







 本文介绍了如何在ROS中使用Gmapping进行SLAM建图,包括设置map_update_interval和linearUpdate参数,以及如何查看和调整tf关系。通过一个模拟RoboCup场景的launch文件,展示了如何运行Gmapping、rviz和键盘控制节点。还提到了在低算力设备上的性能优化策略。
本文介绍了如何在ROS中使用Gmapping进行SLAM建图,包括设置map_update_interval和linearUpdate参数,以及如何查看和调整tf关系。通过一个模拟RoboCup场景的launch文件,展示了如何运行Gmapping、rviz和键盘控制节点。还提到了在低算力设备上的性能优化策略。
Gmapping
gmapping接口
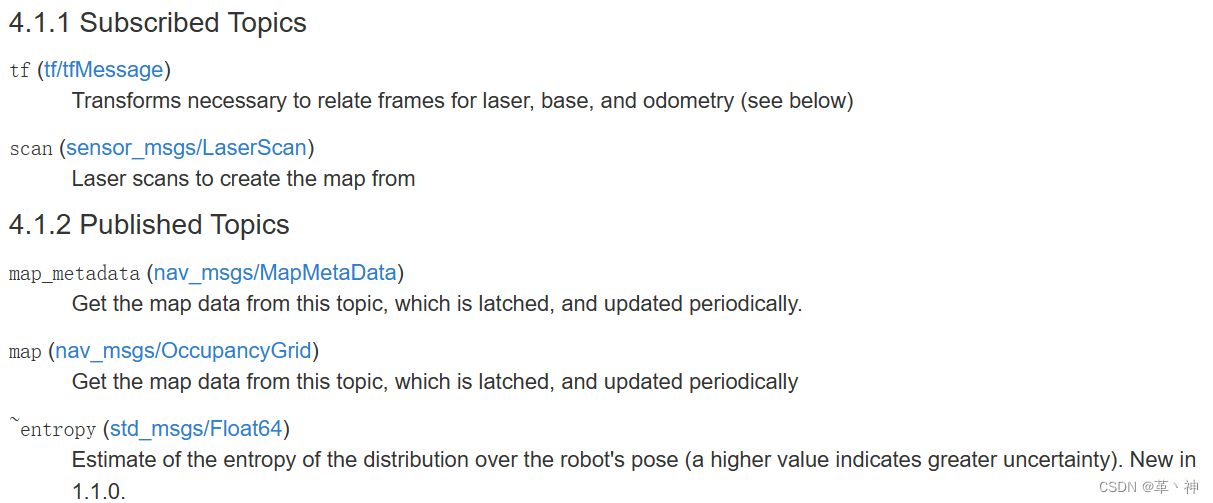
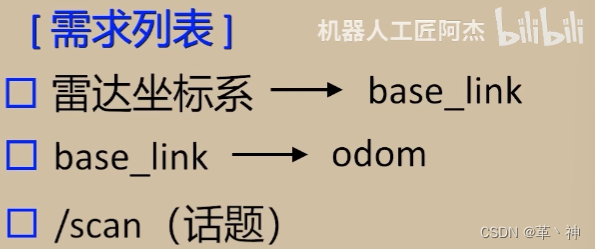
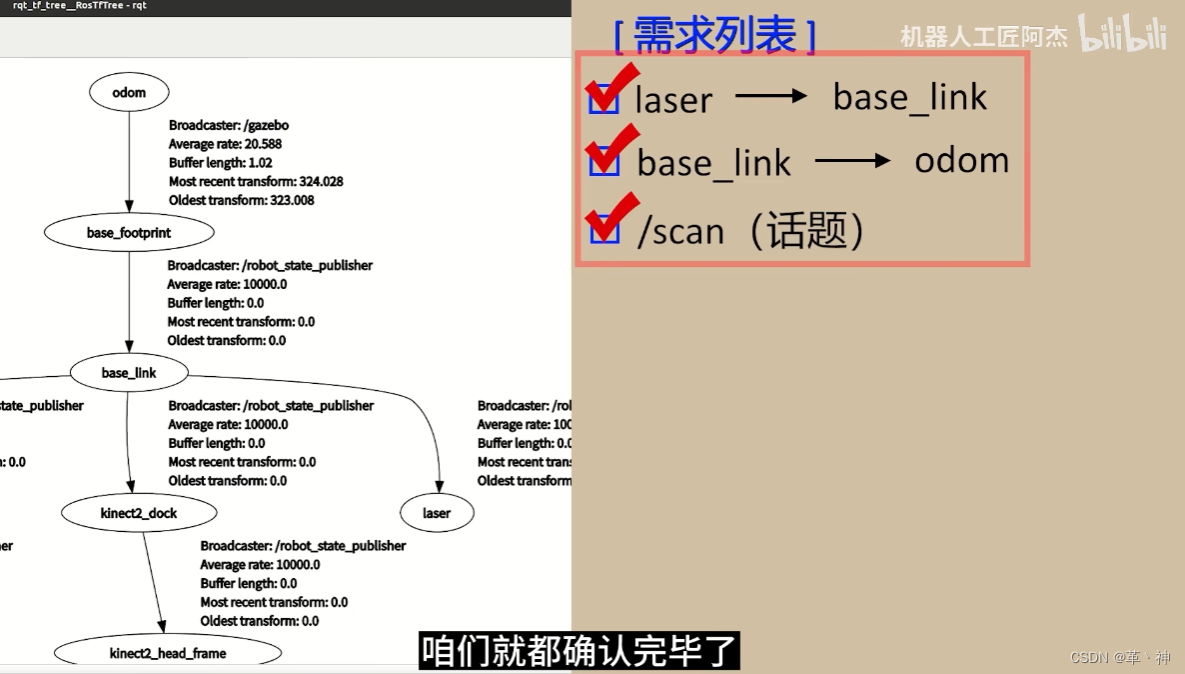
订阅中:必须的tf关系列表


gmapping的输如:
gmapping的输出:
地图的基本信息:地图加载时间,地图分辨率,地图的宽和高,地图的原点坐标
地图的占据栅格地图数据:可以在rviz显示
机器人定位的置信度:越大定位错误可能性越大
map到odom的tf关系
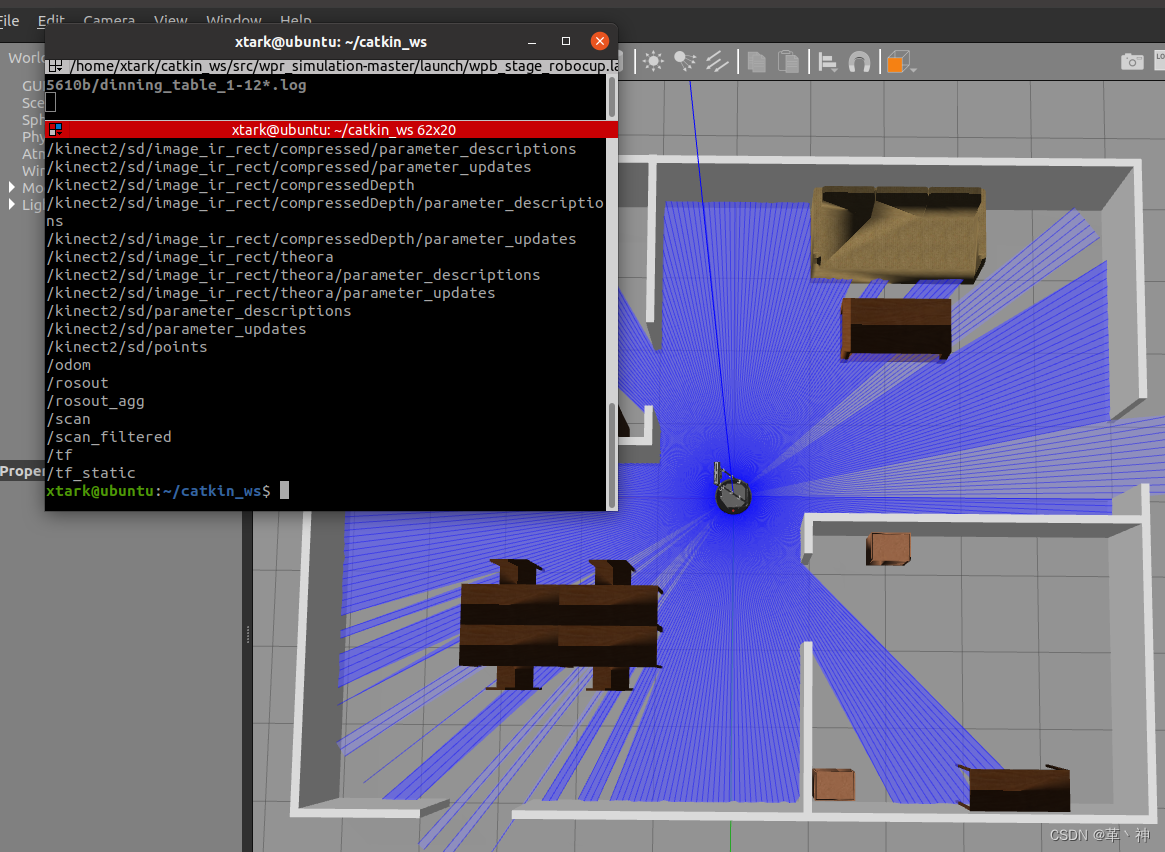
运行大佬给的仿真
//模拟RoboCub@Home家庭服务机器人比赛的一个场景
roslaunch wpr_simulation wpb_stage_robocup.launch
