







 本文探讨了电商行业快速发展的背景下,物流行业面临的挑战,特别是铝合金物料分拣难题。通过介绍一款基于三维视觉、传感器和机器人的自动化无序分拣系统,文章强调其在提高分拣速度、减少错误和降低人力成本方面的优势。
本文探讨了电商行业快速发展的背景下,物流行业面临的挑战,特别是铝合金物料分拣难题。通过介绍一款基于三维视觉、传感器和机器人的自动化无序分拣系统,文章强调其在提高分拣速度、减少错误和降低人力成本方面的优势。

近年来,电商行业蓬勃发展,订单的海量化、订单类型的碎片化,使物流行业朝着“多品种、无边界、分类广”的方向迅速发展。根据许多研究机构的预测,电子商务销售额预计将以每年两位数的速度增长,推动整个行业的规模不断扩大。
物流分拣一直是一项单调乏味的体力活,长期以来存在着招工难的问题。再加上人口老龄化的加剧,未来物流行业将面临用工短缺和人力成本上升等挑战,这些问题会愈演愈烈。
无论是人工分拣还是传统的自动化设备,都无法满足日益庞大且繁杂的物流订单。因此,智能化转型升级已经成为必然趋势。
Part.1 项目背景
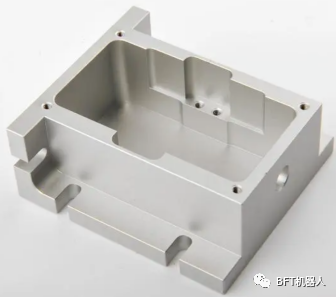
一家重要的物流企业急需进行自动化分拣改造,特别是在铝合金物料分拣线方面。这条分拣线所处理的铝合金物料来自20多种不同规格,呈混乱状态铺放,而且体积较小,每个物料的重量都不超过1kg。
这样的复杂环境通过高效的自动化分拣系统,能够应对不同规格、混乱布局和小尺寸、轻量级的物料,帮助企业实现降本增效的目的。
 <
<
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1936
1936

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









