










elmo驱动器具有很强大的功能,之前只接触到ARM板控制,因需要使用PLC,通过一个月琳琳散散的攻克也只拿下部分,作为控制电机基本上满足实验室需要。关于emlo驱动器的相关电子档编程手册、硬件介绍和maxon电机的选型、功率等都已经上传到个人的资源中。
下面是三个链接是手册资源(部分是全英文的),以及电机调试的方法
elmo驱动器相关的手册-CSDN下载 https://download.csdn.net/download/qq_34935373/11295091
使用Beaglebone Black发送PWM控制ELMO实验 - 工大机器人工作室 - CSDN博客 https://blog.csdn.net/qq_34935373/article/details/86562250
MAXON RE40直流有刷电机在Elmo SimplIQ cello系列驱动器的增益调节 - 工大机器人工作室 - CSDN博客 https://blog.csdn.net/qq_34935373/article/details/86561909
上面的主要是基于ARM板beaglebone black作为控制器,下面介绍基于PLC对于电机的两种控制方式。
************************************************************我是分割线**********************************************************************
基于西门子PLC1200的PTO(PWM)电机控制
简单点区别,就是一般的pwm需要自己再单独设置一个集电极口作为方向,而PTO比pwm更强大,再加上西门子的轴工艺指令,可以实现你所想要的任何轴的操作。
需要软件博图,本人使用版本为博图V14。建立项目,选择控制器,个人根据自己的订货号,此处我选用S7-1200DC/DC/DC

