







文章目录
一、基础介绍
Eigen是用于线性代数的C ++模板库,它包含:矩阵,向量,数值求解器和相关算法。Eigen的一些官方参考资料如下,可以进行学习查阅。
1.1 安装
从理论上来说Eigen是不需要安装,因为它只有头文件,也不需要编译,所以它是跨平台的,只需要程序包含头文件即可使用。
- ubuntu
ubunt下载命令如下,Eigen头文件的默认安装位置是:“/usr/include/eigen3”.
sudo apt-get install libeigen3-dev
QT下使用:在pro文件中添加以下内容:
INCLUDEPATH += /usr/include/eigen3
关键是让qt找到eigen3的位置,window下也是一样的道理。
- windows
下载后,直接在工程中加入头文件,让程序能够找到即可。
1.2 框架
进入到Eigen目录下会发现很多头文件,它分为一个核心模块和一些其他模块。每个模块都有相对应的头文件,使用的时候包含相应的头文件即可。而Dense和Eigen一次包含了多个头文件,方便使用。
整体框架如下:
| 模块 | 头文件 | 内容 |
|---|---|---|
| Core | #include <Eigen/Core> | Matrix和Array类,基础线性代数运算、数组操作 |
| Geometry | #include <Eigen/Geometry> | 变换、平移、缩放、2D和3D的旋转(四元数,欧拉角) |
| LU | #include <Eigen/LU> | 求逆、行列式、LU分解 |
| Cholesky | #include <Eigen/Cholesky> | LLT和LDLT的cholesky分解 |
| Householder | #include <Eigen/Householder> | householder变换 |
| SVD | #include <Eigen/SVD> | SVD分解 |
| QR | #include <Eigen/QR> | QR分解 |
| Eigenvalues | #include <Eigen/Eigenvalues> | 特征值、特征向量分解 |
| Sparse | #include <Eigen/Sparse> | 稀疏矩阵存储以及基本线性代数运算 |
| Dense | #include <Eigen/Dense> | Core, Geometry, LU, Cholesky, SVD, QR, and Eigenvalues头文件 |
| Eigen | #include <Eigen/Eigen> | 包含Dense和Sparse头文件,也就是整个Eigen头文件 |
Eigen提供了两个dense的对象,都有Matrix类提供:数学矩阵和向量,如下表示:
typedef Matrix<Scalar, RowsAtCompileTime, ColsAtCompileTime, Options> MyMatrixType;
typedef Array<Scalar, RowsAtCompileTime, ColsAtCompileTime, Options> MyArrayType;
二. 矩阵基础
2.1 矩阵和向量
在Eigen中,向量只不过是矩阵的特殊类型,只有一行或者一列的矩阵。
- matrix
matrix提供了6个参数,我们一般使用前三个就可以了,options为可选项(直接使用默认就行):
Matrix<typename Scalar, int RowsAtCompileTime, int ColsAtCompileTime>
- scalar:矩阵的类型,包括float、double、int、复数float
- RowsAtCompileTime:行数
- ColsAtCompileTime:列数
matrix提供了丰富的矩阵类型,例如matrix4f,表示4*4的矩阵,如下:
typedef Matrix<float, 4, 4> Matrix4f;//4行4列,float
Eigen约定:”d”表示double类型,”f”表示float类型,”i”表示整数,”c”表示复数。
读取行和列的数量方法:
int r = matrix.rows();//行
int c = matrix.cols();//列
- 向量vectors
大多数情况下只有一列,也就是列向量。例如vector3d包含3个float的1维列向量。
typedef Matrix<float, 3, 1> Vector3f;//3行1列,float
typedef Matrix<int, 1, 2> RowVector2i;//1行,2列,int
2.2 动态矩阵
Eigen中除了定义上面固定大小的矩阵外,还有一种动态矩阵,也就是说编译的时候大小未知,在程序运行以后才确定大小。例如:
typedef Matrix<double, Dynamic, Dynamic> MatrixXd;//n行,n列。double类型矩阵。
typedef Matrix<int, Dynamic, 1> VectorXi;//动态列向量,n行1列
当然你自己也可以定义动态行向量:
Matrix<float, 3, Dynamic>//3行n列
