







1. 机船协同系统坐标系建立
为实现无人机无人艇的协同,需先建立无人机无人艇协同系统坐 标系,包括地球坐标系和载体坐标系。、
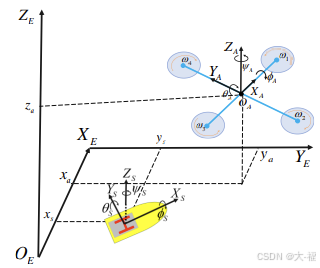
从载体坐标系转换到世界坐标系的旋转矩阵为

2.无人机数学模型
四旋翼无人机主要受到力为自身重力、空气阻力和四个旋翼叶片提供的推力。 由牛顿第二定律可以得到四旋翼无人机的受力分析为:
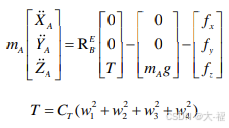
mA 为无人机的质量, g 表示重力加速度, T 为 ZA 轴方向上受 到的推力, fx fy fz 分别对应 XA 轴, YA 轴, ZA 轴所受到的空气阻力。 将等式两边同时除以无人机质量 mA,可得无人机位置动力学模型为:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 4312
4312

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