点击plc_1,右击属性,启用脉冲发生器1,选用PTO(如果使用PWM比较简单,只需要在程序中加入脉冲发生器的函数,就可以实现,自己再配置一个方向输出口,控制方向。)这里默认的脉冲输出口是Q0.0,方向输出口为Q0.1

下面添加轴工艺的

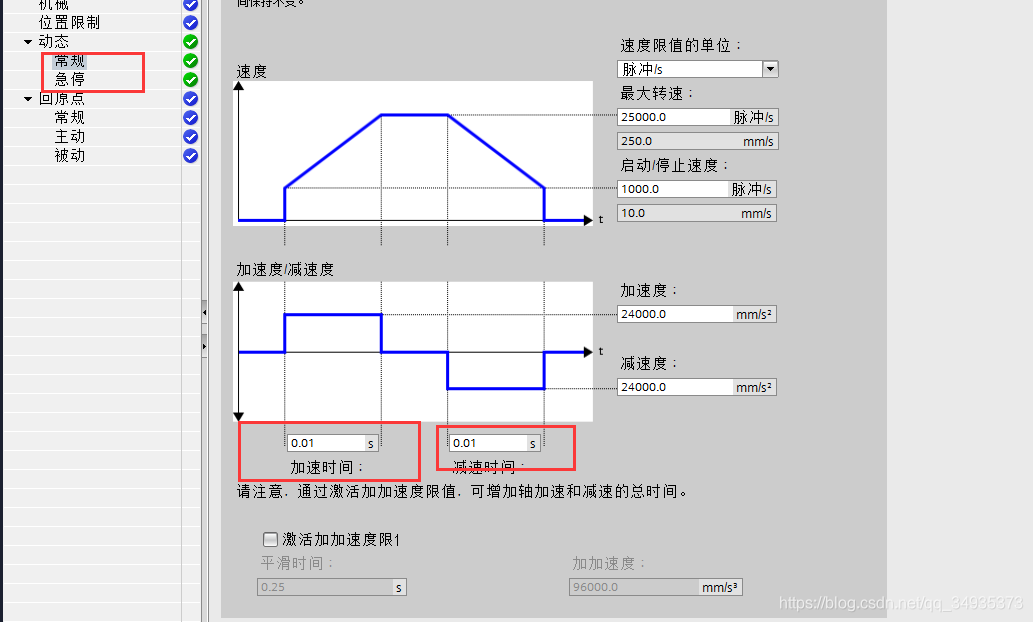
设置脉冲发生器

在常规和急停设置减速时间为0.01。其他的参数默认,本文的重点不是PLC,是驱动器ELMO的使用,所以如果需要HOMING和LIMIT的请参阅别的PLC书籍(推荐深入浅出西门子S7-1200)。或者PLC官网地址,下面的连接是PLC的视屏教学,运动控制部分与本文有重复部分(http://www.ad.siemens.com.cn/service/elearning/series/2.html)。
编写PLC程序(此处使用按照输入的速度参数进行运行,默认参数为10)
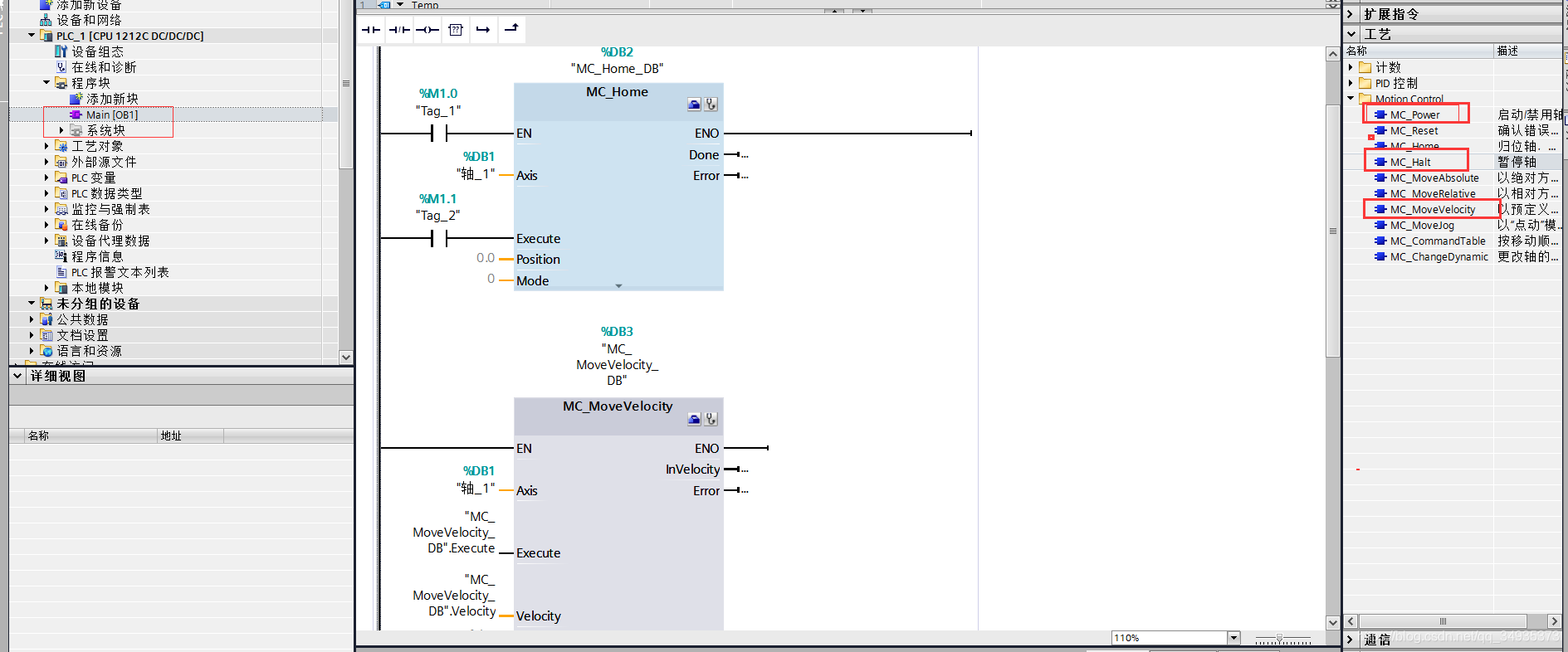