rostopic list
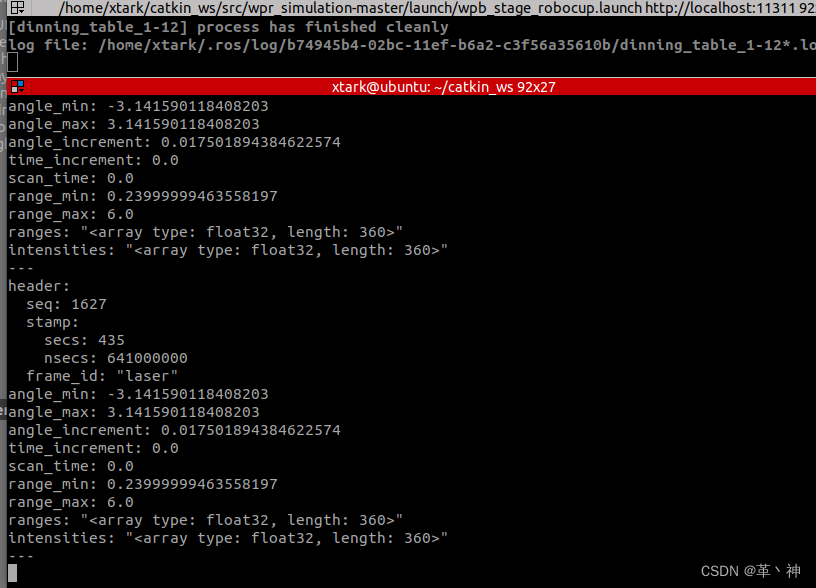
rostopic echo /scan --noarr
rosrun rqt_tf_tree rqt_tf_tree
运行Gmapping建图
roslaunch wpr_simulation wpb_stage_robocup.launch
rosrun gmapping slam_gmapping
rviz
rosrun wpr_simulation keyboard_vel_ctrl
使用launch运行
<launch>
<!--$(find wpr_simulation) 相当于 ~/catkin_ws/src/wpr_simulation-->
