







我们在之前的编程中可以发现,小乌龟程序的背景颜色是蓝色,可能大家看的比较眼乏了,那我们接下来可以编程修改小乌龟程序的背景颜色。
首先,我们输入rosparam list,可以看到三个关于小乌龟程序背景的参数:/turtlesim/background_b; /turtlesim/background_g; /turtlesim/background_r,这三个参数跟RGB色图有关。RGB色彩模式是工业界的一种颜色标准,是通过对红(R)、绿(G)、蓝(B)三个颜色通道的变化以及它们相互之间的叠加来得到各式各样的颜色。
然后我们去获取这三个参数的具体数据:rosparam get /turtlesim/background_g(b/r)。如图:

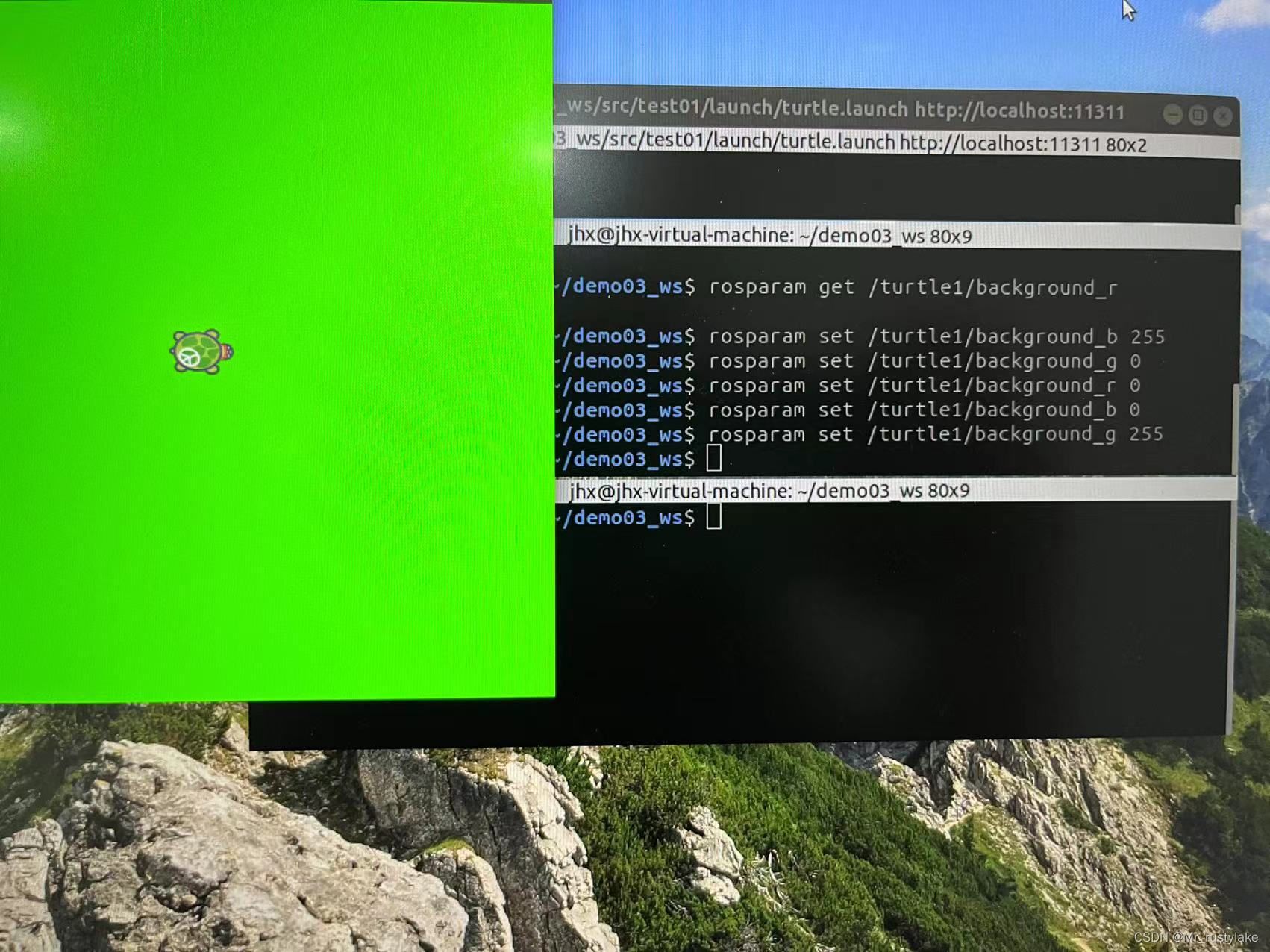
然后我们利用rosparam set /turtlesim/background_g 255, rosparam set /turtlesim/background_r 0, rosparam set /turtlesim/background_b 0 设置这三个参数的具体数据,但这个背景颜色的改变并不会马上发生改变,小乌龟程序中利用的还是上次的参数数据,我们这时候需要关闭小乌龟程序重新开启,然后就能看到小乌龟程序背景的改变。
然后我们使用第一种直接编辑的静态改变方法,创建background.cpp文件
程序如下:
#include "ros/ros.h"
int main(int argc, char *argv[]){
setlocale(LC_ALL,"");
ros::init(argc,argv,"background");
ros::NodeHandle n;
ros::param::set("/turtlesim/background_r",0);
ros::param::set("/turtlesim/background_b",0);
ros::param::set("/turtlesim/background_g",255);
return 0;
}然后我们相应改变CMakeList.txt,先运行rosrun test01 background,再运行launch,然后我们会发现,小乌龟程序背景的颜色也发生了改变
PS:不要忘记roscore,source ./devel/setup.bash,尤其是每次开启一个新的终端就需要新的source。















 4521
4521











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









