







近段时间在学习PCL库,在点云上色的问题中进行了一个小总结。分别实现了一下几个功能:
1. 显示点云自带的颜色信息;
2. 根据点云的某个属性进行上色(例如:X,Y,Z等方向上不同颜色);
3. 自定义单一颜色(给某个点云显示同一个颜色);
4. 随机上色(由编译器随机给点云分配单一颜色);
5. 显示点云的法线方向和法向量;
下文会分别介绍上述功能的实现,并提供代码示例:
1、显示点云自带的颜色信息(PointCloudColorHandlerRGBField)
boost::shared_ptr<pcl::visualization::PCLVisualizer> colorHandler(pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud)
{
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer("3D Cloud"));
pcl::visualization::PointCloudColorHandlerRGBField<pcl::PointXYZRGB> rgb(cloud);
viewer->addPointCloud(cloud, rgb, "sample cloud");
return viewer;
}
这里用到了一个类 “PointCloudColorHandlerRGBField” 实际上用这种方法显示点云的自带颜色信息,感觉有点多此一举。可以直接 “viewer->addPointCloud(cloud, “sample cloud”);” 就能实现上述功能。为什么会有这个功能,大家可以尝试用这种方法能否将两个点数相同的不同类型点云,将其中一个点云的颜色赋到另一个点云上进行显示?
2. 根据点云的某个属性进行上色(PointCloudColorHandlerGenericField);
boost::shared_ptr<pcl::visualization::PCLVisualizer> genericHandler(pcl::PointCloud<pcl::PointXYZ>::Ptr cloud)
{
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer("3D Cloud"));
pcl::visualization::PointCloudColorHandlerGenericField<pcl::PointXYZ> rgb(cloud, "y");
viewer->addPointCloud(cloud, rgb, "sample cloud");
return viewer;
}
相信很容易能找到题为“为点云沿着x方向赋予不同颜色”的解决办法,就是利用类“PointCloudColorHandlerGenericField” ,上述代码展示了沿 “y” 方向的渐变上色。那这种方法是否只适用于XYZ方向?其他属性例如曲率,法线等特征是否也可以实现?结果是肯定的,解释如下:
首先我先找到了参数“y”传到了什么地方,通过定位到内部函数如下:
// Get the index we need
for (size_t d = 0; d < cloud.fields.size (); ++d)
if (cloud.fields[d].name == field_name)
return (static_cast<int>(d));
return (-1);
其中 field_name 就是 “y” 传入的地方,代码实现的功能明显就是从 “cloud.fields” 这个数组中,找到名为 “y” 的编号。那也就是说找到 cloud.fields 就能知道到底还可以传入什么参数?
为了说明这个问题再看一段代码:
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/point_cloud.h>
#include <pcl/PCLPointCloud2.h>
int main() {
pcl::PCLPointCloud2 cloud;
pcl::PCDReader reader;
reader.readHeader("C:\\Users\\13427\\Desktop\\test.pcd", cloud);
for (int i = 0; i < cloud.fields.size(); i++)
{
std::cout << cloud.fields[i].name << std::endl;
}
return 0;
}
输出为:
x
y
z
normal_x
normal_y
normal_z
rgb
psz
再打开代码中使用到的PCD文件如下:
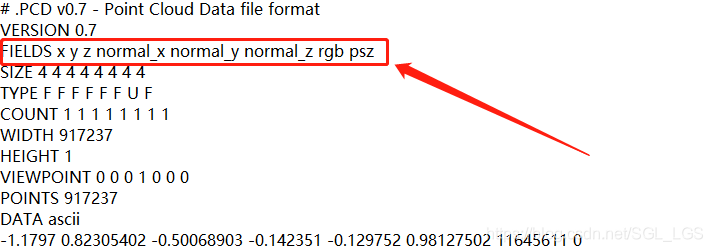
好的,看到这个图就瞬间明白了,就不多说了。所以按照属性赋值颜色的方法,其关键字可以是点云类型中的任何一个属性。所以,按照曲率,法线,反射强度等特征进行上色工作就能够实现了。
3. 自定义单一颜色(PointCloudColorHandlerCustom)
boost::shared_ptr<pcl::visualization::PCLVisualizer> customHandler(pcl::PointCloud<pcl::PointXYZ>::Ptr cloud)
{
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2199
2199

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









