







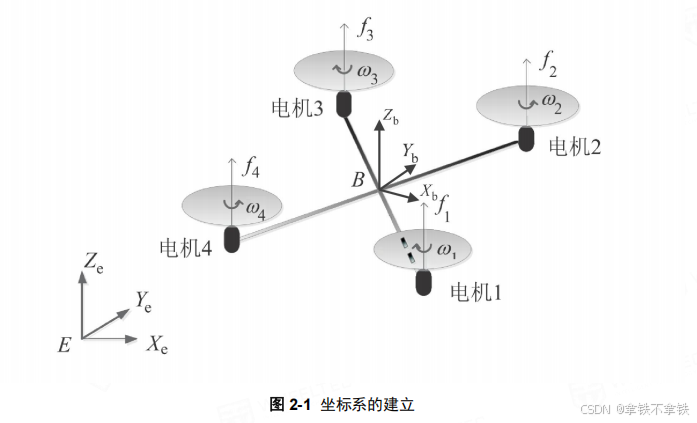
为了得到系统的状态空间表达式。首先需要对该系统进行动力学。

建立如图,建立如图的直角坐标系。

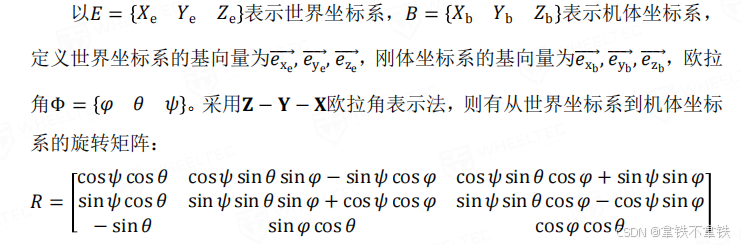
Z - Y - X欧拉角表示法也叫Z - Y - X顺序
先绕Z轴旋转,然后绕Y轴旋转,最后绕X轴旋转。这种顺序也被称为
为了得到系统的状态空间表达式。首先需要对该系统进行动力学。
建立如图,建立如图的直角坐标系。
Z - Y - X欧拉角表示法也叫Z - Y - X顺序
先绕Z轴旋转,然后绕Y轴旋转,最后绕X轴旋转。这种顺序也被称为
 1813
325
337
428
1813
325
337
428

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























