






简介:RT-DETR是第一个实时端到端目标检测器,RT-DETR2 是基于 Transformer 的端到端检测器的 实时目标检测模型 (Real-Time Detection Transformer) ,目标是进一步提升目标检测的性能和效率,尤其是在实时目标检测场景下,相较于原始版本进行了性能和架构优化,其设计理念是以 高效性 和 实时性 为核心,结合 Transformer 模型的全局特征提取能力,为目标检测任务提供了兼具高性能和高速度的解决方案。
本教程配置:Windows10,CUDA11.8,python 3.8
1.代码拉取
git clone https://github.com/lyuwenyu/RT-DETR.git2.虚拟环境
conda create -n rtv2 python=3.8 -y
conda activate rtv2 3.安装依赖
cd rtdetrv2_pytorch
pip install six
pip install opencv-python
pip install torch==2.1.0+cu118 torchvision==0.16.0+cu118 torchaudio==2.1.0+cu118 -f https://download.pytorch.org/whl/cu118/torch_stable.html
pip install -r requirements.txt
pip install scipy
检查CUDA是否可用的命令(可不执行)
import torch
print("Is CUDA available:", torch.cuda.is_available()) # 应返回 True
print("CUDA version:", torch.version.cuda) # 查看 CUDA 版本
print("Device count:", torch.cuda.device_count()) # 查看可用 GPU 数量
4.制作数据集
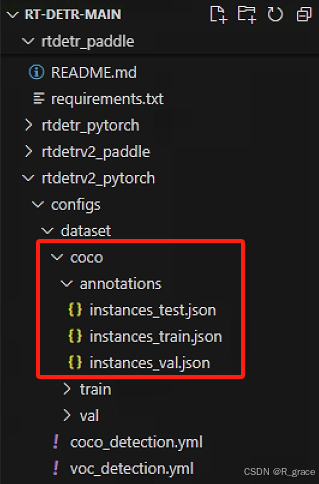
1)coco数据集格式
位置:rtdetrv2_pytorch > configs > dataset
修改:yolo的label(txt)转coco的annotations(json)代码为yoyo2coco.py【网上随便都能搜到】
2)配置yaml
位置:rtdetrv2_pytorch > configs > dataset > coco_detection.yml
修改:(1)num_classes;(2)train_dataloader的img_folder和ann_file;(3)val_dataloader的img_folder和ann_file;
img_folder: ./configs/dataset/coco/train/
ann_file: ./configs/dataset/coco/annotations/instances_train.json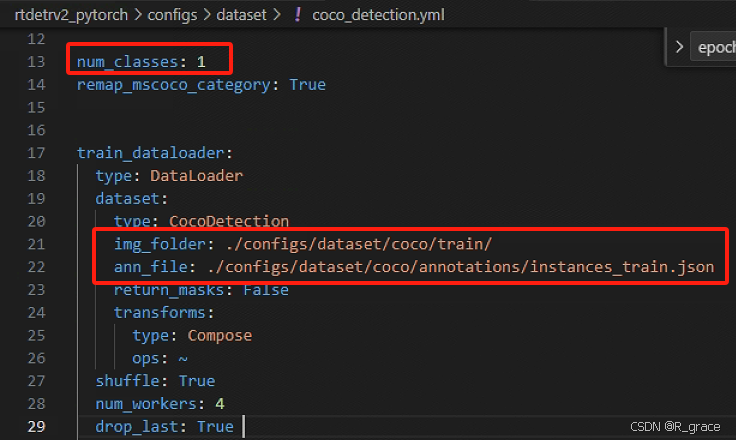
5.训练
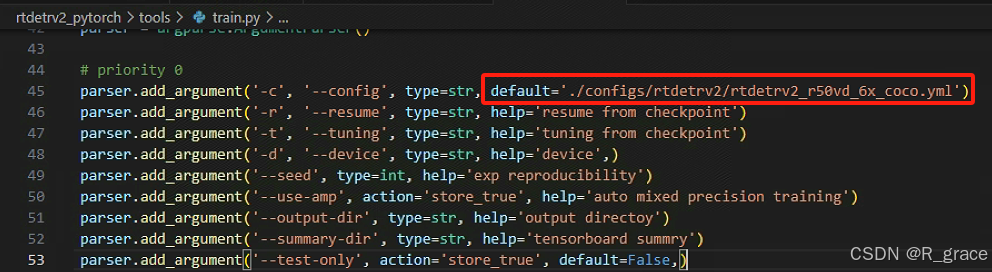
1)修改train.py
位置:rtdetrv2_pytorch > tools > train.py
修改:第45行添加:default='./configs/rtdetrv2/rtdetrv2_r50vd_6x_coco.yml'
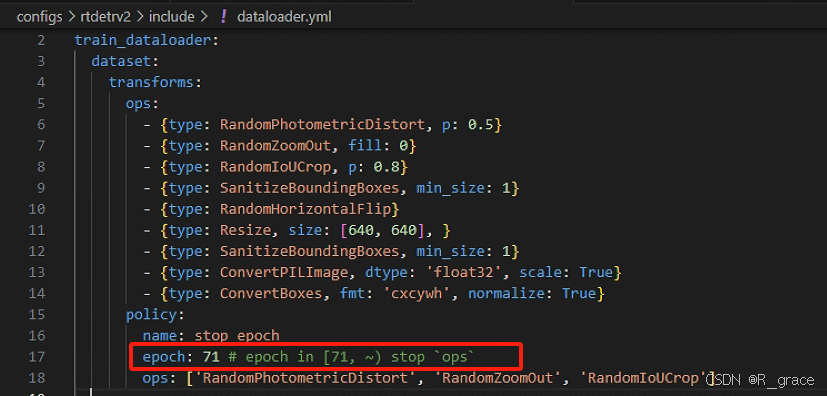
2)修改训练参数
位置:rtdetrv2_pytorch > configs > rtdetrv2 > include > dataloader.yml
修改:epoch
3)训练运行
位置:RT-DETR-main > rtdetrv2_pytorch > python tools/train.py
python tools/train.py

















 4万+
4万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









