图后可在分析窗口选项中创建/保存分析视图命令,刷新报告后报告中就有三边形轮廓图形,设计工艺加工人员可以分析三边形轮廓图形不断改进磨床加工方法。
三、测量程序
模式/自动
安全平面/Z正,80,Z正,80,开
移动/安全平面
平面65 =特征/触测/平面/默认,直角坐标,无,最小二乘方
理论值/<0,0,0>,<0,0,1>
实际值/<0.0004,0.0004,0.1133>,<-0.0000136,0.0000459,1>
目标值/<0,0,0>,<0,0,1>
角矢量=<1,0,0>,环形
显示特征参数=否
显示相关参数=否
A3 =坐标系/开始,回调:A1,列表=是
建坐标系/找平,Z正,平面65
坐标系/终止
移动/安全平面
圆384 =特征/触测/圆/默认,直角坐标,外,最小二乘方
理论值/<0,0,-4.8>,<0,0,1>,384,0
实际值/<0.0043,-0.0004,-4.8>,<0,0,1>,384.1274,0
目标值/<0,0,-4.8>,<0,0,1>
起始角=0,终止角=360
角矢量=<1,0,0>
方向=逆时针
显示特征参数=否
显示相关参数=否
移动/安全平面
点1-1 =特征/触测/矢量点/默认,直角坐标
理论值/<-20.4445,0.233,-5.5726>,<0.999715,-0.0238724,0>
实际值/<-20.4115,0.2351,-5.5729>,<0.999715,-0.0238724,0>
目标值/<-20.4445,0.233,-5.5726>,<0.999715,-0.0238724,0>
捕捉=否
显示特征参数=否
显示相关参数=否
A4 =坐标系/开始,回调:A3,列表=是
建坐标系/旋转圆,X负,至,圆384,AND,点1-1,关于,Z正
建坐标系/平移,X轴,圆384
建坐标系/平移,Y轴,圆384
建坐标系/平移,Z 轴,平面65
坐标系/终止
移动/安全平面
点2 =特征/触测/矢量点/默认,直角坐标
理论值/<15.1694,11.6121,-9.6648>,<-0.9045357,-0.4263979,0>
实际值/<15.6797,10.9271,-9.7778>,<-0.9227015,-0.3855153,-0.0000046>
目标值/<15.1694,11.6121,-9.6648>,<-0.9395315,-0.3424626,0>
捕捉=否
显示特征参数=否
显示相关参数=否
点3 =特征/触测/矢量点/默认,直角坐标
理论值/<17.5852,-2.1262,-19.4005>,<-0.9977578,0.0669279,0>
实际值/<17.4755,-2.9102,-19.5141>,<-0.993766,0.1114862,0.0000191>
目标值/<17.5852,-2.1262,-19.4005>,<-0.9806709,0.1956643,0>
捕捉=否
显示特征参数=否
显示相关参数=否
点4 =特征/触测/矢量点/默认,直角坐标
理论值/<1.2118,-18.8026,-19.5735>,<0.1379039,0.9904456,0>
实际值/<0.3634,-18.8455,-19.6876>,<0.1820642,0.9832867,0.0000424>
目标值/<1.2118,-18.8026,-19.5735>,<0.2481874,0.968712,0>
捕捉=否
显示特征参数=否
显示相关参数=否
点5 =特征/触测/矢量点/默认,直角坐标
理论值/<-14.26,-11.2951,-19.741>,<0.6822693,0.731101,0>
实际值/<-14.7609,-10.6501,-19.8545>,<0.7142855,0.6998544,0.000022>
目标值/<-14.26,-11.2951,-19.741>,<0.7421944,0.6701846,0>
捕捉=否
显示特征参数=否
显示相关参数=否
点6 =特征/触测/矢量点/默认,直角坐标
理论值/<-17.713,7.2267,-21.5724>,<0.8248157,-0.5654017,0>
实际值/<-17.3874,8.0211,-21.685>,<0.7987024,-0.6017263,-0.0000388>
目标值/<-17.713,7.2267,-21.5724>,<0.7858728,-0.6183882,0>
捕捉=否
显示特征参数=否
显示相关参数=否
点7 =特征/触测/矢量点/默认,直角坐标
理论值/<-2.5492,18.0282,-20.6598>,<0.2882956,-0.9575415,0>
实际值/<-1.7468,18.1332,-20.7722>,<0.2451804,-0.9694775,-0.0000478>
目标值/<-2.5492,18.0282,-20.6598>,<0.2078398,-0.9781629,0>