2.3 定义
定义之前,应该写下使用空间或者在程序中手写添加Eigen,如下:
using Eigen::MatrixXd;
using Eigen::Vector2d;
- 未初始化类型
Matrix3f a;//3-by-3,float,未初始化
MatrixXf b;// n-by-n,float,未初始化
MatrixXf a(10,15);//10-by-15,float,未初始化
VectorXf b(30);//00-by-1,未初始化
Matrix3f a(3,3);//固定长度也可以这么写,3-by-3,float,未初始化
- 初始化类型
初始化的矩阵类型如下:
Matrix3f m;//3-by-3,float
m << 1, 2, 3,
4, 5, 6,
7, 8, 9;//不换行也行,只是为了看着方便,因为是行优先
使用已知的来定义未知的矩阵:
RowVectorXd vec1(3);//1-by-3, double,行向量
vec1 << 1, 2, 3;
RowVectorXd vec2(4);
vec2 << 1, 4, 9, 16;
RowVectorXd joined(7);
joined << vec1, vec2;//
类似的:
MatrixXf matA(2, 2);
matA << 1, 2, 3, 4;
MatrixXf matB(4, 4);
matB << matA, matA/10, matA/10, matA;
/*matB输出:
1 2 0.1 0.2
3 4 0.3 0.4
0.1 0.2 1 2
0.3 0.4 3 4*/
还可以这样:
Matrix3f m;
m.row(0) << 1, 2, 3;//第0行
m.block(1,0,2,2) << 4, 5, 7, 8;//输入一个块从(1,0)开始取(2,2)大小的块,后续会讲到。
m.col(2).tail(2) << 6, 9; //第二列从结尾开始
/*m输出
1 2 3
4 5 6
7 8 9*/
4位以内的向量还可以用下列方式进行定义并初始化:
Vector2d a(5.0, 6.0);//2-by-1,内容为5.0和6.0;
Vector3d b(5.0, 6.0, 7.0);
Vector4d c(5.0, 6.0, 7.0, 8.0);
2.4访问矩阵元素
矩阵元素访问用(i,j)的形式,下标从0开始。
#include <iostream>
#include <Eigen/Dense>
using namespace Eigen;
int main()
{
MatrixXd m(2,2);
m(0,0) = 3;
m(1,0) = 2.5;
m(0,1) = -1;
m(1,1) = m(1,0) + m(0,1);
std::cout << "Here is the matrix m:\n" << m << std::endl;
VectorXd v(2);
v(0) = 4;
v(1) = v(0) - 1;
std::cout << "Here is the vector v:\n" << v << std::endl;
}
输出:
Here is the matrix m:
3 -1
2.5 1.5
Here is the vector v:
4
3
2.5 重置矩阵大小
- resize()
可以通过rows(),cols()和size()设置矩阵的大小,同时也可以用resize()来重置矩阵大小,而且resize的大小发生改变的话会删除原来的值,相当于重新定义了一个矩阵。如果resize()的大小没有改变,则元素依旧保存。
#include <iostream>
#include <Eigen/Dense>
using namespace Eigen;
using namespace std;
int main()
{
MatrixXd m(2,5);
m<<1,2,3,4,5,6,7,8,9,10;
cout<<m<<endl;
m.resize(2,5);//因为size大小不变,元素保留,换成(5,2)也会保留元素
cout<<m<<endl;
m.resize(4,3);//重置大小,且内容为0
cout<<m.rows()<<endl//4行
<<m.cols()<<endl//3列
<<m.size()<<endl//大小12
<<m<<endl;//清空原来的元素,m为0
}
- "="重置大小
对于动态矩阵可以通过赋值操作改变大小,但是固定矩阵则会报错。
#include <iostream>
#include <Eigen/Dense>
using namespace Eigen;
using namespace std;
int main()
{
MatrixXd a(3,3);
MatrixXd b(2,2);
b<<1,2,3,4;
a = b;//a的大小也是(2,2)
cout<<a<<endl;
}
2.6 怎么选择固定矩阵和动态矩阵
Eigen推荐:当矩阵小于16的时候使用固定矩阵。使用静态矩阵对性能有极大的好处。动态矩阵是在堆上操作的。比如下列操作:
MatrixXf mymatrix(rows,columns);
