







 本文记录了机器人运动控制系统的开发过程,包括电机驱动器的安装与接线,CML2.00开发包的研究,以及MFC界面的实现。详细描述了主履带与摆臂的控制面板设计,运动控制系统底层程序的完善,以及调试过程中遇到的问题和解决方案。
本文记录了机器人运动控制系统的开发过程,包括电机驱动器的安装与接线,CML2.00开发包的研究,以及MFC界面的实现。详细描述了主履带与摆臂的控制面板设计,运动控制系统底层程序的完善,以及调试过程中遇到的问题和解决方案。
工作记录流水账
1.机器人电机驱动器安装接线。
2.CML2.00开发包继续研究:电机驱动器底层API。
3.基于电机驱动CML-2.00程序编写(控制台)
实现功能:多驱动器串联同时控制 速度角度控制 连续运行
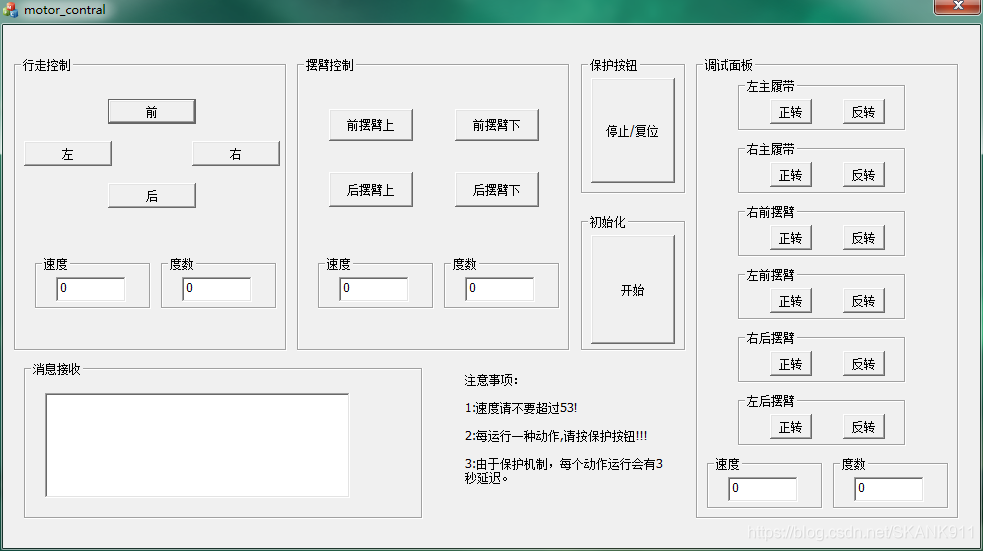
4.MFC界面
实现功能:多驱动器串联同时控制
速度角度控制
连续运行
第一版:运动控制系统
5 安装电机到机身
发现的问题:主履带卡 、电机电流过大,速度加不上去、电机实际速度跟不上指令速度,运行不连续
问题原因:调试使用的电源电压不够,有限流机械零件尺寸问题、缺少电流环速度环调节
解决方法:使用机器人自身电源(36V无限流)、机械零件重加工、速度环电流环调节
安装调试画面:主履带与摆臂

6机器人运动控制系统调试
运动控制系统底层MFC程序功能完善
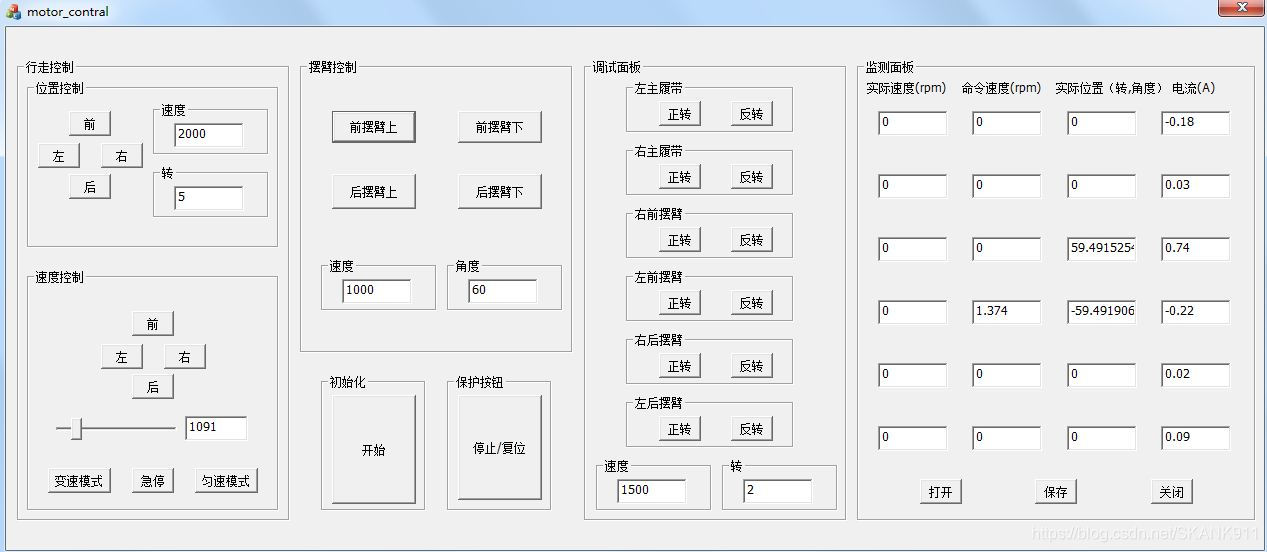
程序分为四个面板:控制面板、调试面板、初始化及复位保护面板、 监测面板。
其中控制面板分为:主履带控制面板与摆臂控制面板。
主履带控制面板分为两种控制模式:位置控制、速度控制。
监测面板可监测:实际速度、命令速度、电机实际位置、电机电流并可保存数据位TXT文件。
程序底层留有电机驱动器各种功能函数接口,为后期下位机的搭建做好充分准备。

















 5738
5738

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