捕捉=否
显示特征参数=否
显示相关参数=否
A2 =坐标系/开始,回调:A1,列表=是
建坐标系/最佳拟合2D,Z正,最小二乘方,创建权重=否,仅旋转,使用缩放比例=否,0,0,0,717.4288
ITERATEANDREPIERCECAD=是,TOLERANCE=5,MAX ITERATIONS=100
偏差阈值=0.005
显示所有输入=否,显示所有参数=否
坐标系/终止
移动/安全平面
扫描1 =基本扫描/直线,触测点数=945,显示触测=否,显示所有参数=是
<17.636,0.6082,-9.9985>,<-20.4634,0.5386,-10.0018>,剖面矢量=-0.0000856,-0.0002015,1,方向矢量=-0.3878731,-0.9217128,-0.0002189
起始矢量=-0.9999892,-0.0046573,-0.0000865,终止矢量=-0.9999662,0.0082261,-0.0000839,厚度=0,测头补偿=是,自动移动=否,距离=0
过滤器/NULL 过滤器,
执行模式=重新学习
边界平面,<-20.4635,0.5385,-9.7721>,平面矢量=0.0085703,0.979349,0.2019951,Crossings=3
触测类型/矢量
标称模式=查找标称值,10
终止扫描
移动/安全平面
扫描1-1 =特征/特征组,直角坐标
理论值/<0.0064,0.0162,-9.9987>,<-0.0000856,-0.0002015,1>
实际值/<0.0072,0.0175,-9.9987>,<-0.0000856,-0.0002015,1>
构造/特征组,过滤器,样条线,扫描1,
过滤器/开,滤波=6,
最大内切圆2 =特征/圆,直角坐标,内,最大内切,否
理论值/<0,0,-9.9987>,<-0.0001147,-0.0002473,1>,35.306
实际值/<0.0014,0.0016,-9.9987>,<-0.0000921,-0.000194,1>,35.3187
构造/圆,最佳拟合,3D,扫描1-1,,
局外层_移除/关,3
过滤器/关,UPR=0
最小外接圆3 =特征/圆,直角坐标,内,最小外接,否
理论值/<-0.0001,-0.0001,-9.9987>,<-0.0001147,-0.0002473,1>,40.8938
实际值/<-0.003,0.0004,-9.9987>,<-0.0000921,-0.000194,1>,40.9
构造/圆,最佳拟合,3D,扫描1-1,,
局外层_移除/开,3
过滤器/关,UPR=0
DIM 位置1= 圆 的位置 最大内切圆2 单位=毫米 ,$
图示=关 文本=关 倍率=10.00 输出=两者 半角=否
AX NOMINAL +TOL -TOL MEAS DEV OUTTOL
直径 35.3060 0.0300 0.0100 35.3187 0.0126 0.0000 -#-------
终止尺寸 位置1
DIM 位置2= 圆 的位置 最小外接圆3 单位=毫米 ,$
图示=关 文本=关 倍率=10.00 输出=两者 半角=否
AX NOMINAL +TOL -TOL MEAS DEV OUTTOL
直径 40.8940 0.0300 0.0100 40.9000 0.0060 0.0040 <--------
终止尺寸 位置2
DIM 距离1= 3D距离 圆 最大内切圆2 至 圆 最小外接圆3,最短=关,加半径 单位=毫米,$
图示=关 文本=关 倍率=10.00 输出=两者
AX NOMINAL +TOL -TOL MEAS DEV OUTTOL
M 38.1000 0.0300 0.0100 38.1137 0.0137 0.0000 -#-------
DIM 轮廓度1= 轮廓线 OF 特征组 扫描1-1 仅形状 矢量最小/最大 关于 Z正 单位=毫米 ,$
图示=关 文本=关 倍率=210.00 箭头密度=100 输出=两者
AX NOMINAL +TOL -TOL MEAS DEV OUTTOL
M 0.0000 0.0200 0.0000 0.0112 0.0112 0.0000 #---|----
分析视图/轮廓度1,,
四、结语
通过采用基于扫描式三坐标测量机检测方法,比之前使用传统量具的检测方式数据更加真实可靠。结合使用PC-DMIS CAD测量软件,使多边形轮廓类零件测量尺寸和线轮廓更加快速准确,为以后的产品加工和工艺状态分析提供了可借鉴的测量数据,隐形经济效益显著。
参考文献:
1.吴文魁、翟晓红、祁荣先 《多边形轮廓P3G的计算及加工》2017年第10期。

















 7033
7033

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