类似于定义了这样一个数组:
float *mymatrix = new float[rows*columns];
三. 矩阵的运算
矩阵重载了C++中的运算符,例如"+", “-”, “+=”。
3.1 加法和减法
- 二元操作符+/-表示两矩阵相加:a+b
- 一元操作符-表示对矩阵取负:-a
- 组合操作法+=或者-=:a+=b
#include <iostream>
#include <Eigen/Dense>
using namespace Eigen;
int main()
{
Matrix2d a;
a << 1, 2,
3, 4;
MatrixXd b(2,2);
b << 2, 3,
1, 4;
std::cout << "a + b =\n" << a + b << std::endl;
std::cout << "a - b =\n" << a - b << std::endl;
std::cout << "Doing a += b;" << std::endl;
a += b;
std::cout << "Now a =\n" << a << std::endl;
Vector3d v(1,2,3);
Vector3d w(1,0,0);
std::cout << "-v + w - v =\n" << -v + w - v << std::endl;
}
输出结果:
a + b =
3 5
4 8
a - b =
-1 -1
2 0
Doing a += b;
Now a =
3 5
4 8
-v + w - v =
-1
-4
-6
3.2 标量的乘除法
标量乘除法表示矩阵中的每个元素都对标量进行相应的运算。
#include <iostream>
#include <Eigen/Dense>
using namespace Eigen;
int main()
{
Matrix2d a;
a << 1, 2,
3, 4;
Vector3d v(1,2,3);
std::cout << "a * 2.5 =\n" << a * 2.5 << std::endl;
std::cout << "0.1 * v =\n" << 0.1 * v << std::endl;
std::cout << "Doing v *= 2;" << std::endl;
v *= 2;
std::cout << "Now v =\n" << v << std::endl;
}
输出结果:
a * 2.5 =
2.5 5
7.5 10
0.1 * v =
0.1
0.2
0.3
Doing v *= 2;
Now v =
2
4
6
3.3 转置矩阵、共轭矩阵、伴随矩阵
在数学中转置矩阵、共轭矩阵、伴随矩阵分别表示为, a T a^T aT, a ˉ \bar{a} aˉ, a ∗ a^* a∗。在Eigen中他们分别用transpose(),conjugate(),adjoint()表示。转置矩阵很好理解,我们再复习一下共轭矩阵和伴随矩阵。
- 共轭矩阵(conjugate matrix)
当
A
=
(
a
i
j
)
A=(a_{ij})
A=(aij)为复数矩阵时,用表示
a
ˉ
\bar{a}
aˉ表示
a
a
a的共轭复数,则
A
ˉ
\bar{A}
Aˉ为A的共轭矩阵。另外自共轭矩阵又称为埃米尔特(Hermite)矩阵,记为
A
=
A
H
A=A^H
A=AH,例如下面就是一个自共轭矩阵。
- 伴随矩阵(Adjoint matrix)
由代数余子式组成的矩阵。如下:
代数余子式: A i j = ( − 1 ) i + j M i j A_{ij}=(-1)^{i+j}M_{ij} Aij=(−1)i+jMij。也就是划去i行j列之后,剩下元素组成的n-1阶行列式的值。其中 M i j M_{ij} Mij为余子式。
当为复矩阵时,用表示a的共轭复数,记,则为A的共轭矩阵。
#include <iostream>
#include <Eigen/Dense>
using namespace Eigen;
using namespace std;
int main()
{
//MatrixXcf a = MatrixXcf::Random(2,2);//随机产生2-by-2的复数矩阵
Matrix3d a;
a<< 1,2,3,4,5,6,7,8,9;
cout<<"矩阵a:"<<endl<<a<<endl;
cout<<"转置矩阵:"<<endl<<a.transpose()<<endl;
cout<<"共轭矩阵:"<<endl<<a.conjugate()<<endl;
cout<<"伴随矩阵:"<<endl<<a.adjoint()<<endl;
Matrix3d b;
b = a.transpose();
cout<<"矩阵a:"<<endl<<a<<endl;
cout<<"矩阵b:"<<endl<<a<<endl;
}
注意这里不能用自己的转置(或者其他操作)直接赋值给自己,例如下面的情况会报错:
a = a.transpose();//不允许
如果需要改变自己的状态,可以用transposeInPlace() ,adjointInPlace()来代替。
