






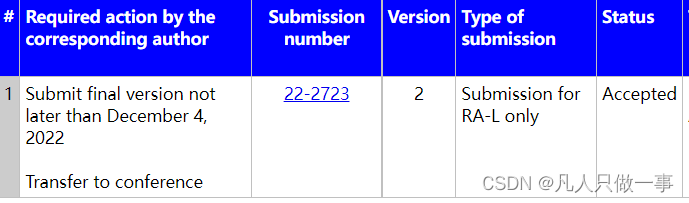
 作者分享了向IEEERoboticsandAutomationLetters(RAL)及ICRA投稿的经历,包括RAL的快速审稿过程,一般在两个月内给出最终决定,且限制在8页以内。论文经过大幅修改后被录用,并需支付超页费。对于ICRA的投稿,由于时间问题,只能选择转投会议,作者在1月18日收到了接收邮件,并需在3月5日前提交最终稿。
作者分享了向IEEERoboticsandAutomationLetters(RAL)及ICRA投稿的经历,包括RAL的快速审稿过程,一般在两个月内给出最终决定,且限制在8页以内。论文经过大幅修改后被录用,并需支付超页费。对于ICRA的投稿,由于时间问题,只能选择转投会议,作者在1月18日收到了接收邮件,并需在3月5日前提交最终稿。
一 总体感受
RAL不愧未短平快的论文,从接收论文、送审和复审都相当快,我的两个多月出最终接收结果,期刊官网规定6个月内出最终结果。作为现在IEEE主推的短文,限制在8页以内,在6页以上时超页费为175刀/页,目前看见的多数RAL论文都是8页。
二 RAL投稿时间线
时间均是国内时间
-
2022.9.15凌晨2点投稿,当天19:00状态变化 Under review
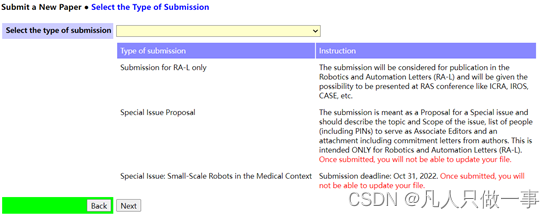
直接选择下面的Submission for RA-L only
-
惊奇的是2022.9.26状态变为Decision Pending,外审意见这就回来了?有被惊讶到

-
等了两周,都没有状态更新,发了一封催恢复的邮件;
催稿信:
Dear Prof. **,
This is with regard to our submitted manuscript, **, titled “**” submitted to IEEE Robotics and Automation Letters. Sorry for disturbing you, we are not sure if it is the right time to contact you to inquire about the status of our submitted manuscript, which the status of “Decision pending” has been lasting for more than two weeks since September 26, 2022. If there are some responses from the reviewers, would you please tell me the results so that we can deal with it as early as possible? Sorry again for disturbing you.
We deeply appreciate your consideration of our manuscript. We are looking forward for your response sincerely.
Best regards.
Yours sincerely
- 有幸收到邮件:进入了复审 10.13

按照专家意见进行了大幅修改,持续约10天 - 复审意见为录用 11.20
按照要求时间提交最终稿。
- 校稿
按照要求进行校稿。 - 缴纳超页费
- 见刊 2023.02
三 ICRA投稿时间线
收到接收的邮件后,在PaperPlaza平台上选择转投ICRA。可能由于当时投稿的时间已经很晚了(ICRA2023收稿截止时间为2022.9.15),所以没法选择同时投会议和期刊?
邮件:
By RAS policy you have the opportunity to present the paper at one
of the upcoming RAS conferences listed below. For details about these
conferences visit https://www.ieee-ras.org/conferences-workshops
In your author workspace you will find a link to transfer your paper
to the eligible conference(s) during appropriate submission windows
for various linked conferences. Please observe the time window listed
below for each conference. You are only sent a single invitation to
transfer papers to conference(s). As new conference become eligible or
older ones drop off from the list, you will NOT get additional
notifications. It is your responsibility to select the right conference
at the correct time. Once transferred, you will not be able to undo the
transfer, nor be able to transfer to another conference.
Please note that:
(1) Only the corresponding author may transfer the paper to a
conference
(2) By transferring the paper, you understand that you will comply with
the conference registration policy and any requirement to submit a
conference version of the paper
Details and further instructions may be found on the conference
website of your choice. The link to conferences actively accepting
transferred papers also appears in your workspace.
通过ICRA官网得到,在1月30日之前能够收到ICRA会议结果
1月18日收到接收邮件!!
3月5日上传ICRA最终稿
后期按照其官网要求注册会议、制作汇报视频和内容即可。要持续关注ICRA官网的dealine和要求,这段时间会议方的邮件回复都特别慢,有问题可以找前辈咨询更稳。
细节内容欢迎评论和私信。

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









