






写在前面,主要参考以下这篇文章,并复现了其中几种后轮转角控制方法。
一、什么是四轮转向
顾名思义,四轮转向指的是四个轮子都能转向,都能转动。当驾驶员操作方向盘进行前轮转向时,后轮按照特定算法给出的转角跟着转动。
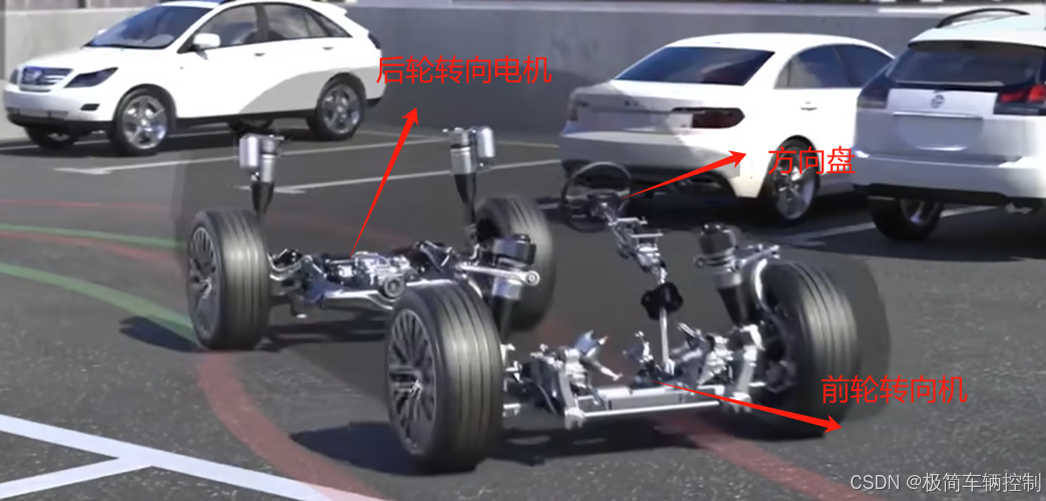
电气化时代,为了能实现后轮转向,通常是在后轴上也安装一套转向电机,前轮转向和后轮转向电机通过一个控制器协同控制。