a.transposeInPlace();//直接进行转置,但是也不允许用“=”给自己赋值
3.4 矩阵之间的乘法
矩阵的相乘,矩阵与向量的相乘也是使用操作符*,共有 * 和*=两种操作符,其用法可以参考如下代码:
仅仅需要注意的是矩阵乘法和加减一样,可以使用类似于a = a* a的操作。
#include <iostream>
#include <Eigen/Dense>
using namespace Eigen;
int main()
{
Matrix2d mat;
mat << 1, 2,
3, 4;
Vector2d u(-1,1), v(2,0);
std::cout << "Here is mat*mat:\n" << mat*mat << std::endl;
std::cout << "Here is mat*u:\n" << mat*u << std::endl;
std::cout << "Here is u^T*mat:\n" << u.transpose()*mat << std::endl;
std::cout << "Here is u^T*v:\n" << u.transpose()*v << std::endl;
std::cout << "Here is u*v^T:\n" << u*v.transpose() << std::endl;
std::cout << "Let's multiply mat by itself" << std::endl;
mat = mat*mat;//这个操作是允许的
std::cout << "Now mat is mat:\n" << mat << std::endl;
}
输出:
Here is mat*mat:
7 10
15 22
Here is mat*u:
1
1
Here is u^T*mat:
2 2
Here is u^T*v:
-2
Here is u*v^T:
-2 -0
2 0
Let's multiply mat by itself
Now mat is mat:
7 10
15 22
3.5 矩阵的点乘与叉乘
点乘:相同位元素相乘,并进行相加操作得到一个标量。相当于a·b=(a^T)*b。同时也可以用a.adjoint()*b来表示。
叉乘:向量积,数学中又称外积、叉积。而且叉乘是有顺序的。
点乘与叉乘使用dot()和cross()操作完成。
#include <iostream>
#include <Eigen/Dense>
using namespace Eigen;
using namespace std;
int main()
{
Vector3d v(1,2,3);
Vector3d w(0,1,2);
cout << "Dot product: " << v.dot(w) << endl;
double dp = v.adjoint()*w; // automatic conversion of the inner product to a scalar
cout << "Dot product via a matrix product: " << dp << endl;
cout << "Cross product:\n" << v.cross(w) << endl;
}
输出:
Dot product: 8
Dot product via a matrix product: 8
Cross product:
1
-2
1
注意:Eigen中,叉乘仅对3维列向量才可以使用,点乘对任意大小向量均可使用。
3.6 基本算数运算
Eigen提供了一些基本的矩阵元素运算,例如求和、求乘积、求最大值、最小值等
#include <iostream>
#include <Eigen/Dense>
using namespace std;
int main()
{
Eigen::Matrix2d mat;
mat << 1, 2,
3, 4;
cout << "Here is mat.sum(): " << mat.sum() << endl;//求和
cout << "Here is mat.prod(): " << mat.prod() << endl;//求积
cout << "Here is mat.mean(): " << mat.mean() << endl;//求平均值
cout << "Here is mat.minCoeff(): " << mat.minCoeff() << endl;//求最小值
cout << "Here is mat.maxCoeff(): " << mat.maxCoeff() << endl;//求最大值
cout << "Here is mat.trace(): " << mat.trace() << endl;//迹,也就是对角线的和
}
输出:
Here is mat.sum(): 10
Here is mat.prod(): 24
Here is mat.mean(): 2.5
Here is mat.minCoeff(): 1
Here is mat.maxCoeff(): 4
Here is mat.trace(): 5
补充:
其中求迹除了用mat.trace()外,还可以使用 mat.diagonal().sum()。最大值和最小值还可以返回他们相应的坐标,例如:
#include <iostream>
#include <Eigen/Dense>
using namespace Eigen;
using namespace std;
int main()
{
Matrix3f m = Matrix3f::Random();
std::ptrdiff_t i, j;
float minOfM = m.minCoeff(&i,&j);
cout << "Here is the matrix m:\n" << m << endl;
cout << "Its minimum coefficient (" << minOfM
<< ") is at position (" << i << "," << j << ")\n\n";
RowVector4i v = RowVector4i::Random();
int maxOfV = v.maxCoeff(&i);
cout << "Here is the vector v: " << v << endl;
cout << "Its maximum coefficient (" << maxOfV
<< ") is at position " << i << endl;
}
输出:
Here is the matrix m:
0.680375 0.59688 -0.329554
-0.211234 0.823295 0.536459
0.566198 -0.604897 -0.444451
Its minimum coefficient (-0.604897) is at position (2,1)
Here is the vector v: 115899597 -48539462 276748203 -290373134
Its maximum coefficient (276748203) is at position 2
上文中ptrdiff_t是C/C++99标准库中定义的一个与机器相关的数据类型。ptrdiff_t类型变量通常用来保存两个指针减法(地址相减)操作的结果。ptrdiff_t定义在stddef.h(cstddef)这个文件内。ptrdiff_t通常被定义为long int类型。
四. 矩阵的块操作
块操作是以矩形的形式对矩阵或者数组进行操作。块操作可以作为左值也可以作为右值。
4.1 块操作的使用
块操作对静态、动态矩阵或者数组都可以使用。
块操作有两种使用方式,其中块的起始位置为(i,j)块大小为 (p,q)。也就是说从i开始取p个元素,从j开始取q个元素。
- matrix.block(i,j,p,q);
- matrix.block<p,q>(i,j);
- 右值举例:
#include <Eigen/Dense>
#include <iostream>
using namespace std;
int main()
{
Eigen::MatrixXf m(4,4);
m << 1, 2, 3, 4,
5, 6, 7, 8,
9,10,11,12,
13,14,15,16;
cout << "Block in the middle" << endl;
cout << m.block<2,2>(1,1) << endl << endl;
for (int i = 1; i <= 3; ++i)
{
cout << "Block of size " << i << "x" << i << endl;
cout << m.block(0,0,i,i) << endl << endl;
}
}
输出结果:
Block in the middle
6 7
10 11
Block of size 1x1
1
Block of size 2x2
1 2
5 6
Block of size 3x3
1 2 3
5 6 7
9 10 11
- 左值举例
#include <Eigen/Dense>
#include <iostream>
using namespace std;
using namespace Eigen;
int main()
{
Array22f m;
m << 1,2,
3,4;
Array44f a = Array44f::Constant(0.6);//4×4数组的每一项都赋0.6
cout << "Here is the array a:" << endl << a << endl << endl;
a.block<2,2>(1,1) = m;//把m赋值给a指定的块
cout << "Here is now a with m copied into its central 2x2 block:" << endl << a << endl << endl;
a.block(0,0,2,3) = a.block(2,1,2,3);//a指定的块赋给相应的块
cout << "Here is now a with bottom-right 2x3 block copied into top-left 2x3 block:" << endl << a << endl << endl;
}
输出结果:
Here is the array a:
0.6 0.6 0.6 0.6
0.6 0.6 0.6 0.6
0.6 0.6 0.6 0.6
0.6 0.6 0.6 0.6
Here is now a with m copied into its central 2x2 block:
0.6 0.6 0.6 0.6
0.6 1 2 0.6
0.6 3 4 0.6
0.6 0.6 0.6 0.6
Here is now a with bottom-right 2x3 block copied into top-left 2x3 block:
3 4 0.6 0.6
0.6 0.6 0.6 0.6
0.6 3 4 0.6
0.6 0.6 0.6 0.6
4.2块的行操作和列操作
- 行操作:第i行,matrix.row(i)
- 列操作:第j列,matrix.col(j)
行、列操作均是从0开始的
#include <Eigen/Dense>
#include <iostream>
using namespace std;
int main()
{
Eigen::MatrixXf m(3,3);
m << 1,2,3,
4,5,6,
7,8,9;
cout << "Here is the matrix m:" << endl << m << endl;
cout << "2nd Row: " << m.row(1) << endl;
m.col(2) += 3 * m.col(0);//第0列的3倍,加到第2列上
cout << "After adding 3 times the first column into the third column, the matrix m is:\n";
cout << m << endl;
}
输出结果:
Here is the matrix m:
1 2 3
4 5 6
7 8 9
2nd Row: 4 5 6
After adding 3 times the first column into the third column, the matrix m is:
1 2 6
4 5 18
7 8 30
4.3 矩阵的角操作
Eigen可以对一些特殊的角块进行操作,比如左上角,右上角等等,角操作汇总如下:

代码举例:
#include <Eigen/Dense>
#include <iostream>
using namespace std;
int main()
{
Eigen::Matrix4f m;
m << 1, 2, 3, 4,
5, 6, 7, 8,
9, 10,11,12,
13,14,15,16;
cout << "m.leftCols(2) =" << endl << m.leftCols(2) << endl << endl;//左边两列
cout << "m.bottomRows<2>() =" << endl << m.bottomRows<2>() << endl << endl;//底下两行
m.topLeftCorner(1,3) = m.bottomRightCorner(3,1).transpose();
//右下角的块大小为3行1列(8,12,16),转置到左上角去
cout << "After assignment, m = " << endl << m << endl;
}
输出结果:
m.leftCols(2) =
1 2
5 6
9 10
13 14
m.bottomRows<2>() =
9 10 11 12
13 14 15 16
After assignment, m =
8 12 16 4
5 6 7 8
9 10 11 12
13 14 15 16
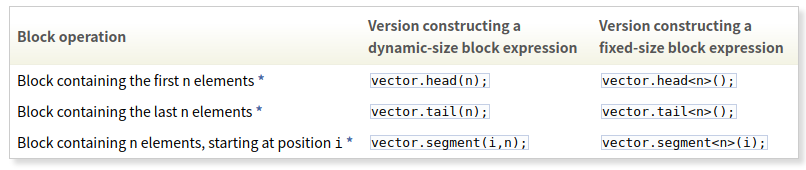
4.4 对向量进行块操作
Eigen也可以对一维向量或者一维数组进行操作
代码举例:
#include <Eigen/Dense>
#include <iostream>
using namespace std;
int main()
{
Eigen::ArrayXf v(6);//6个元素的数组
v << 1, 2, 3, 4, 5, 6;
cout << "v.head(3) =" << endl << v.head(3) << endl << endl;//头部的3个元素块
cout << "v.tail<3>() = " << endl << v.tail<3>() << endl << endl;//尾部的3个元素块
v.segment(1,4) *= 2;//从第1个开始的4个元素块,然后对它的子块进行乘以2倍的操作。
cout << "after 'v.segment(1,4) *= 2', v =" << endl << v << endl;
}
输出结果:
v.head(3) =
1
2
3
v.tail<3>() =
4
5
6
after 'v.segment(1,4) *= 2', v =
1
4
6
8
10
6
















 696
696











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