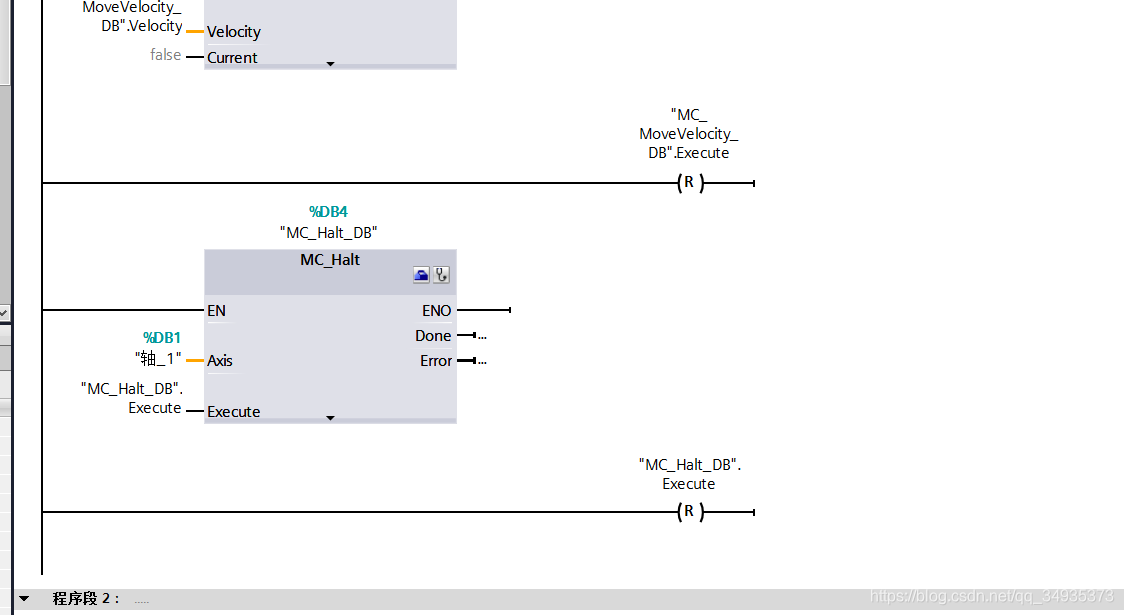
这里的两个置位操作是实现上升沿功能,M1.0和M1.1是开关的。
后面需要使用变量表来控制传值,实现PLC在线控制,这部分只是请自行学习。下面我要开始介绍,PLC、驱动器?电机的接线了。
二、硬件连线
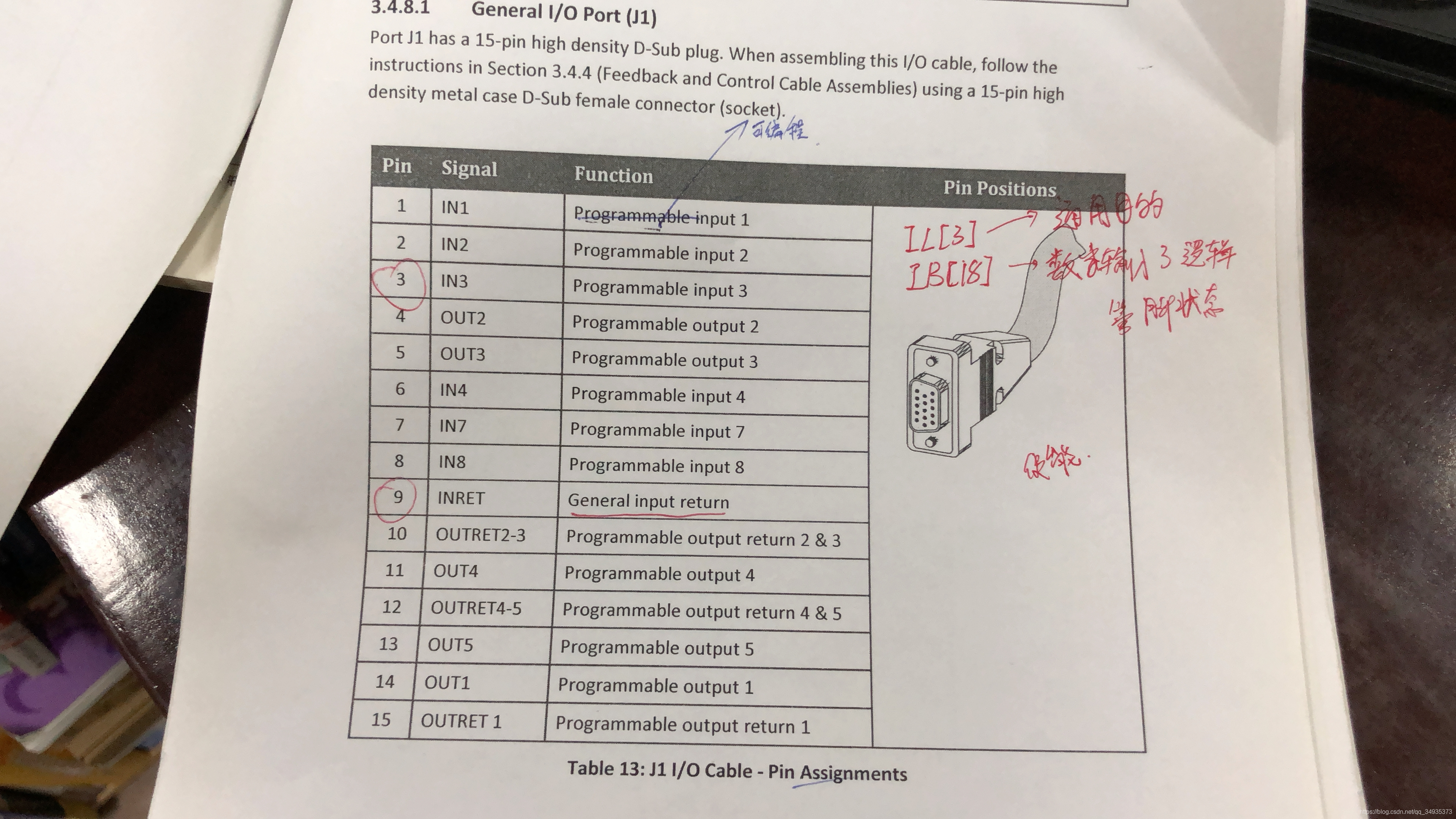
2.1 使能端口J1连线
引脚3接阻值大于10千欧的电阻后接入+24V,引脚9接地。其中引脚3和使能程序 IB[18] 是对应的。
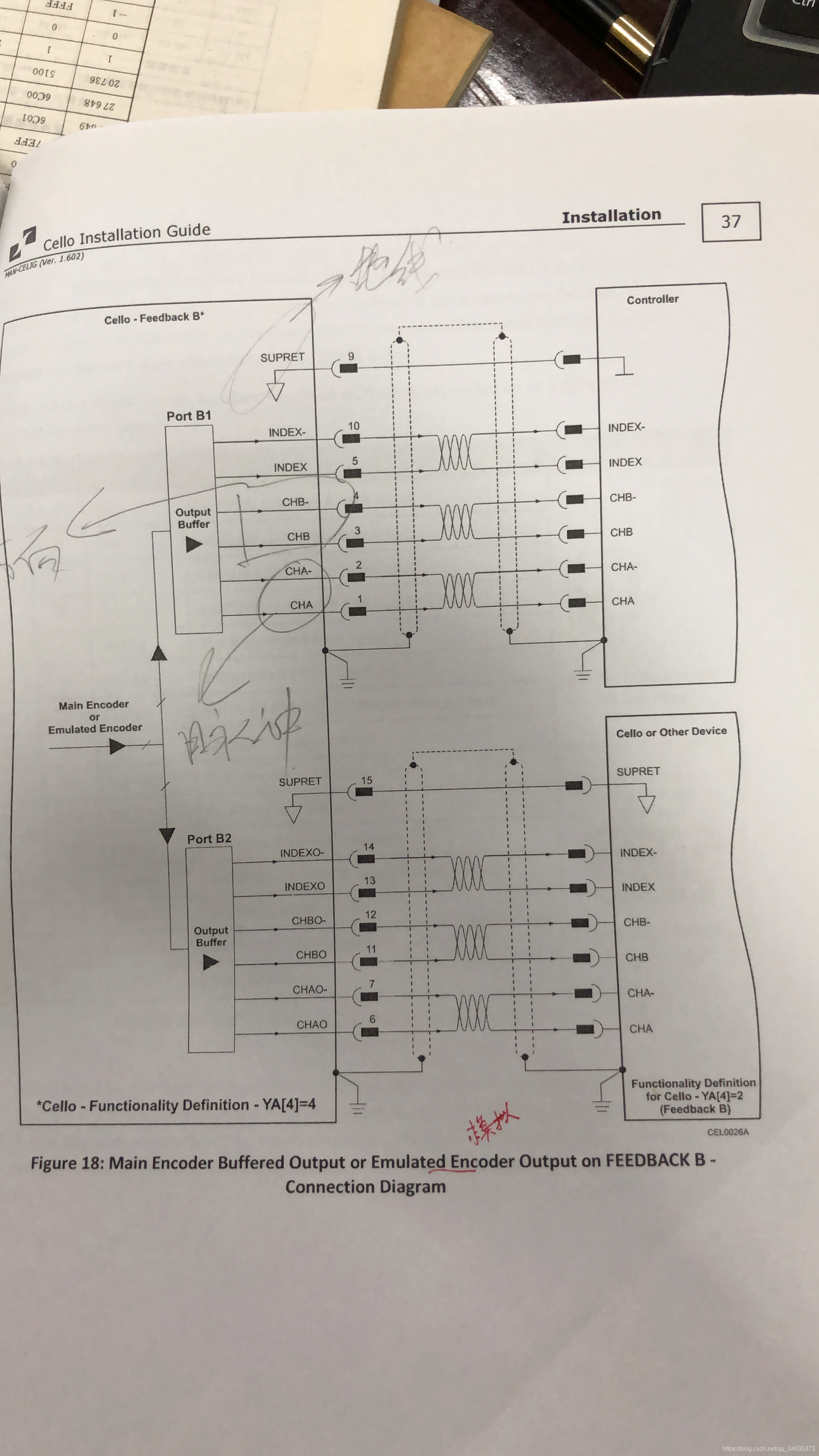
2.2 PWM输入端口Feedback B
按如图2所示接。
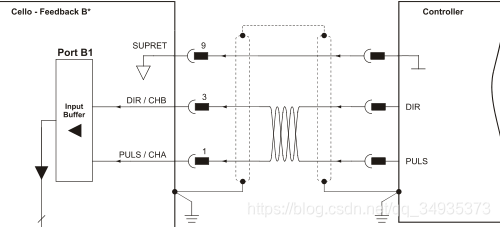
图2 PWM输入接发
由于有输入电压要求,所以需要电平转换,选用24V转5V的转换模块(ZKT-10XN4),如图3所示。