正常情况下,前轮转角最大能达40°,而后轮转向后轮转角最大10°左右,转向上后轮是辅助。

二、四轮转向的好处
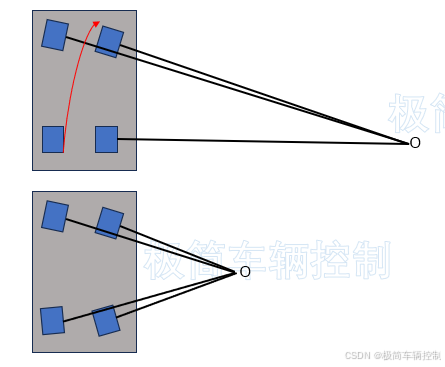
1、低速转弯时可以减少转弯半径
在低速时,后轮转向处于反向模式,既转向角度与前轮相反。如下两图所示,从几何关系上很容易看出具有后轮转向能力的车,能大幅度减少低速时的转弯半径。
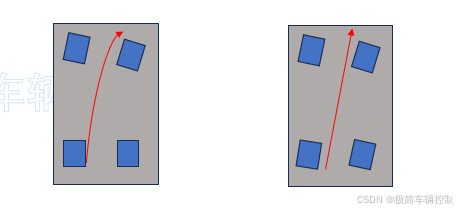
