







Part.1 项目背景
在现代物流和制造行业中,麻袋的拆垛操作是一个重要且频繁的任务。传统的麻袋拆垛工作通常由人工完成,分拣效率较低,人力成本较高,现场麻袋堆叠、变形严重,垛型不规则、不固定,严重影响分拣效率。
基于三维机器视觉的机器人麻袋拆垛解决方案通过机器人搭配三维机器视觉系统,可以有效解决以上项目痛点,把控麻袋拆垛的效率。
Part.2 解决方案
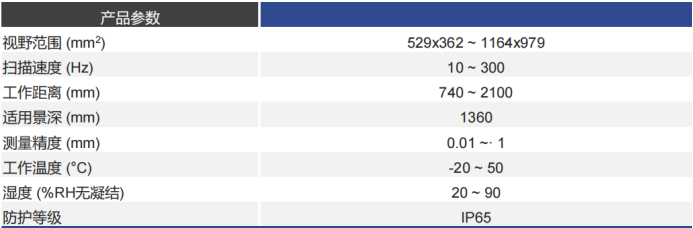
该解决方案包括三维视觉系统、机械臂和夹具、智能控制系统。三维视觉系统选用的是显扬科技HY-M5三维视觉系统,该系统成像快、精度高,HY-M5扫描速度为10-300Hz,扫描精度能精确至±0.01mm,配合自研智能算法,可以快速扫描和获取纸箱的尺寸、形状、堆码高度等信息,实现对纸箱的精准识别和定位。

机械臂和夹具:配备高性能的机器人臂和灵活的夹爪,通过HY-M5三维视觉传感器提供的数据,能够准确抓取叠放麻袋,实现自动化的拆码操作。
智能控制系统:集成先进的控制系统,适配市场上主流的机械臂和夹具,通过实时处理三维视觉传感器的数据,规划机器人的最佳路径和动作,确保操作的高效稳定。
Part.3 方案优势
1.灵活适应:支持现场数种尺寸的麻袋,轻松处理麻袋褶皱、变形、堆叠等复杂情况。
2.效率高:单次拍照获取整层麻袋3D信息,拆垛速度快,效率高。
3.提高准确性:三维机器视觉技术可以精准识别纸箱的位置和尺寸,减少了堆码错误和叠放不规范的问题,提高了操作准确性。
4.有效清理残料:智能规划机器人下游抖料动作,配合破袋机等设备使用,可有效清理残料。















 478
478











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