其中输入端X1+接PLC的Q0.0脉冲,X2+接PLC的Q0.1方向,X1-和X2-短接后接地(24V负极);输出端的+U和-U分别接+5V和0V(为转换模块供电),Y1和Y2分别接ELMO驱动器的Feedback B口的引脚1和引脚3。Feedback B的引脚9接地(5V负极)。
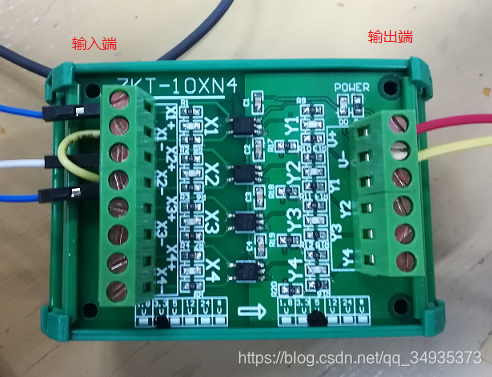
图3 电平转换模块
2.3 Feedback A端口与编码器接法
接线模块如图4所示。其中红色线对应着电机编码器1号引脚,依次往下,共10线,具体对应引脚含义请参考相应的编码器手册。接法如下:
电机编码器端 Feedback A端
1 不接线
2 4
3 3
4 不接线
5 5
6 6
7 14
8 15
9 7
10 8
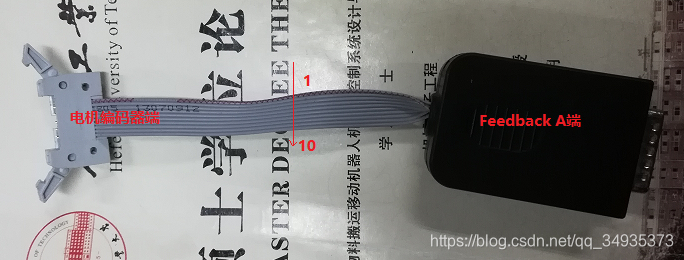
图4 编码器接线模块
2.4 其余模块接法
ELMO驱动器供电模块:VP+引脚接+24V、PR引脚接0V