2、提高高速变道到转向稳定性
在高速时,后轮转向处于同向模式,转向角度方向与前轮相同。如下图所示,可以看出高速时,后轮同向转向可以增强车的循迹能力,从而提高转向稳定性。
从图上也可以看出,具有后轮转向能力的车转向系统有三个工作模式:
1、正常模式,既后轮转向角为0,不参与转向,与普通车一样
2、反向模式,前后轮转向角方向相反
3、同向模式,前后轮转向角方向相同。
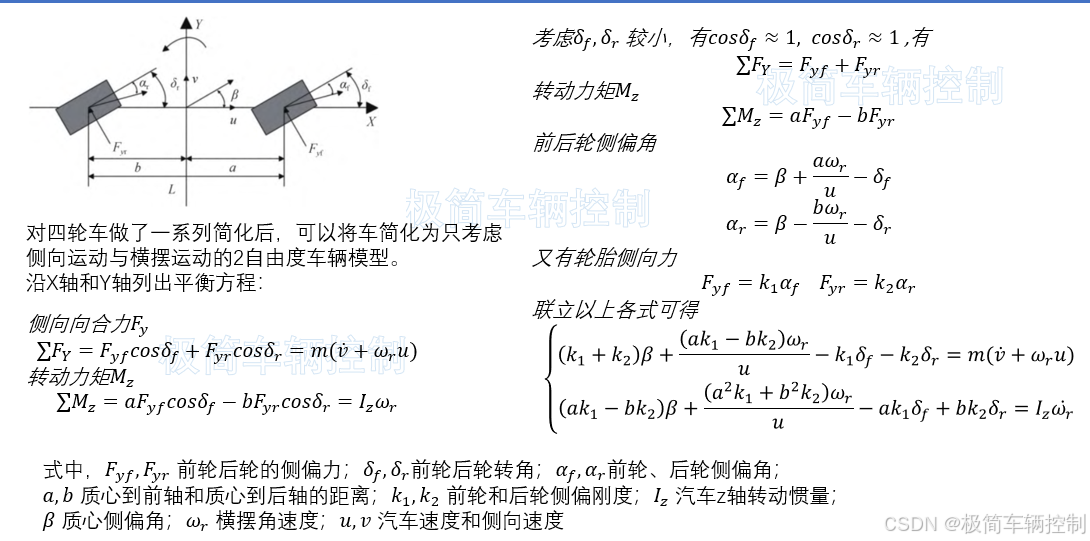
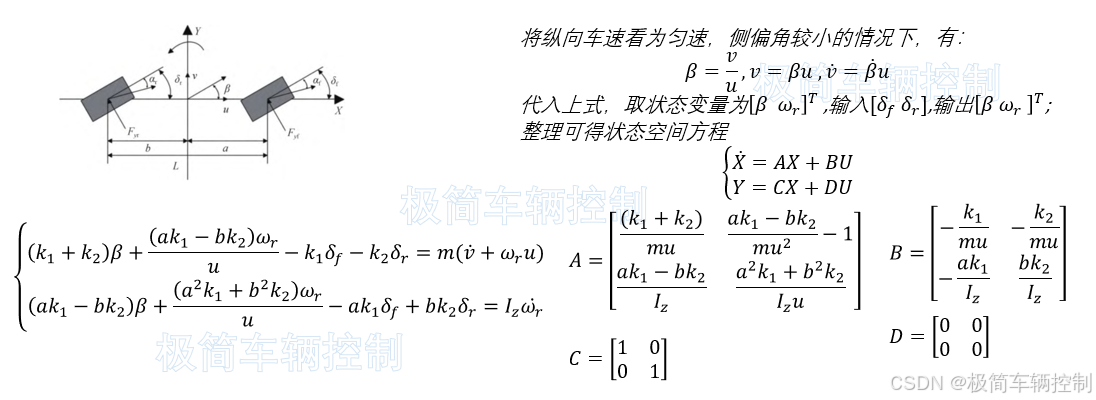
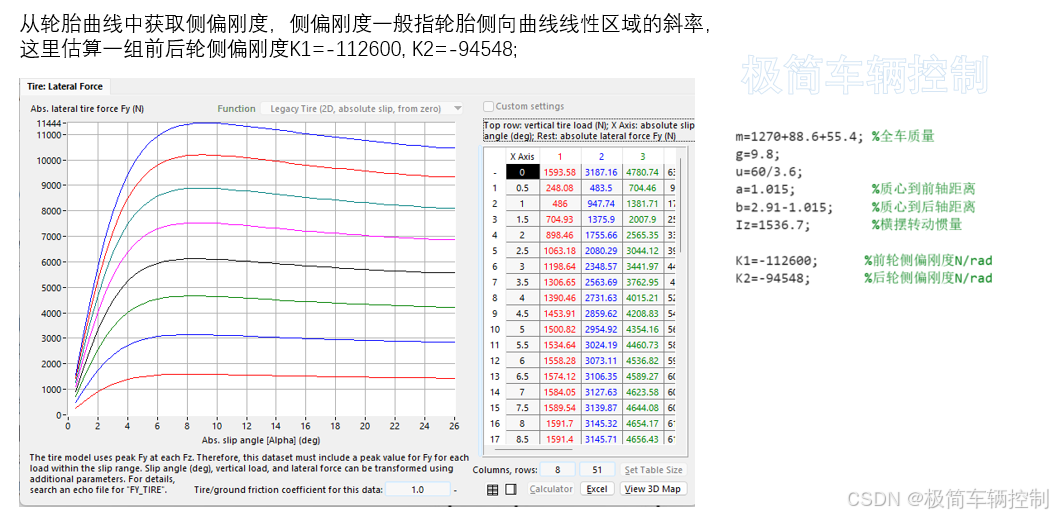
三、四轮转向动力学模型的建立
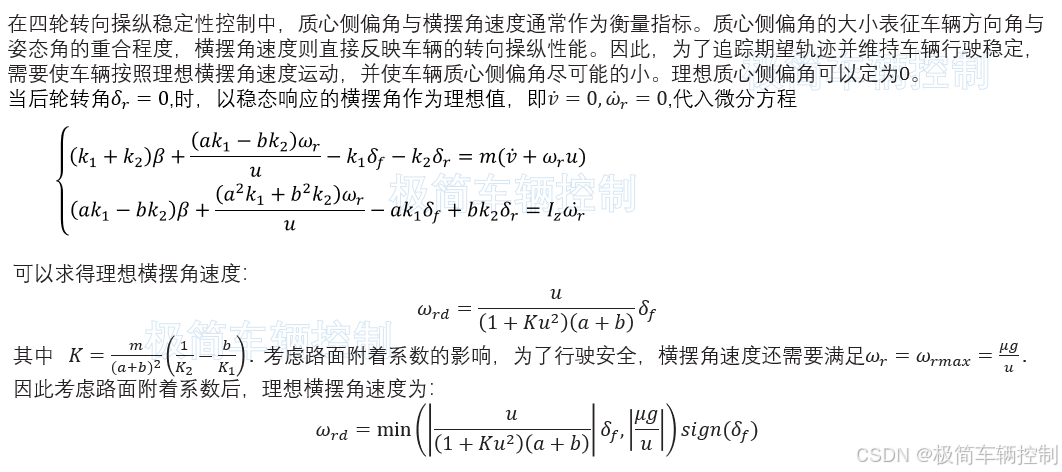
四、常见控制策略
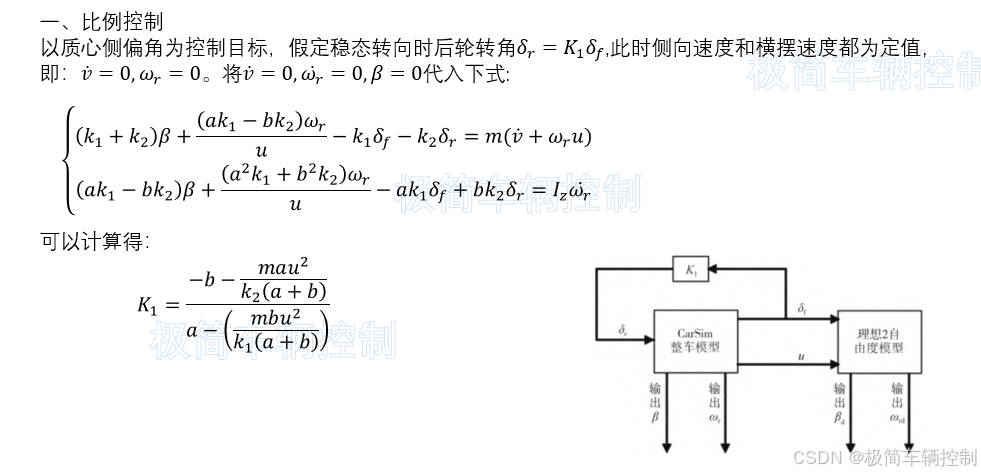