<!--如果在实体机上运行,需要将这个launch文件换成机器人启动的launch文件-->
<include file="$(find wpr_simulation)/launch/wpb_stage_robocup.launch"/>
<node pkg="gmapping" type="slam_gmapping" name ="slam_gmapping">
<param name="map_update_interval" value="0.5"/>
<param name="linearUpdate" value="0.1"/>
</node>
<node pkg="rviz" type="rviz" name ="rviz" args="-d $(find slam_pkg)/rviz/slam.rviz"/>
<node pkg="wpr_simulation" type="keyboard_vel_ctrl" name ="keyboard_vel_ctrl"/>
</launch>
Gmapping的参数
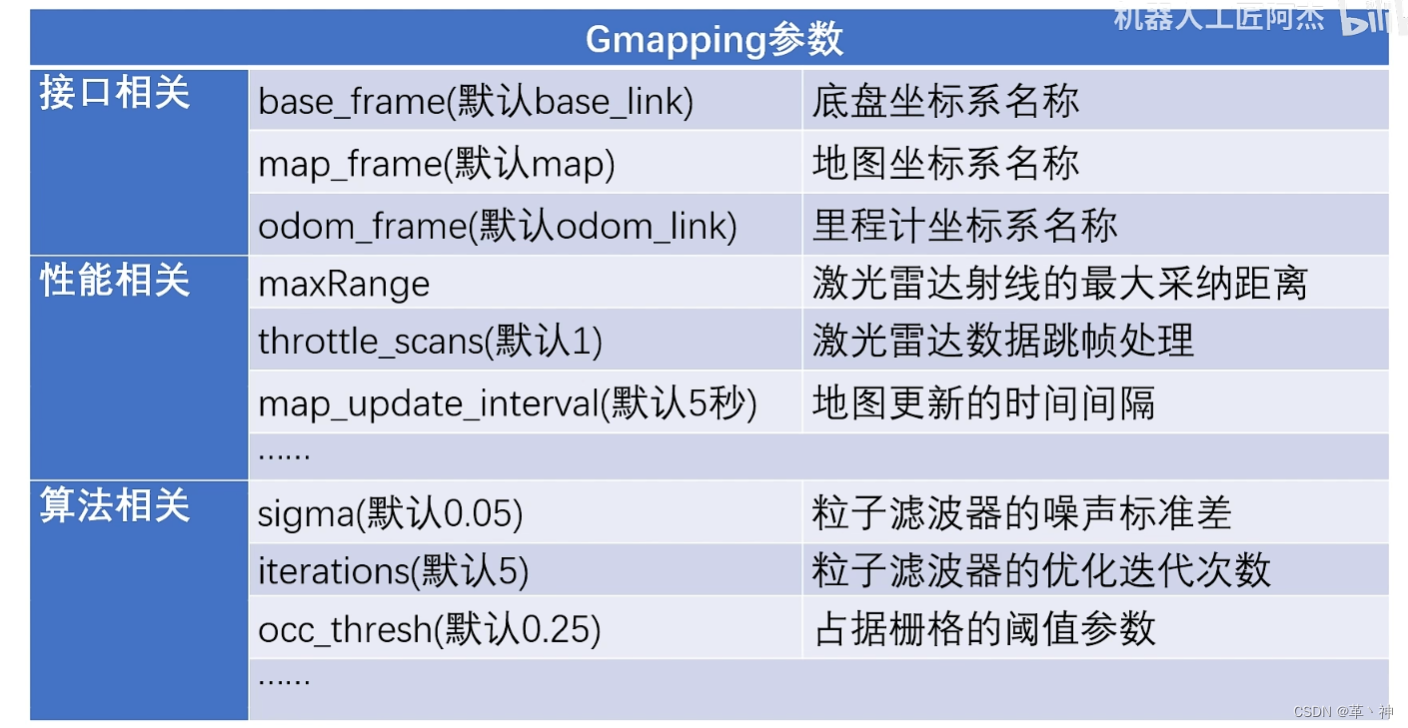
接口相关,可以修改如果tf名称不一样可以进行设置自定义的tf树名称
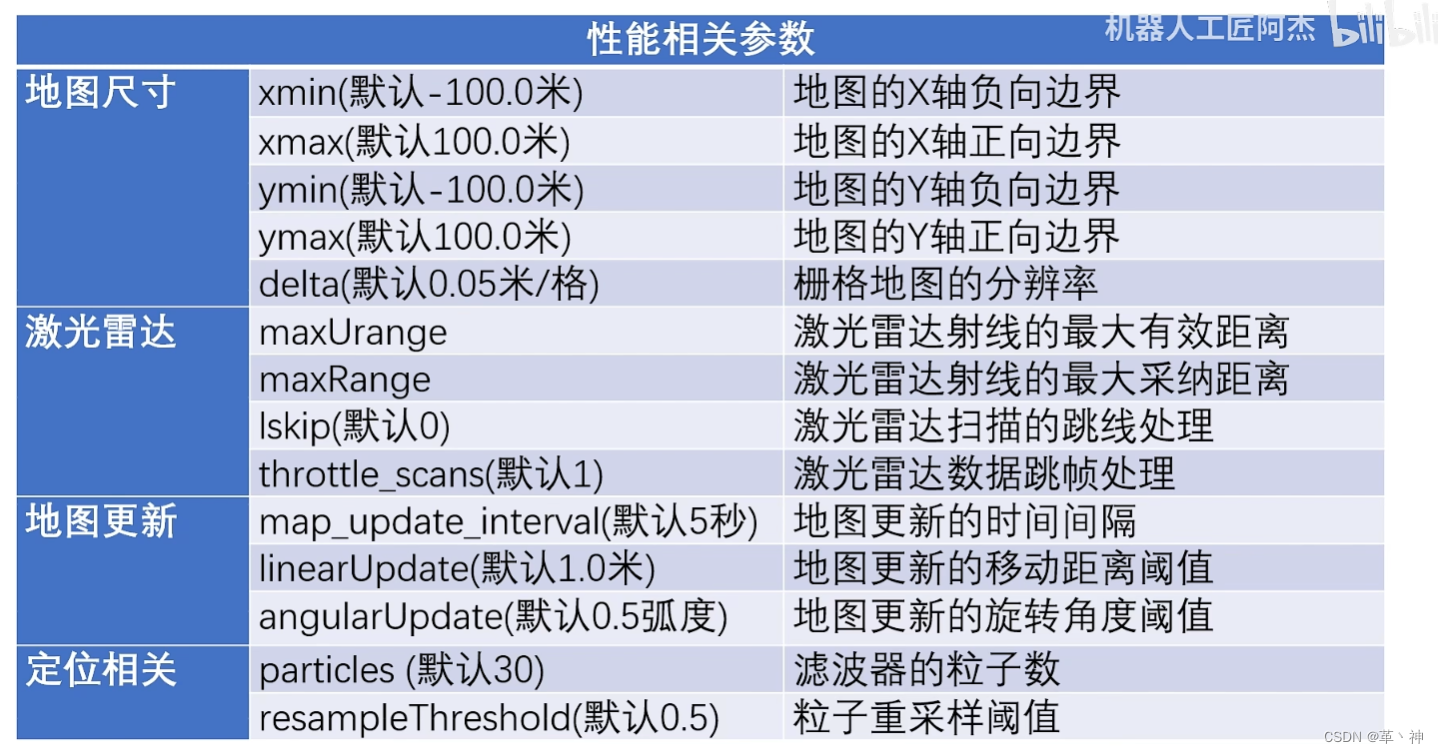
性能参数,可以在树莓派等底算力的设备上运行,只是损失了一些精度(一般调iskip和throttle_scans的值)















 3345
3345











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









