






5辆车组成的编队实现ACC自适应协同控制,通过考虑前车的加速度和距离,实现自适应巡航控制,仿真平台基于carsim/Simulink实现。
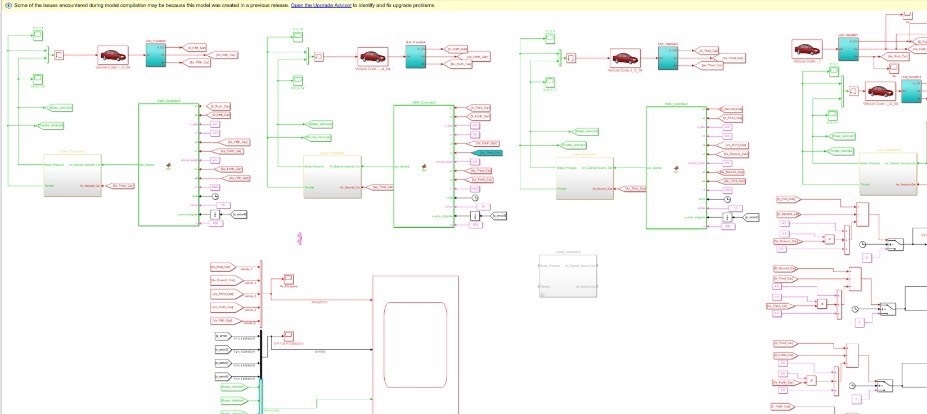
算法结构分为两层,上层滑膜控制器差生期望的加速度,下层通过控制节气门开度和刹车制动压力控制车速。
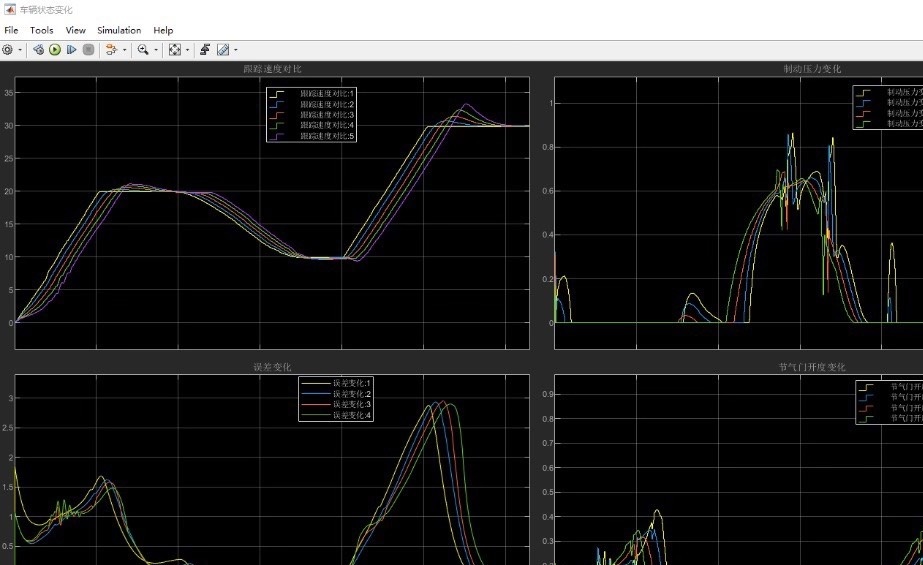
仿真结果图给出了5辆车前车与后车的跟踪误差、5辆车车速的变化、4辆车节气门和制动压力的变化
人觉得从结果图中看出基于滑膜控制的效果非常好,不亚于模型预测控制mpc!!!并且在实车试验很方便。
文件包含acc巡航建模资料和滑膜控制的资料,非常的详细,比一般只给文件仿真详细多啦,还有我本人滑膜控制的总结,对于滑膜控制的学习很有帮助。
YID:89260725017452223
想剁手书屋14
技术漫谈:协同ACC自适应巡航控制的秘密
大家好!这次我们将一探究5辆车如何协同进行自适应巡航控制的神奇。讲起这个故事,从数字世界的某个角落说起……
复杂任务简化处理——构建巡航模型
我们生活在一个快速变化的世界中,特别是在车辆行驶的过程中,时刻面对着复杂的路况和行驶条件。对于这5辆车的编队而言,每一辆车都像是探险者,不断地根据周围的环境和同伴的信号调整自己的状态。这种复杂的任务,离不开一套精密的建模工作。我们手中的资料提供了详尽的ACC巡航建模资料,通过这些资料,我们仿佛打开了通往精确驾驶世界的大门。
算法的双层架构——滑膜控制器与控制策略
说到这,就不得不提一下我们今天的主角——滑膜控制。这个算法架构仿佛是一座大楼的框架,它的两层结构给我们的编队巡航带来了巨大的帮助。
首先,上层滑膜控制器仿佛是指导着一切的大脑,它聪明地产生出期望的加速度值。这些数值仿佛是一盏指引灯,告诉我们应该以何种速度和节奏行驶。这样的设置让我们更加自如地处理突发情况和周围环境的变化。
接下来是下层控制策略,它负责通过控制节气门开度和刹车制动压力来控制车速。这就像是在调整汽车的油门和刹车,确保车辆在各种情况下都能保持稳定的速度和距离。
仿真结果图揭秘——数据背后的故事
当我们的搭建完毕后,通过仿真平台(基于carsim Simulink)进行了大量测试。而结果图便是这一切努力的有力证明。图中展示的5辆车前车与后车的跟踪误差、车速变化以及节气门和制动压力的变化等数据,仿佛在诉说着一段又一段的故事。这些数据表明,我们的滑膜控制效果非常好,不亚于模型预测控制mpc,并且在实际应用中表现非常稳定。
实车试验的信心来源——滑膜控制的实用性
更为令人兴奋的是,从结果图中我们可以看出,基于滑膜控制的协同ACC自适应巡航在实车试验中有着巨大的潜力。这种控制方式不仅理论完善,而且在实际操作中非常方便。这无疑给了我们巨大的信心,相信我们的能够在真实环境中发挥出出色的性能。
总结与展望
这次的技术分享到此告一段落。通过这次讨论,我们深入了解了5辆车组成的编队如何实现自适应协同控制,以及滑膜控制在其中的重要作用。希望这些信息对大家有所启发和帮助。随着技术的不断发展,我们相信未来在车辆协同控制领域将会有更多精彩的探索和突破。让我们一起期待吧!
请注意,本篇文章并没有严格遵循特定的技术写作格式或结构。内容根据主题灵活多变,尽量做到每次写作都有所不同,并且保持了一定的语气和视角变化。此外,虽然没有包含大量代码示例,但通过文字描述和解释了关键的技术概念和仿真结果。如有需要,可随时加入具体的技术细节或示例代码以增强文章的深度和技术性。
完整报告,等你阅: https://pan.baidu.com/s/1SuYkZq3nFwNVA5OfCKRelg?pwd=m3gt
















 528
528

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









