






 论文介绍了一种新的车道检测方法,通过结合全局特征和结构损失,实现快速且准确的车道检测,尤其在遮挡和极端光照条件下表现出色。轻量级版本可达300+FPS,对自动驾驶等领域有重要价值。
论文介绍了一种新的车道检测方法,通过结合全局特征和结构损失,实现快速且准确的车道检测,尤其在遮挡和极端光照条件下表现出色。轻量级版本可达300+FPS,对自动驾驶等领域有重要价值。
该论文标题为《Ultra Fast Structure-aware Deep Lane Detection》,作者是浙江大学计算机科学与技术学院的Zequn Qin、Huanyu Wang和Xi Li。论文提出了一种新颖的、简单而有效的车道检测方法,旨在解决具有挑战性场景下的车道检测问题,并实现极快的检测速度。
Github源码:https://github.com/cfzd/Ultra-Fast-Lane-Detection
摘要(Abstract)
- 现代车道检测方法主要将车道检测视为像素级分割问题,但在处理具有挑战性场景和速度要求时存在困难。
- 作者受人类感知启发,提出在严重遮挡和极端光照条件下,识别车道主要依赖于上下文和全局信息。
- 基于此观察,作者提出了一种新的车道检测公式,特别针对极快的速度和挑战性场景。
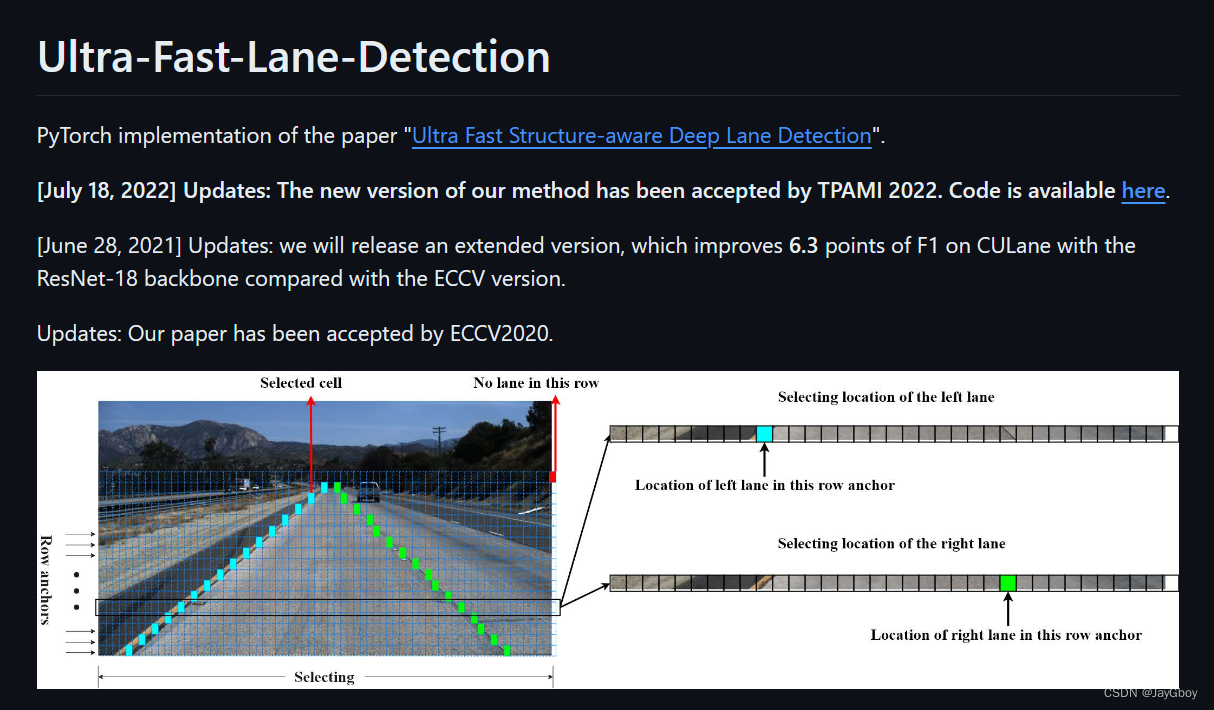
- 该方法将车道检测视为基于全局特征的逐行选择问题,显著降低了计算成本。
- 通过使用全局特征的大感受野,该方法也能够处理挑战性场景。
- 此外,作者还提出了一种结构损失函数,以显式地建模车道的结构。
- 在两个车道检测基准数据集上的广泛实验表明,该方法在速度和准确性方面都达到了最先进的性能。
- 一个轻量级版本甚至能够以300+帧每秒的速度运行,比之前最先进的方法快至少4倍。
引言(Introduction)
- 车道检测是计算机视觉中的一个基本问题,具有广泛的应用,如ADAS(高级驾驶辅助系统)和自动驾驶。
- 传统图像处理方法和深度分割方法是目前主流的两种车道检测方法。
- 深度分割方法因其强大的表示和学习能力而在该领域取得了巨大成功。
- 然而,作为自动驾驶的基本组成部分,车道检测算法需要极低的计算成本。
- 此外,还存在所谓的“无视觉线索”问题,即在严重遮挡和极端光照条件下,几乎没有可用于车道检测的视觉线索。
相关工作(Related Work)
- 传统方法通常基于视觉信息解决车道检测问题,利用图像处理技术如HSI色彩模型和边缘提取算法。
- 随着机器学习的发展,一些采用模板匹配和支持向量机等算法的方法被提出。
- 深度学习方法,如基于深度神经网络的方法,在车道检测中显示出优越性。
方法(Method)
- 作者详细描述了他们的方法,包括新的车道检测公式和车道结构损失。
- 作者还提出了一种特征聚合方法,用于高级语义和低级视觉信息。
实验(Experiments)
- 作者在两个广泛使用的基准数据集TuSimple和CULane上验证了他们的方法。
- 实验结果表明,该方法在准确性和速度方面都取得了最先进的性能。
相似性损失(Similarity Loss)
该论文中提出的结构损失函数旨在显式地利用车道的先验信息,以优化车道检测模型的性能。结构损失函数包含两个主要部分:相似性损失(similarity loss)和形状损失(shape loss),它们共同工作以确保模型能够学习到车道的连续性和形状特征。
相似性损失是基于这样一个事实:车道是连续的,即相邻行锚点(row anchors)上的车道点应该彼此接近。在论文中,车道的位置由分类向量表示,因此连续性通过约束相邻行锚点上的分类向量分布来实现。
相似性损失的定义如下:

总体结构损失(Overall Structural Loss)
将相似性损失和形状损失结合起来,得到总体结构损失:
![]()
其中,λ 是损失系数,用于平衡两个损失项的贡献。
通过这种结构损失,模型不仅学习到了车道的局部特征,还学习到了车道在图像中的全局结构信息,包括车道的连续性和形状。这使得模型能够在没有足够视觉线索的情况下(例如车道被遮挡或光照条件极端时)也能准确地检测到车道。结构损失的引入显著提高了车道检测的性能,特别是在处理具有挑战性场景时。
创新点(Innovation point)
这篇论文的创新点主要体现在以下几个方面:
-
新型车道检测公式:论文提出了一种新的车道检测方法,将车道检测视为基于全局特征的逐行选择问题,而非传统的像素级分割。这种方法显著降低了计算成本,同时提高了处理速度,特别是在具有挑战性的场景下。
-
结构损失函数:为了显式地利用车道的先验结构信息,论文提出了结构损失函数,包括相似性损失和形状损失。这是首次在深度车道检测方法中优化这类信息,有助于模型更好地学习车道的连续性和形状特征。
-
极快的检测速度:论文中提出的方法能够实现极快的车道检测速度,轻量级版本甚至能够达到300+帧每秒(FPS),比之前最先进的方法快至少4倍。这对于需要实时处理的应用场景(如自动驾驶)具有重要意义。
-
高准确性:在两个车道检测基准数据集上的实验结果表明,该方法在准确性方面达到了最先进的水平,证明了新公式和结构损失函数在提高检测性能方面的有效性。
-
全局特征的大感受野:通过使用全局特征的大感受野,该方法能够捕捉到更广泛的上下文信息,从而更好地处理遮挡和光照变化等挑战性场景。
-
代码开源:作者提供了实现该方法的代码,使得其他研究人员和开发者可以复现结果,验证方法的有效性,并在此基础上进行进一步的研究和开发。
这些创新点共同构成了论文的核心贡献,不仅推动了车道检测技术的发展,也为自动驾驶等领域的实际应用提供了强有力的技术支持。
结论(Conclusion)
- 论文提出了一种新的车道检测公式和结构损失,实现了显著的速度和准确性。
- 该方法将车道检测视为基于全局特征的逐行选择问题,有效解决了速度和无视觉线索问题。
- 结构损失用于显式建模车道的先验信息。
- 使用Resnet-34作为骨干网络的模型在准确性和速度方面达到了最先进的水平,而使用Resnet-18的轻量级版本甚至能够达到322.5 FPS的速度。
改进点(Area for improvement)
虽然论文中没有直接提到后续工作的具体方向或可能的改进点,但是通常在研究的结尾部分,作者会讨论他们工作的局限性,并提出未来可能的研究方向。在这篇论文中,以下几个方面可能是作者认为有待进一步探索的:
-
泛化能力:尽管论文中提出的方法在特定的基准数据集上取得了良好的结果,但是如何将这种方法泛化到更多样化的道路类型、交通环境和不同国家的道路标准上,是一个值得研究的问题。
-
实时性能优化:虽然论文中提出的方法已经实现了较高的检测速度,但在实际的车辆应用中,如何进一步优化模型以满足实时性要求,同时保持高准确性,是一个重要的研究方向。
-
模型压缩和加速:对于移动和嵌入式设备上的车道检测应用,模型的大小和计算资源消耗是需要考虑的关键因素。因此,研究如何对模型进行压缩和加速,以便在资源受限的设备上部署,是一个潜在的改进点。
-
多任务学习:车道检测通常是自动驾驶系统中的一个组成部分,与其他任务(如车辆检测、行人识别等)一起工作。探索如何将车道检测与其他任务结合起来,通过多任务学习提高整体系统的性能和效率,可能是一个有趣的研究方向。
-
鲁棒性增强:尽管结构损失函数提高了模型对挑战性场景的鲁棒性,但在极端天气条件、低光照环境或非常规道路标记等情况下,模型的性能可能会受到影响。因此,研究如何进一步提高模型在这些情况下的鲁棒性是一个重要的问题。
-
数据集和评估指标:当前的车道检测数据集可能无法完全覆盖所有可能的驾驶场景。开发新的数据集,包含更多样化的场景,并设计更全面的评估指标来衡量模型的性能,将有助于推动这一领域的发展。
-
解释性和可视化:提高模型的可解释性,帮助研究人员和最终用户理解模型的决策过程,以及开发直观的可视化工具来展示模型如何检测车道,可以增加对模型的信任,并在实际应用中更容易被接受。
这些潜在的改进点和研究方向可以为未来的研究工作提供指导,并有助于进一步提升车道检测技术的性能和实用性。


















 3698
3698

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











