






✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
⛄ 内容介绍
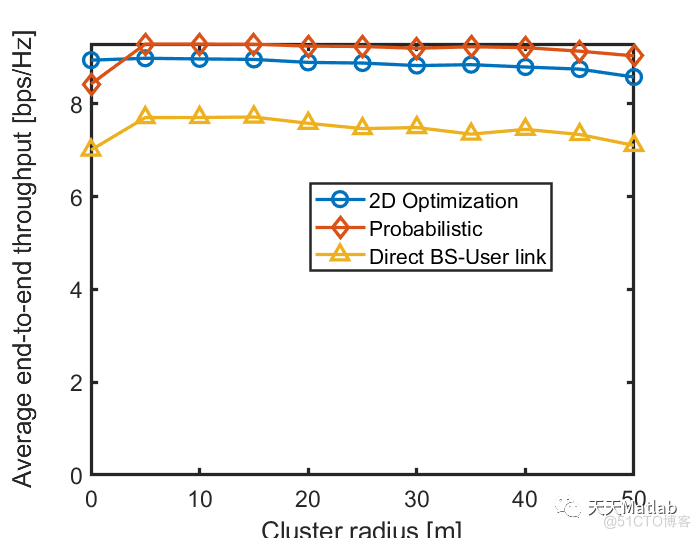
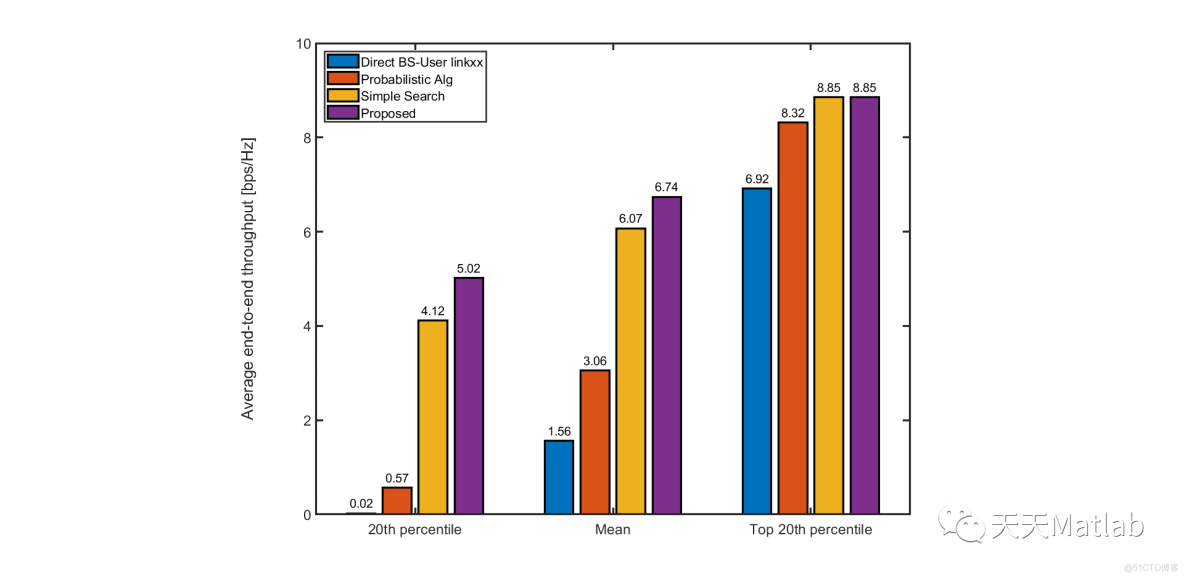
本文研究了无线网络中无人驾驶飞行器(UAV)的最佳放置问题。无人机作为一个飞行的无线中继器,为基站(BS)提供覆盖范围的扩展,并为被障碍物遮挡的用户提供容量提升。虽然现有的方法依赖于直接传播链路的潜在阻塞的统计模型,但我们提出了一种能够利用当地地形信息来提供性能保证的方法。所提出的方法允许在最小化到地面终端的传播距离和发现良好的传播条件之间进行最佳权衡。该算法只需要几个传播参数,但它能够避免深度传播阴影,并被证明能够找到全球最佳的无人机位置。只需要对目标区域进行局部探索,而且搜索轨迹的最大长度与地理尺度成线性关系。因此,它适合于在线搜索。与其他基于统计传播模型的定位方法相比,发现有明显的吞吐量提高。
⛄ 部分代码
% Massive simulation
clear
addpath(genpath('lib')),
Nue = 10000; % <- reduce this number to shorter simulation time (coarser results)
DATA = load('citymap/urbanMapSingleUserK2.mat');
U = DATA.U; PosBS = DATA.PosBS;
DATA = load('citymap/losStatistics.mat');
losStat.Plos = DATA.Plos;
losStat.ElvAngles = DATA.ElvAngles;
clear DATA
load('citymap/topologyK2.mat');
U.K = 2;
if U.K == 2
U.Alpha = [-21.4, -30.3];
U.Beta =[-36.92, -38.42];
elseif U.K == 3
U.Alpha = [-22, -28, -36];
U.Beta =[-28, -24, -22];
else
error('K should be 2 or 3.');
end
U.A0 = -20.8; U.B0 = -38.5;
U.A1 = U.Alpha(1); U.B1 = U.Beta(1);
U.A2 = U.Alpha(2); U.B2 = U.Beta(2);
Noise_dBm = -80;
Power_BS_dBm = 33;
Power_UAV_dBm = 33;
U.Noise = 10^(Noise_dBm/10) / 1000; % Watt in linear scale
U.Pb = 10^(Power_BS_dBm/10) / 1000;
U.Pd = 10^(Power_UAV_dBm/10) / 1000;
U.Hbs = 45; % meter, BS height
U.Hmin = 45; % meter, minimum UAV operation height
U.Hdrone = 50; % meter, UAV search height
stepSizeMeter = 5; % UAV search step size
fun = @(x,y) max(-log2(1 + U.Pd * real(x)), -log2(1 + U.Pb * real(y)));
fun0 = @(x) -log2(1 + U.Pb * x);
% Ergodic capacity
SNRs_dB = -10:2:20; Ks_dB = [9, -Inf];
Rerg = capacity_ergodic(Ks_dB, SNRs_dB);
fun1 = @(x,y) max(- max(0, ppval(spline(SNRs_dB, Rerg(1, :)), 10 * log10(U.Pd * real(x)))), ...
- log2(1 + U.Pb * real(y))); % UAV-UE_LOS(K-factor = 9dB,
fun2 = @(x,y) max(- max(0, ppval(spline(SNRs_dB, Rerg(2, :)), 10 * log10(U.Pd * real(x)))), ...
- log2(1 + U.Pb * real(y))); % UAV-UE_NLOS, Rayleigh fading
%%
N_scheme = 6;
tic
Nue = min(size(Topology, 1), Nue);
Rates0 = zeros(Nue, N_scheme);
strongUserIds = zeros(Nue, 1);
failIds = zeros(Nue, 1);
parfor i = 1:Nue
PosUE = Topology{i}.PosUE;
Blds = Topology{i}.Blds;
BldTypes = Topology{i}.BldTypes;
BldLines = Topology{i}.BldLines;