1、比例控制
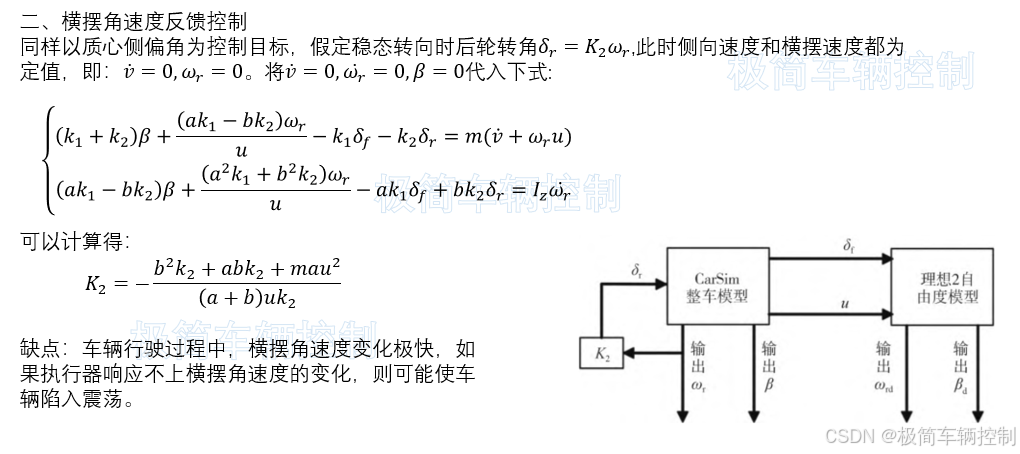
2、 横摆角速度反馈控制
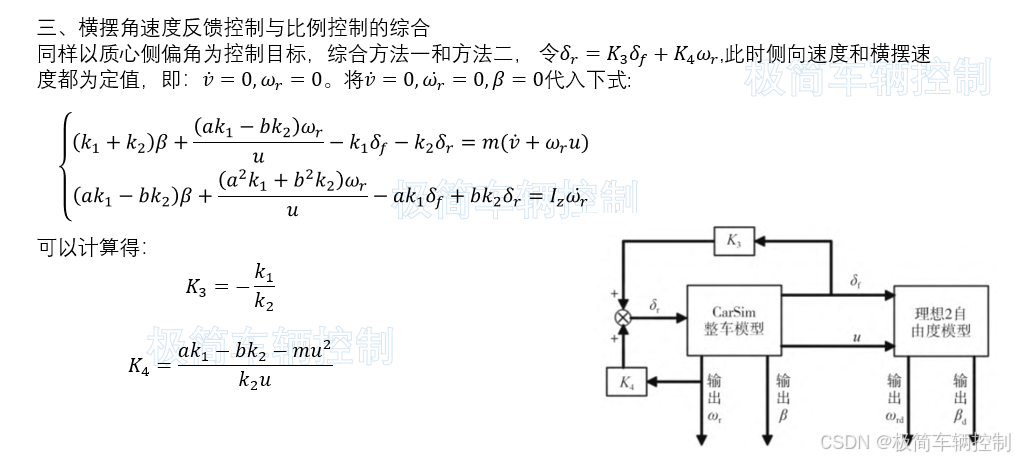
3、横摆角速度反馈与比例控制结合的综合控制
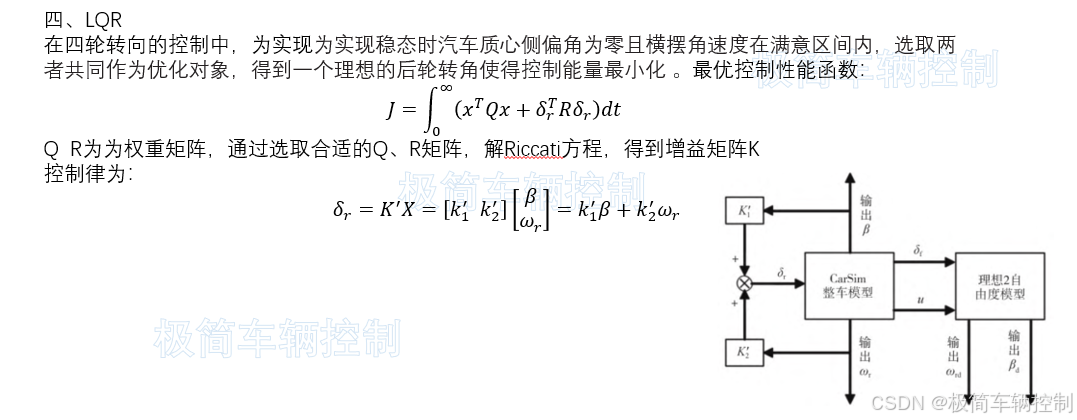
4、 LQR
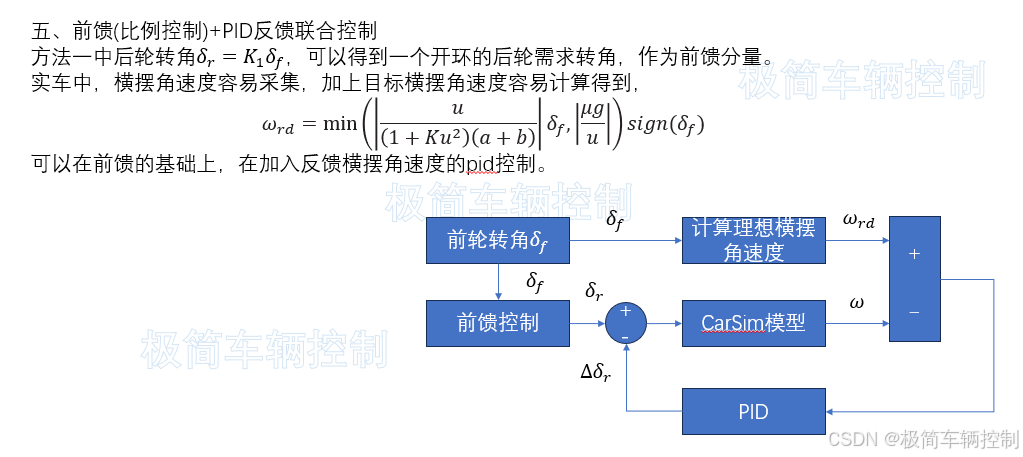
