






一.进行前期准备
这里不再赘述,ros的安装,然后cartographer的安装,然后进行demo试跑,跑通后即可。
若在安装cartographer有问题,可私聊我进行远程安装辅助(需要收些米)
二.进行雷达与电脑和虚拟机的连接
由于使用的是windows+虚拟机,故不光虚拟机需要更改适配的ip地址,我们也需要配置电脑ip地址与我们的雷达进行匹配
1.修改本机ip地址
进入控制面板→网络和Internet→网络和共享中心→更改适配器设置→找到以太网(显示有连接不识别的那个)右键属性→找到Internet协议版本4(TCP/IPv4)双击进入→根据雷达说明书来进行IP地址的对应改变,我的改变如下图
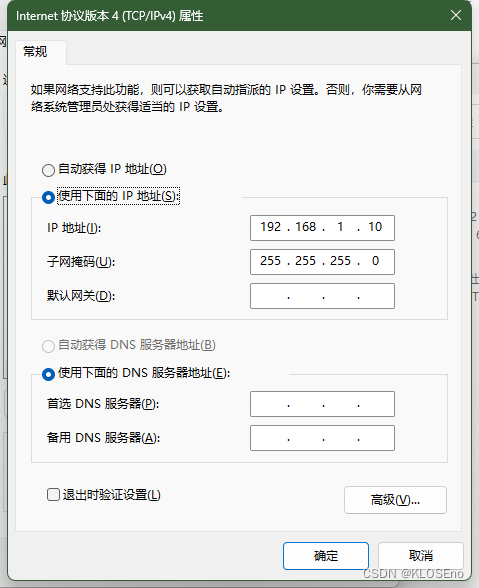
然后使用win+r输入cmd打开命令行窗口,输入ping 192.168.1.100,如果有反馈都能接收到包那么认为设备正常。
2.修改虚拟机设置
这里以VMware为例
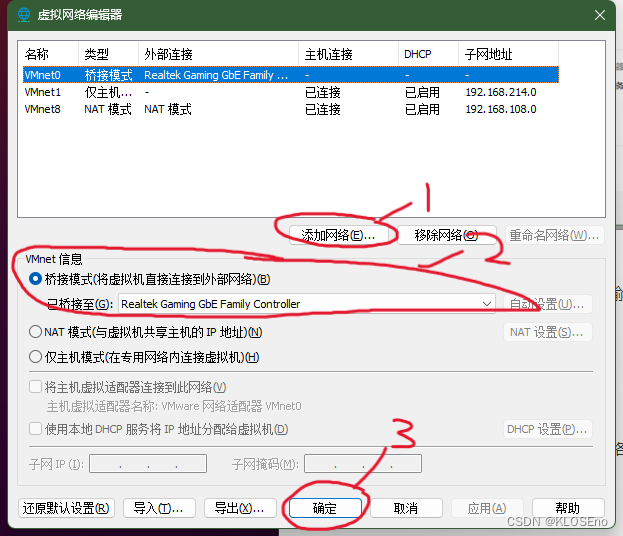
首先点击VMware的编辑,然后点击虚拟网络编辑器,打开后点击右下角的更改设置,只有这样我们才能添加桥接网络,具体修改如下图,首先添加网络VMnet0然后选择桥接模式,找到第一步你修改的以太网名称,然后选上即可。
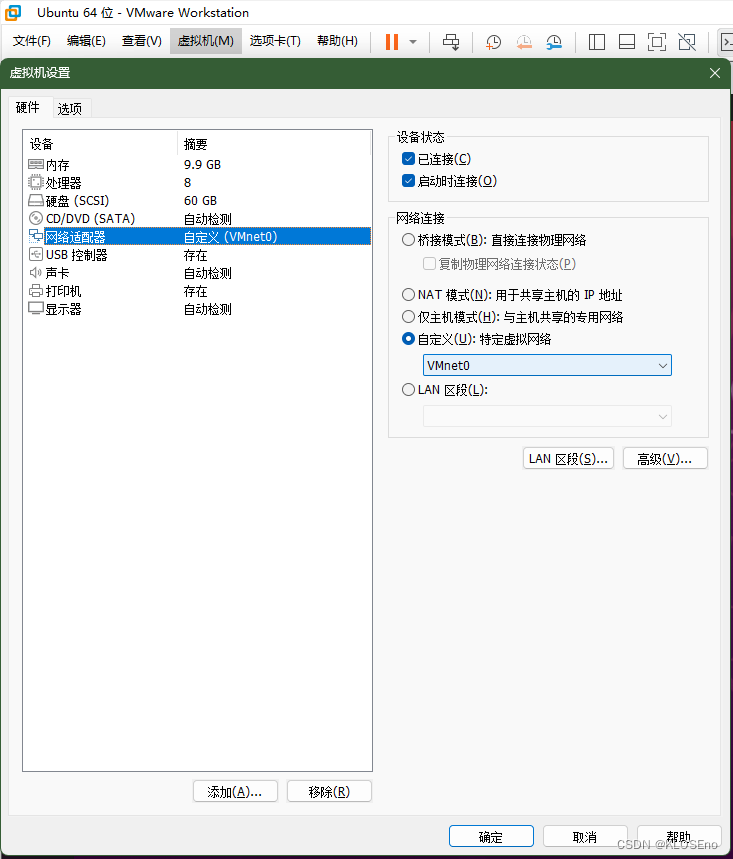
然后回到虚拟机界面,找到上面的虚拟机,按照下图所改即可
最后进入虚拟机界面,点击右上角三角号(电源图标边上),点击有线,有线设置
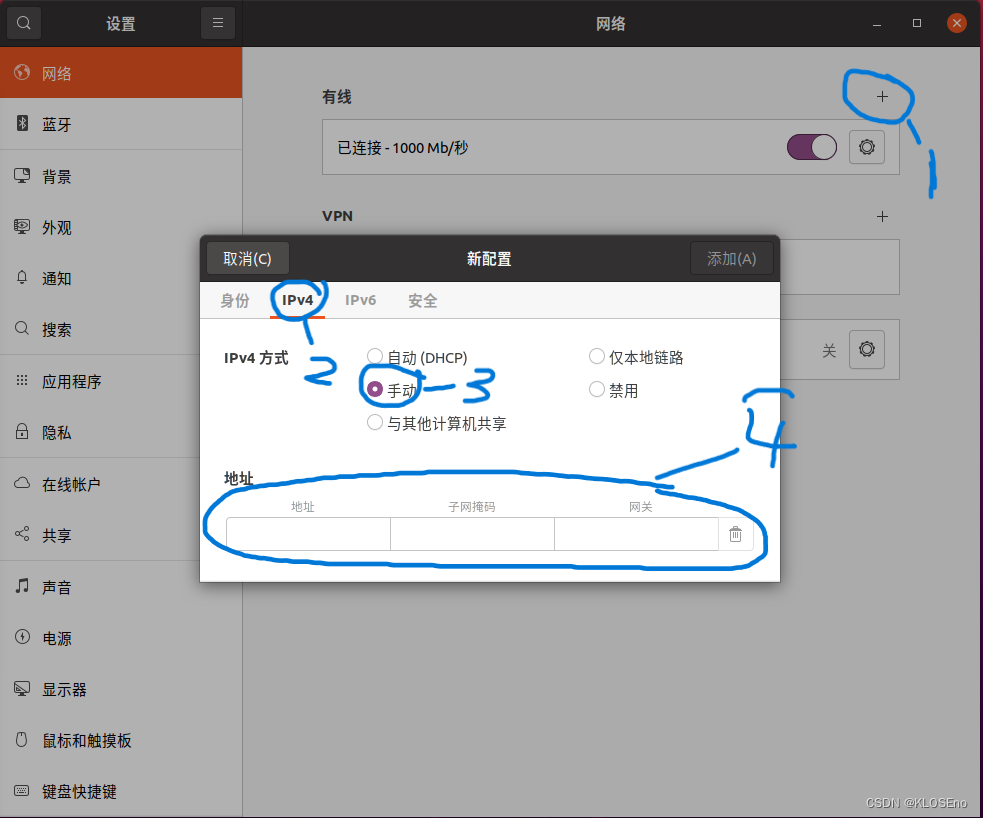
然后按照图中顺序配置即可,其中地址和子网掩码和在windows中填的一样,这里看一下自己设备对应的码即可,同样也可在终端输入ping来看是否有回应。