电机与驱动器连接模块:M3引脚接电机+、M2引脚接电机-
模块如图5所示。
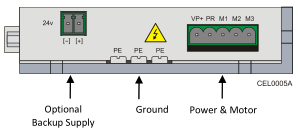
图5 电源与电机模块
具体调试部分不做讲解,使用PLC监控表实现启动和脉冲发生器的使能,通过传递数值可以改变速度数值大小,不过速度数值每次更新,需要重新使用上升沿重新激活速度控制指令。同时注意速度值为real型,整形需要转换才行,不然电机不转动。
*************************************************************可爱的我再次出现***************************************************************
基于西门子PLC1200的模拟量电机控制
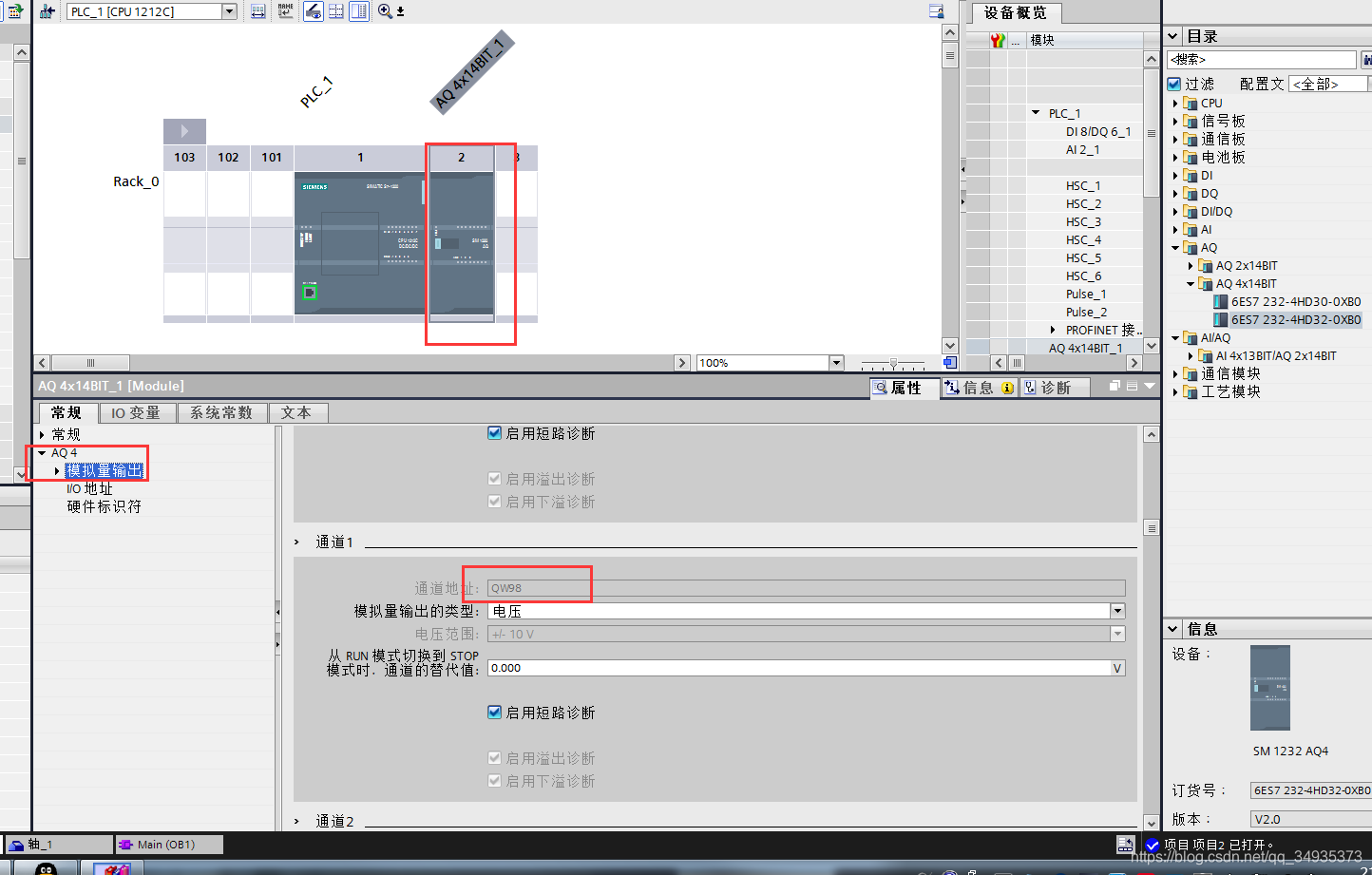
PLC模拟输出需要自己再增加额外的模拟量输出模块,这里拖拽选种的型拖至2号槽口,完成!