5、前馈(比例控制)+PID反馈联合控制
五、四轮转向carsim与simulink联合仿真模型建立
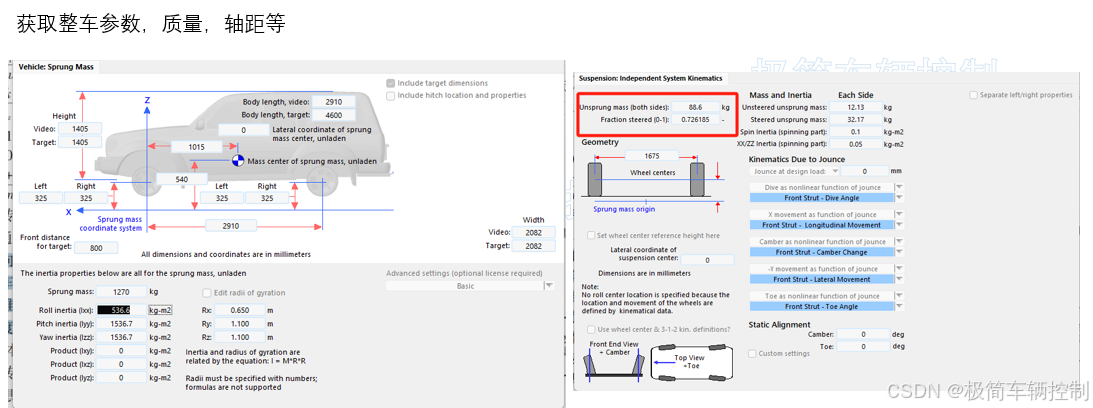
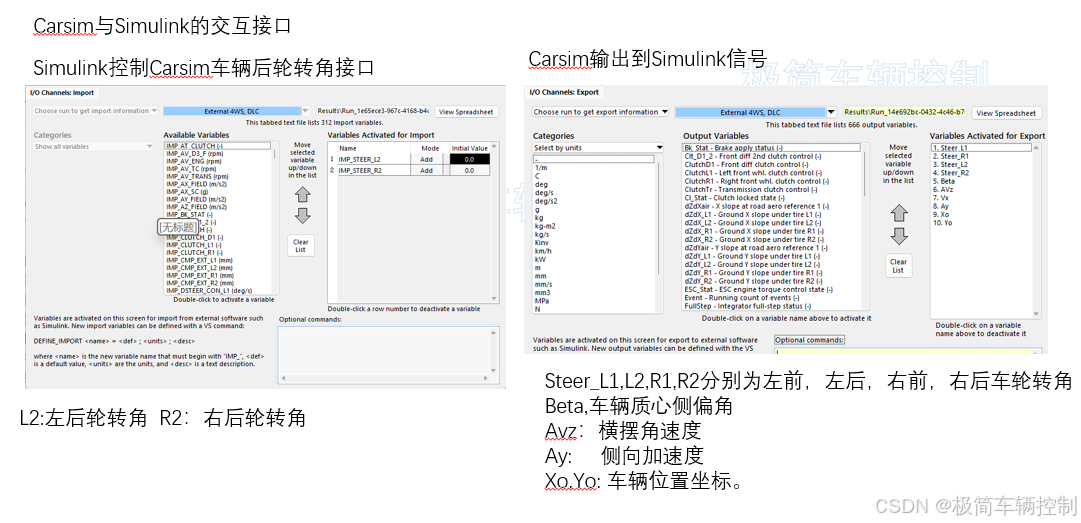
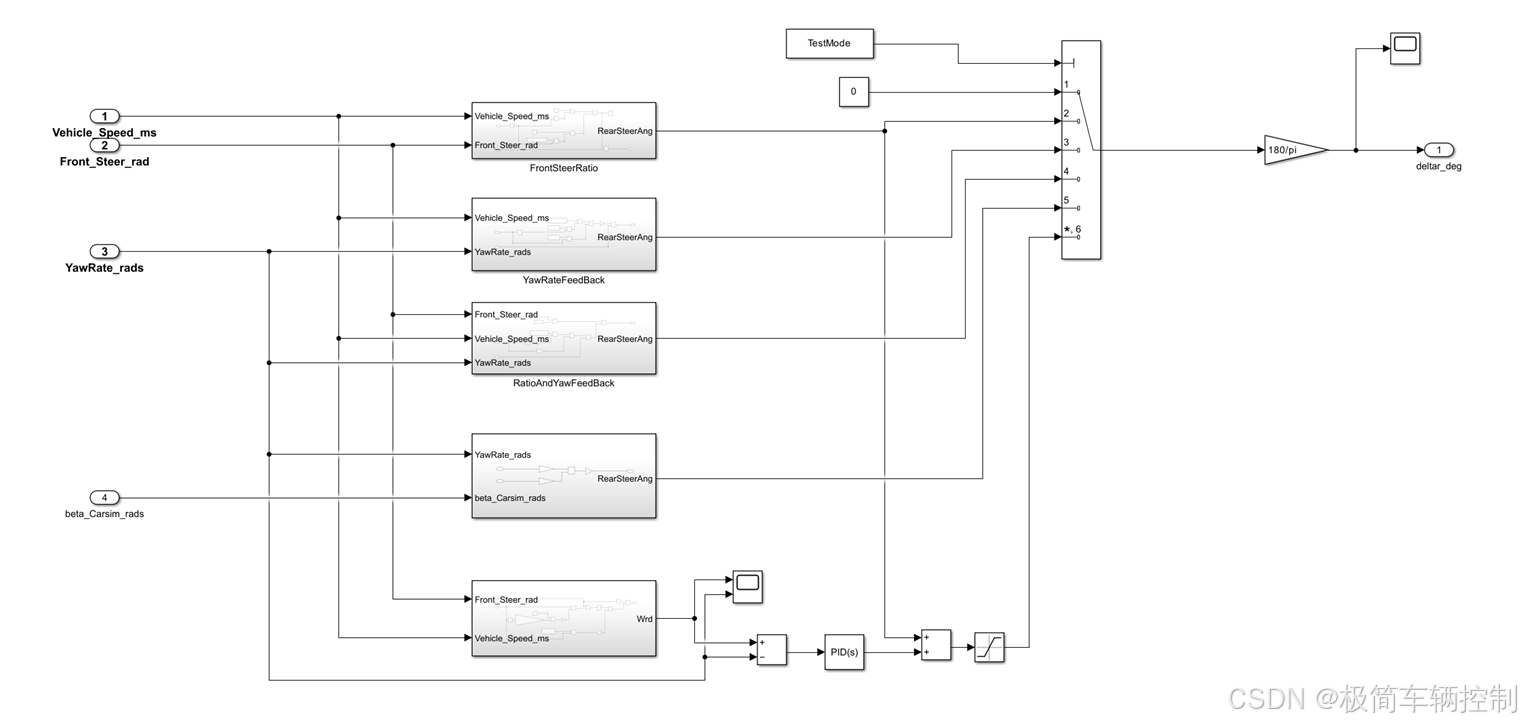