BldHeight = Topology{i}.BldHeight;
Nbld = size(Blds, 1);
los = IsLosK(PosUE, [PosBS, U.Hbs], BldLines, BldHeight, U.Hdrone, BldTypes);
if los == 1
strongUserIds(i) = 1;
% continue % We are only interested in the case where the direct BS-user link is blocked
end
urbanMap = struct();
urbanMap.BldLines = BldLines;
urbanMap.BldHeight = BldHeight;
urbanMap.BldTypes = BldTypes;
% Direct BS-user link
k = round((1 - los) * (U.K - 1) + 1); % propagation segment index
d = norm([PosBS, U.Hbs] - [PosUE, 0], 2);
snr = 10 ^ ((U.Alpha(k) * log10(d) + U.Beta(k)) / 10) / U.Noise;
F0 = fun0(snr);
try
% [Fmin3, Xhat3] = finduavpos3d(PosUE, PosBS, U, fun, stepSizeMeter, urbanMap);
% Fmin3 = min(Fmin3, F0);
Fmin3 = 0;
[~, Xhat2] = finduavpos(PosUE, PosBS, U, fun, stepSizeMeter, urbanMap);
los = IsLosK(PosUE, [Xhat2, U.Hdrone], BldLines, BldHeight, U.Hdrone, BldTypes);
Fmin2 = getcostf2DK_ergodic([Xhat2, U.Hdrone], [PosUE, 0], [PosBS, U.Hbs], los, U, fun1, fun2);
% Fmin2 = min(Fmin2, F0);
[~, Xhat1] = finduavpos1d(PosUE, PosBS, U, fun, stepSizeMeter, urbanMap);
los = IsLosK(PosUE, [Xhat1, U.Hdrone], BldLines, BldHeight, U.Hdrone, BldTypes);
Fmin1 = getcostf2DK_ergodic([Xhat1, U.Hdrone], [PosUE, 0], [PosBS, U.Hbs], los, U, fun1, fun2);
% Fmin1 = min(Fmin1, F0);
% [Fmin_exhst, Xhat_exhst] = finduavpos2d_exhst(PosUE, PosBS, U, fun, stepSizeMeter, urbanMap);
Fmin_exhst = Fmin3;
[~, XhatStat] = finduavposStat(PosUE, PosBS, U, fun, stepSizeMeter, urbanMap, losStat);
los = IsLosK(PosUE, [XhatStat, U.Hdrone], BldLines, BldHeight, U.Hdrone, BldTypes);
FminStat = getcostf2DK_ergodic([XhatStat, U.Hdrone], [PosUE, 0], [PosBS, U.Hbs], los, U, fun1, fun2);
% FminStat = min(FminStat, F0);
catch
Fmin1 = 0;
Fmin2 = 0;
Fmin3 = 0;
Fmin_exhst = 0;
FminStat = 0;
failIds(i) = 1;
end
Rates0(i, :) = - [F0, FminStat, Fmin1, Fmin2, Fmin3, Fmin_exhst];
end
toc
%% Plot results
my_line_styles = {'-', '--', '-.', ':'}.';
Alg_scheme_name = {
'Direct BS-User linkxx'
'Probabilistic Alg'
'Simple Search'
'Proposed'
'Proposed (3D)'
'Exhaustive'
};
schemes_to_show = [1 2 3 4 6];
N_scheme_to_show = length(schemes_to_show);
validUserId = failIds < 1;
Rates = Rates0(validUserId, :);
Nue = size(Rates, 1);
maxdata = max(Rates(:));
Npt = 40;
