










 本文介绍了六自由度平台在舰船等设备运动模拟中的应用,以及XTDIC-STROBE系统如何通过3D-DIC和双目视觉技术实现三维动态测量,提供高精度的六自由度数据。文章重点阐述了在海洋科研中的具体实验,如船模运动控制性能分析,以及新拓三维系统的标定和数据采集过程,展示了其在提升设备稳定性方面的实际价值。
本文介绍了六自由度平台在舰船等设备运动模拟中的应用,以及XTDIC-STROBE系统如何通过3D-DIC和双目视觉技术实现三维动态测量,提供高精度的六自由度数据。文章重点阐述了在海洋科研中的具体实验,如船模运动控制性能分析,以及新拓三维系统的标定和数据采集过程,展示了其在提升设备稳定性方面的实际价值。
六自由度平台可实现空间六自由度运动模拟,六自由度平台运动模拟系统是对舰船、飞机、宇航和车载设备等不同状态时的行动进行模拟,是对这些运行状态可靠性进行研究的重要模拟试验装置。

▲六自由度运动仿真实验平台
六自由度三维空间姿态测量,传统的接触式位姿测量方法具有事先确定计算点的数量和位置的局限性。三维数字图像相关法(3D-DIC),可获得被测物不同时刻的全场坐标信息,根据提取的相应计算点坐标,结合空间向量求解空间目标的位姿参数,记录实验体在该三维空间中的“位置、运动轨迹、速度、角度、加速度、角加速度”等运动轨迹指标。

▲XTDIC-STROBE系列动态轨迹测量
实验背景
在海洋科研中,很多科研实验都需要测量数据支撑,例如模拟海上颠簸状态,研究相应设备等实验体的运动学指标和稳定性等。
新拓三维XTDIC-STROBE三维动态测量系统结合数字图像相关技术(DIC)与双目立体视觉技术,采用三台高速工业相机追踪物体表面的散斑图像,实现运动变形过程中物体表面的图像关键标记的动态测量,可获得在三维空间中的真实六自由度数据。
获取这些数据有何实际意义?
以海洋船模研究为例,在六自由度测量建立的三维空间中,通过对实验船模的运动学指标进行数据分析,找出船模运动控制性能缺点并进行改造,逐渐提升航行过程中的稳定性、平滑性等性能,为实际航海科研提供数据参考,解决相关领域中的运动学控制技术难题。
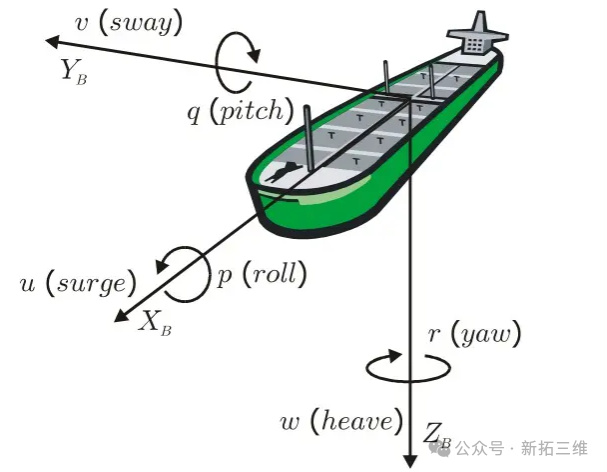
▲船舶六自由度图示
实验内容
实验目的:采用六自由度运动平台,模拟还原海上颠簸状态,研究航海设备稳定性。
实验设备:六自由度仿真实验平台,模拟海浪颠簸状态;针对不同幅面的测量范围,XTDIC-STROBE三维动态测量系统可以快速、方便地进行相机内外参标定。DIC系统集成了轨迹测量分析模块,通过检测靶标点空间位置数据,得到被测物位置及角度等数据信息。

试验过程
对新拓三维XTDIC-STROBE三维动态测量系统工业相机内、外参数标定校正,通过调整相机的视野范围及相机与实验试样之间的距离,使两台相机的视野范围基本上一致,调整镜头的焦点,使相机成像尽量清晰,根据拍摄视野和景深,同时保证两台相机能够识别充足有效的标记点。
将校正板放在试样摆放位置进行拍摄,用XTDIC软件对标定图像进行校准计算,DIC软件将显示每一张标定图像的评估分,DIC系统校正得分不大于0.05的要求即可完成标定。

采用新拓三维XTDIC-STROBE三维动态测量系统对实验体进行六自由度测量时,需要在该实验体的测量区域贴上特制的编码点,通过追踪实验试件上的编码点,DIC软件计算出实验体在该空间中的运动学六自由度参数。

