






Tsinghua-MARS-Lab/InterSim (github.com)![]() https://github.com/Tsinghua-MARS-Lab/InterSim
https://github.com/Tsinghua-MARS-Lab/InterSim
下载 NuPlan 数据集,安装 NuPlan 的 API
安装 — nuplan-devkit v0.1 文档![]() https://nuplan-devkit.readthedocs.io/en/latest/installation.html
https://nuplan-devkit.readthedocs.io/en/latest/installation.html
nuplan(面向自动驾驶规划的开源数据集)——ubuntu中的安装与配置-CSDN博客
MetaDrive自动驾驶仿真播放nuplan数据集 - 知乎 (zhihu.com)
安装 miniconda
请参阅 Miniconda 官方页面。
创建 Conda 环境
我们使用 environment.yml 创建一个新的 Conda 环境。需要c盘有20g空间
conda env create -f environment.yml
E:\培训\InterSim_backup\nuplan-devkit-nuplan-devkit-v1.0路径下
报错1

解决:重装python=3.9
conda install python=3.9
报错2
问题:磁盘空间不足,但没把miniconda安装在c啊?

网上说是/tmp的原因,于是改临时路径:(没起作用)
如果您只是想在特定的命令行会话中更改临时目录的路径,而不是永久更改系统级别的环境变量,您可以使用以下命令set TMP=E:\intersim这将在当前命令行窗口中更改临时目录的路径。但是,请注意,这种更改仅在当前命令行会话中有效,关闭该会话后将恢复为默认的临时目录路径。echo %TMP%查看临时目录的路径
解决:
C:\Users\Administrator\AppData\Local\Temp
执行conda env create -f environment.yml时临时空间存了17G,所以c盘空间不足了。
由此,把temp临时文件存储位置改到其他磁盘:(也可以给c分盘)
C盘清理教程丨更改Temp文件夹储存路径的方法-『白云居』 (baiyunju.cc)
至此彻底解决conda装虚拟环境造成c盘空间不足的情况。
环境创建成功
import nuplan验证成功