XI = sort([0.1 0.17 0.3 0.5 (0:1/(Npt - 1 - 4):1) * maxdata], 'ascend');
X_data = zeros(Npt, N_scheme_to_show);
F_data = zeros(Npt, N_scheme_to_show);
for i = 1:N_scheme_to_show
n = schemes_to_show(i);
r_vec = Rates(:, n);
[F1,X1] = ksdensity(r_vec, XI, 'function', 'cdf');
X_data(:, i) = X1(:);
F_data(:, i) = F1;
end
figure(1),
h = plot(X_data, F_data,'linewidth', 2);
set(gca, 'FontSize', 14);
legend(Alg_scheme_name{schemes_to_show}, 'location', 'southeast');
xlim([0 ceil(max(Rates(:)))]);
set(gca, 'YTick', 0:0.2:1);
xlabel('bps/Hz');
ylabel('CDF');
tune_figure,
set(h(1), 'linewidth', 2);
set(h(1), 'Marker', '*', 'Markersize', 6);
set(h(1), 'LineStyle', ':');
set(h(2), 'LineStyle', '-.');
set(h(3), 'LineStyle', ':');
set(h(4), 'LineStyle', '-');
set(h(4), 'LineWidth', 3);
set(h(5), 'linestyle', '--');
set(h(5), 'LineWidth', 3);
% ----
schemes_to_show = [1 2 3 4];
figure(2),
rateNoUav = Rates(:, 1);
[~, sortedIndex] = sort(rateNoUav, 'ascend');
low20percentileIndex = sortedIndex(1:round(Nue * 0.2));
high20percentileIndex = sortedIndex(round(Nue * 0.8): end);
RateLow = mean(Rates(low20percentileIndex, schemes_to_show), 1);
RateMean = mean(Rates(:, schemes_to_show), 1);
RateHigh = mean(Rates(high20percentileIndex, schemes_to_show), 1);
h = bar([RateLow
RateMean
RateHigh]);
set(gca, 'FontSize', 14);
set(h, 'linewidth', 2);
ylim([0, 10]);
legend(Alg_scheme_name{schemes_to_show}, 'location', 'northwest');
set(gca, 'XTickLabel', {'20th percentile', 'Mean', 'Top 20th percentile'});
set(gca, 'YTick', 0:2:10);
ylabel('Average end-to-end throughput [bps/Hz]');
% label the bars
Xdata = [RateLow
RateMean
RateHigh];
bartext = [];
for i = 1:size(Xdata, 1)
for j = 1:size(Xdata, 2)
bartext(i, j) = text(i + (j - 2.5) * 0.18, Xdata(i, j) + 0.05, ...
sprintf('%1.2f', Xdata(i, j)), 'fontsize', 12);
end
end
% Use the handles TH to modify some properties
set(bartext,'Horizontalalignment','center',...
'verticalalignment','bottom') ;
tune_figure,
[im_hatch,colorlist] = applyhatch_pluscolor(gcf,'\-x./+',0,0,[],150,2,2);
⛄ 运行结果
⛄ 参考文献
[1] Chen J , Gesbert D . Efficient Local Map Search Algorithms for the Placement of Flying Relays:, 10.48550/arXiv.1801.03595[P]. 2018.















 1629
1629











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