图像采集分为静态拍摄阶段和动态拍摄阶段。六自由度仿真实验平台运作之前,被测物处于静止状态,手动触发DIC搭配的高速相机同步采集一组图像,并将所得结果作为参考图像,以给出每个图像子区中心在变形前的位移原点。
实验开始时,新拓三维XTDIC-STROBE三维动态测量系统工业相机分别采集图像,并将图像传输到计算机内,利用DIC软件进行计算,可以得到六自由度实验过程中被测件的位移、运动轨迹、速度、加速度、运动角度等测试数据结果。

数据分析
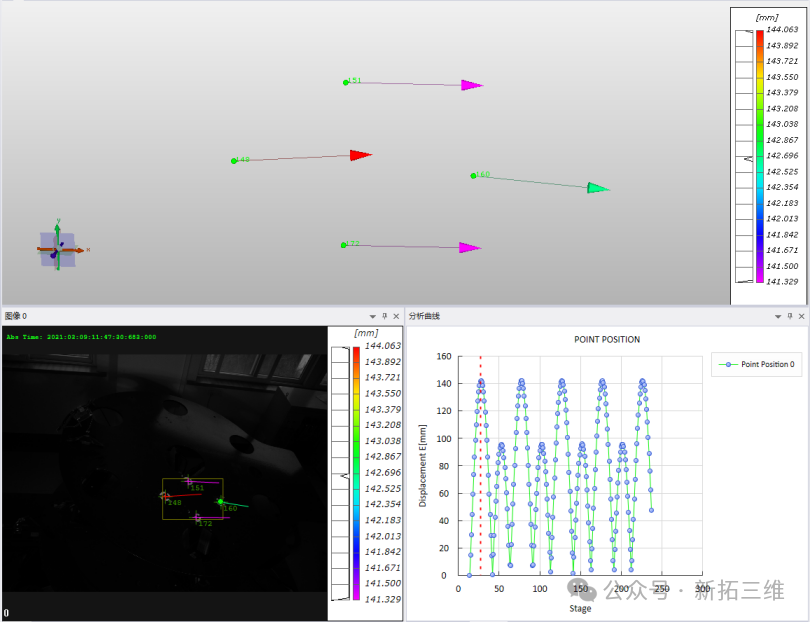
利用DIC软件对两台相机采集到的图像进行分析处理,并采用数字图像相关算法进行计算,得到被测物表面关键点位移数据。
利用DIC软件在被测物表面的设置4个单点(P1、P2、P3、P4),并得到这4个单点在六个自由度沿Y轴方向的位移曲线。
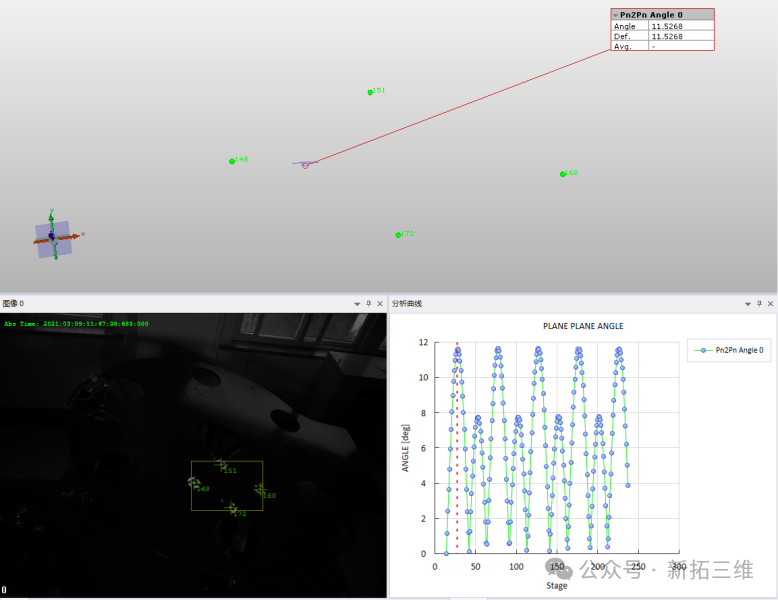
XTDIC系统基于数字图像相关法(DIC)和三维运动轨迹测量分析模块,适用于分析平移和旋转运动(6DoF,6自由度)的位移轨迹测量。如下是基于全场形貌和基于点的运动角度测量分析,准确测量绕轴旋转物体的位移转角。
通过六自由度实验平台六根伺服电动缸的伸缩运动,控制上平台在空间六个自由度(X、Y、Z、α、β、γ)运动,从而模拟出各种空间运动姿态,用于对各种科研实验进行运动学指标的采集分析。
对被测物运动姿态六自由度进行测量,采用传统的惯性传感器获取数据,往往无法将测量精度控制在理想范围内。
新拓三维XTDIC-STROBE三维动态测量系统通过获取被测物不同时刻的三维空间坐标信息,可在较小的误差范围内实现对空间目标多个位姿参数的测量,为实际科研六自由度运动学指标测试提供数据参考。

















 684
684

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