指令总结:
创建:conda env create -f environment.yml
更新:conda env update --name nuplan --file environment.yml --prune
激活:
conda activate nuplan
关闭:conda deactivate删除:conda env remove -n nuplan
清理:conda clean --all
intersim部分
在intersim/simulator 文件夹执行
python setup.py install
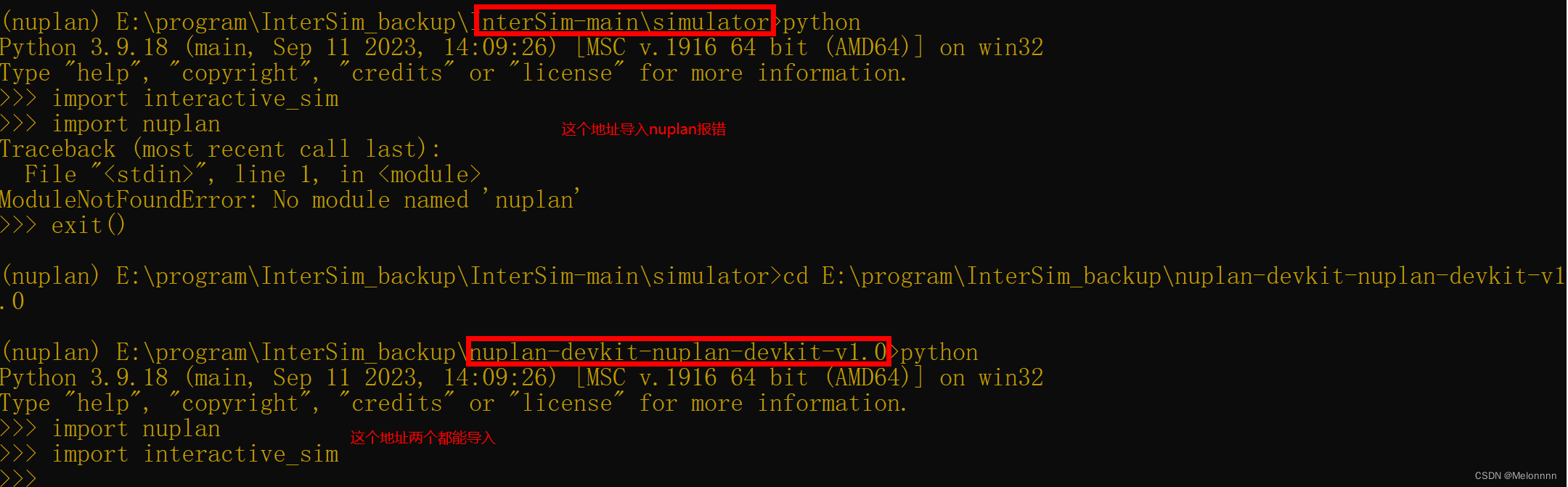
import interactive_sim验证成功
执行python sim.py --max_scenarios 5
报错:ModuleNotFoundError: No module named ‘fcntl’
解决:miniconda3\envs\Lib下新建一个fcntl.py文件
(放在python/python39/Lib下是没用的)
内容:
def fcntl(fd, op, arg=0):
return 0
def ioctl(fd, op, arg=0, mutable_flag=True):
if mutable_flag:
return 0
else:
return ""
def flock(fd, op):
return
def lockf(fd, operation, length=0, start=0, whence=0):
return
其他报错:
创建虚拟环境报错 循环依赖,ResolutionTooDeep:200000。
解决:将环境分条配置。
(期间update了pip(好像不是重点,因为后来又装回了21.2.4版本的pip)。)
conda create --name nuplan python=3.9 pip=21.2.4
conda activate nuplan
conda install nb_conda_kernels
pip install -r requirements_torch.txt
pip install -r requirements.txt 原yml文件:
name: nuplan
dependencies:
- python=3.9
- pip=21.2.4
- nb_conda_kernels
- pip:
- -r requirements_torch.txt
- -r requirements.txt
(之前在requirement.txt里删了tqdm,不知道有啥影响没有。)
如果报错有关SQLAlchemy:
raise sa_exc.ArgumentError(
sqlalchemy.exc.ArgumentError: Type annotation for “Scene.goal_ego_pose” can’t be correctly interpreted for Annotated Declarative Table form. ORM annotations should normally make use of the `Mapped[]` generic type, or other ORM-compatible generic type, as a container for the actual type, which indicates the intent that the attribute is mapped. Class variables that are not intended to be mapped by the ORM should use ClassVar[]. To allow Annotated Declarative to disregard legacy annotations which don’t use Mapped[] to pass, set “allow_unmapped = True” on the class or a superclass this class. (Background on this error at: Error Messages — SQLAlchemy 2.0 Documentation)