三.进行欧镭雷达的ros驱动配置
这里以欧镭雷达的LR-1BS5H为例来进行配置,各种雷达传感器应该都是大同小异,首先去其官网下载其ROS驱动,然后在安装了ROS环境的系统中创建工作区
mkdir -p ole2d_ws
将ros驱动中的文件解压到上述文件夹中,然后打开终端安装depend
rosdep install --from-paths src --ignore-src --rosdistro=${ROS_DISTRO} -y
最后进行编译
chmod -R 777 src catkin_make
这样我们的雷达组件就算是弄好嘞
然后我们开始测试一下其是否可以运行,这里我们打开三个终端
第一个终端运行roscore
roscore
第二个终端我们运行激光雷达
source devel/setup.bash roslaunch olelidar scan.launch
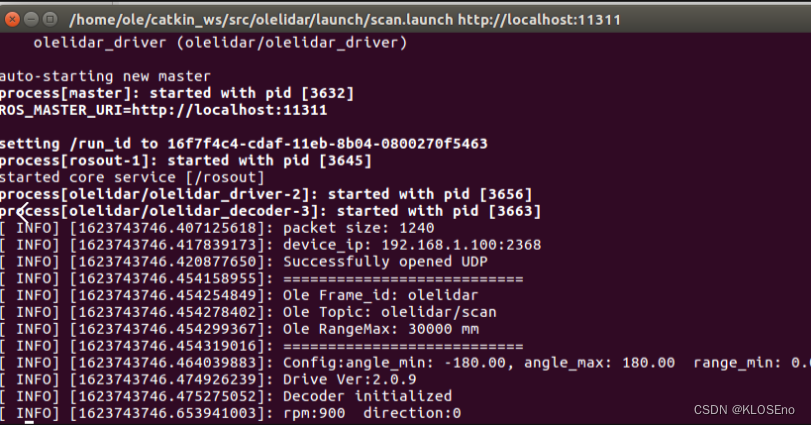
运行结果若如上图所示并且没有warning报错,即可(博主在一开始应用时出现了warning报错,最后重启重连接了一下激光雷达就好了,这里给可能会出现同种错误的友友一个提醒)
然后我们在第三个终端调出rviz可视化工具
rviz rviz -f olelidar
然后我们在rviz中add添加一个topic话题olelidar/scan/LaserScan即可得到数据。在本节我们学会了如何连接自己的激光雷达,那么下节我们开始使用连接好的激光雷达来进行建图。















 8378
8378

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