以上为carsim的配置,下图为simulink模型顶层架构。第四章提到的5种常见控制策略,在控制算法这模块中实现。
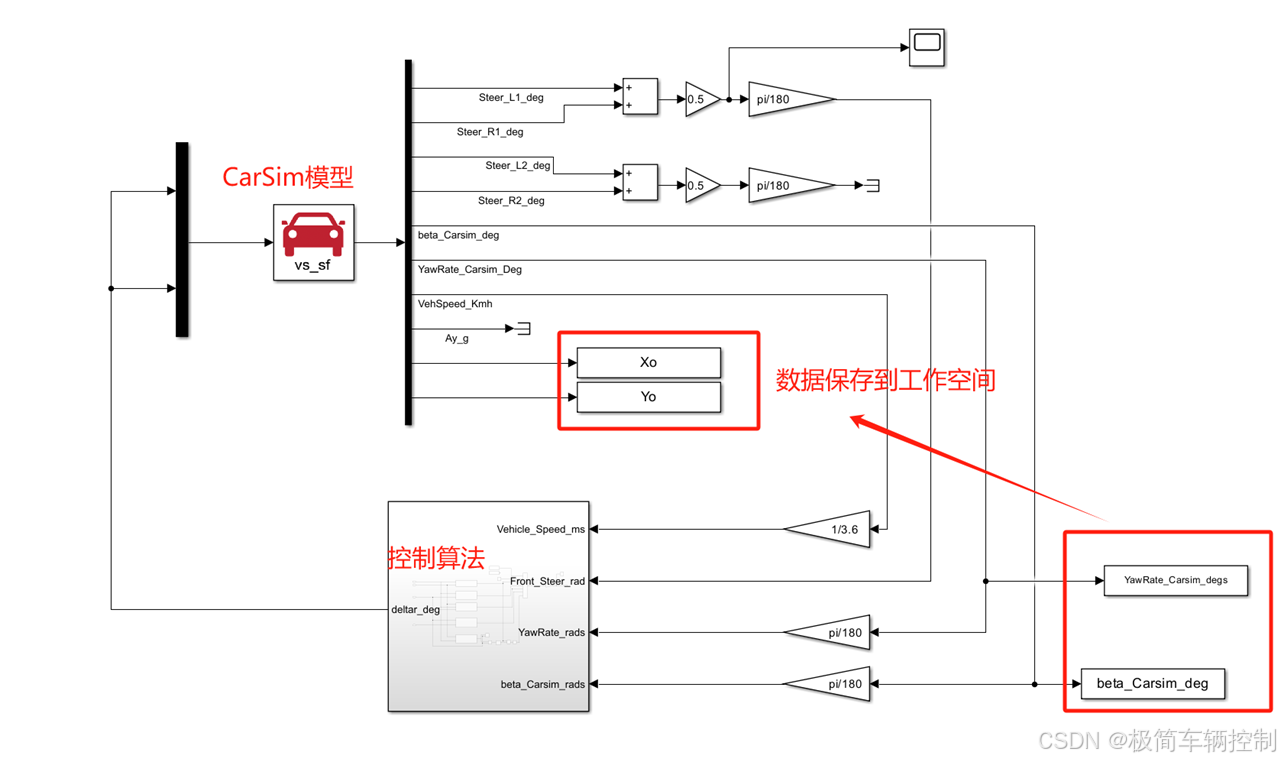
以下是控制算法模块
六、仿真结果
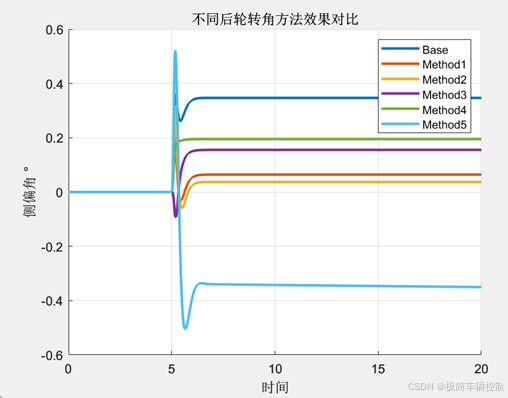
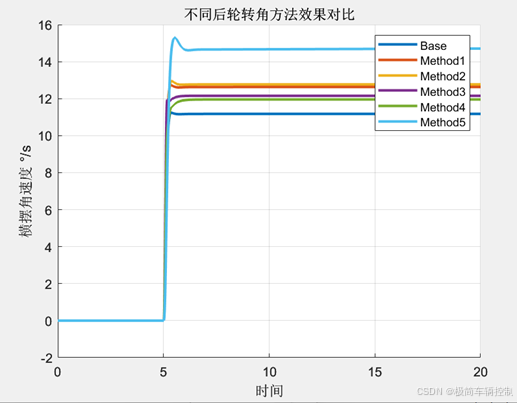
在脚本中设置了依次运行五种算法,并对比结果的程序。仿真工况是60km/h,阶跃转向。
质心侧偏角:
横摆角速度
车辆运动轨迹

从上图可以看出,方法1和方法2比较稳定,且开环的算法不会引起不稳定工况的发生,在实际使用中比较可靠。
七、模型和源码
需要模型和脚本的,还是在我的小基地 某宝店铺<极简车辆控制>上。


















 503
503

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