就改SQLAlchemy版本
注意:官方nuplan-devkit提供的依赖包grpcio与SQLAlchemy版本存在缺失,应当分别安装SQLAlchemy-1.43.0版本与SQLAlchemy-1.4.27版本安装包,因此还需运行以下两行代码以确保版本正确,否则后续运行nuplan会出现bug。
pip install grpcio==1.43.0
pip install SQLAlchemy==1.4.27
不过grpcio要求1.48.2以上
nuplan&intersim配好之后:
执行sim.py
报错找不到nuplan module
Traceback (most recent call last):
File “E:\program\InterSim_backup\InterSim-main\simulator\sim.py”, line 194, in <module>
from nuplan.database.nuplan_db_orm.nuplandb_wrapper import NuPlanDBWrapper
ModuleNotFoundError: No module named ‘nuplan’
解决:gpt说,在sim.py中,将 `nuplan` 模块所在的路径添加到 Python 解释器的搜索路径中。添加以下代码:
import sys
sys.path.append('E:/program/InterSim_backup/nuplan-devkit-nuplan-devkit-v1.0')
报错找不到指定路径:
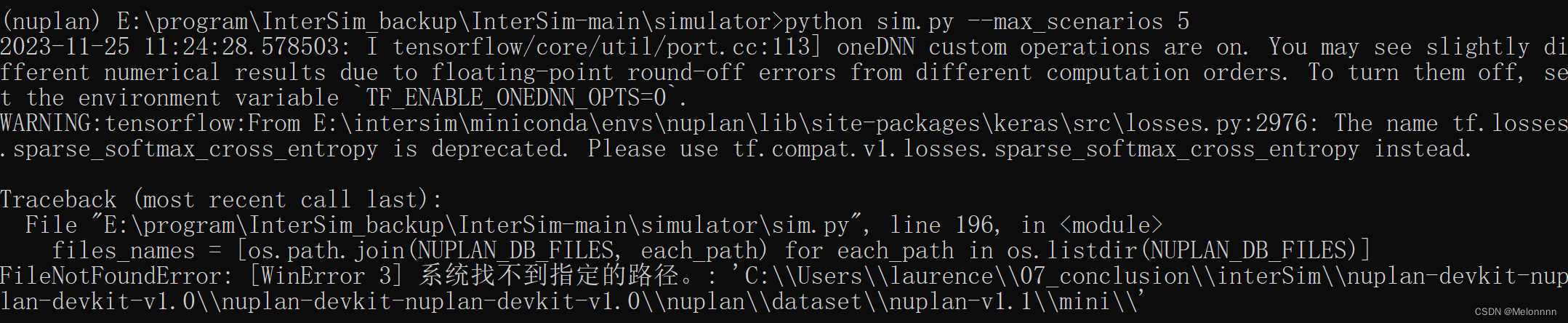
解决:
修改sim.py和DataLoaderNuPlan.py中的三个路径(dataset,maps,mini)
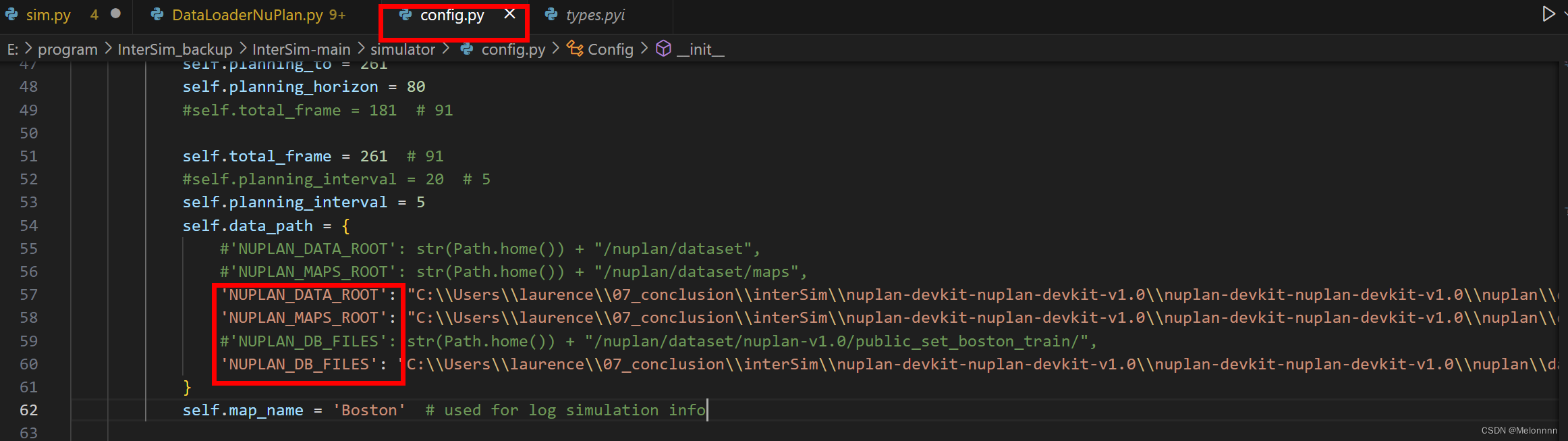
后来发现这个C盘路径是在config.py里指定的,应该只需要修改这一个文件里的路径:
运行sim.py结果:
github上说
python sim.py --max_scenarios 5
此命令将运行一系列涵盖 5 个场景的快速模拟。模拟完成后,InterSim将使用我们的默认指标打印仿真结果。如果未发生错误,命令行会打印"simulation finished!"
sqlalchemy.exc.InvalidRequestError: No listeners found for event <class 'nuplan.database.nuplan_db_orm.category.Category'> / 'load' / <bound method Table._decorate_record of Category(7 entries):
修改runningmode
0:一直在进行2-63场景
1:无可视化界面
2:可以接着进行到2-67场景(设置了最大场景数5),并产生playback文件,但没出现finish
















 3882
3882











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