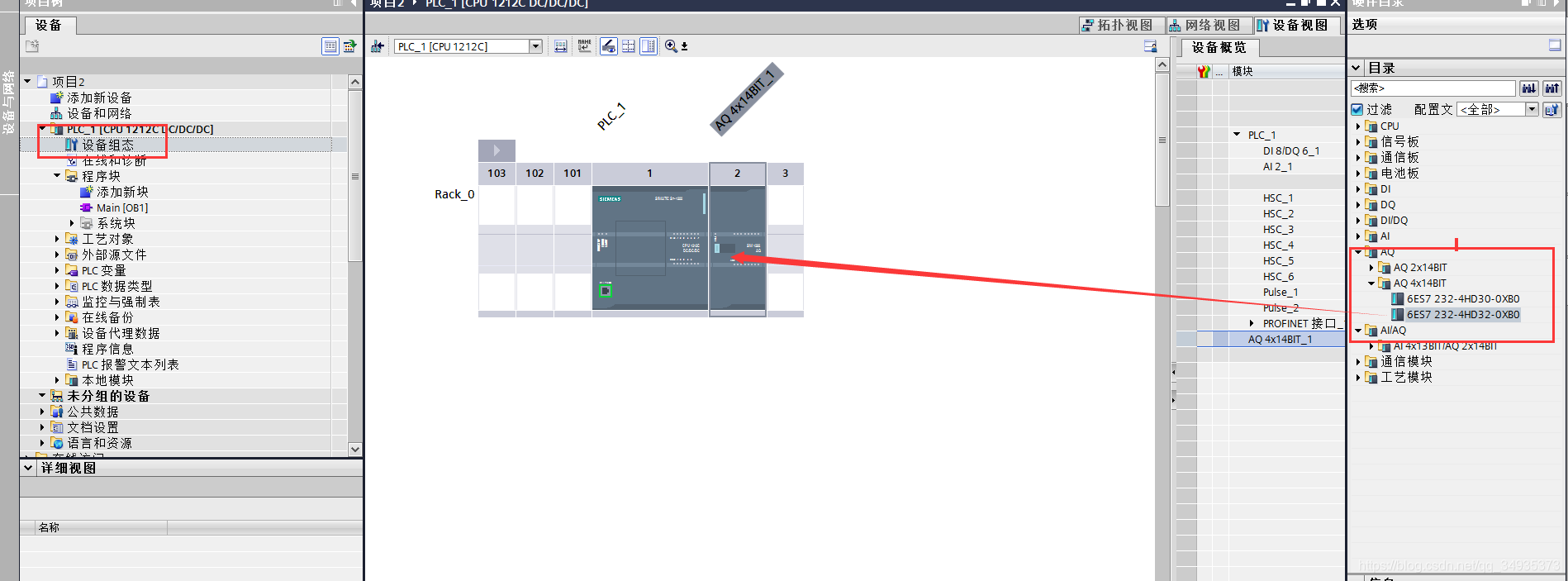
选中2号槽的模块,右击属性,查看模拟量的通道地址。
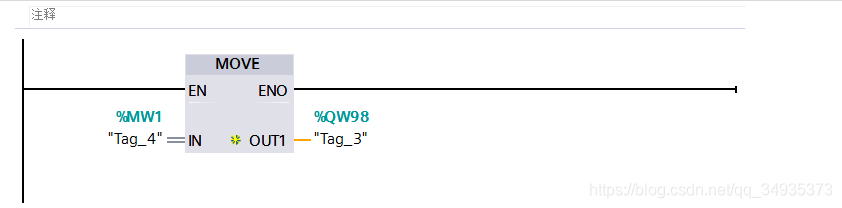
编写程序,通过修改参数MW3的值改变模拟量输出的电压大小。
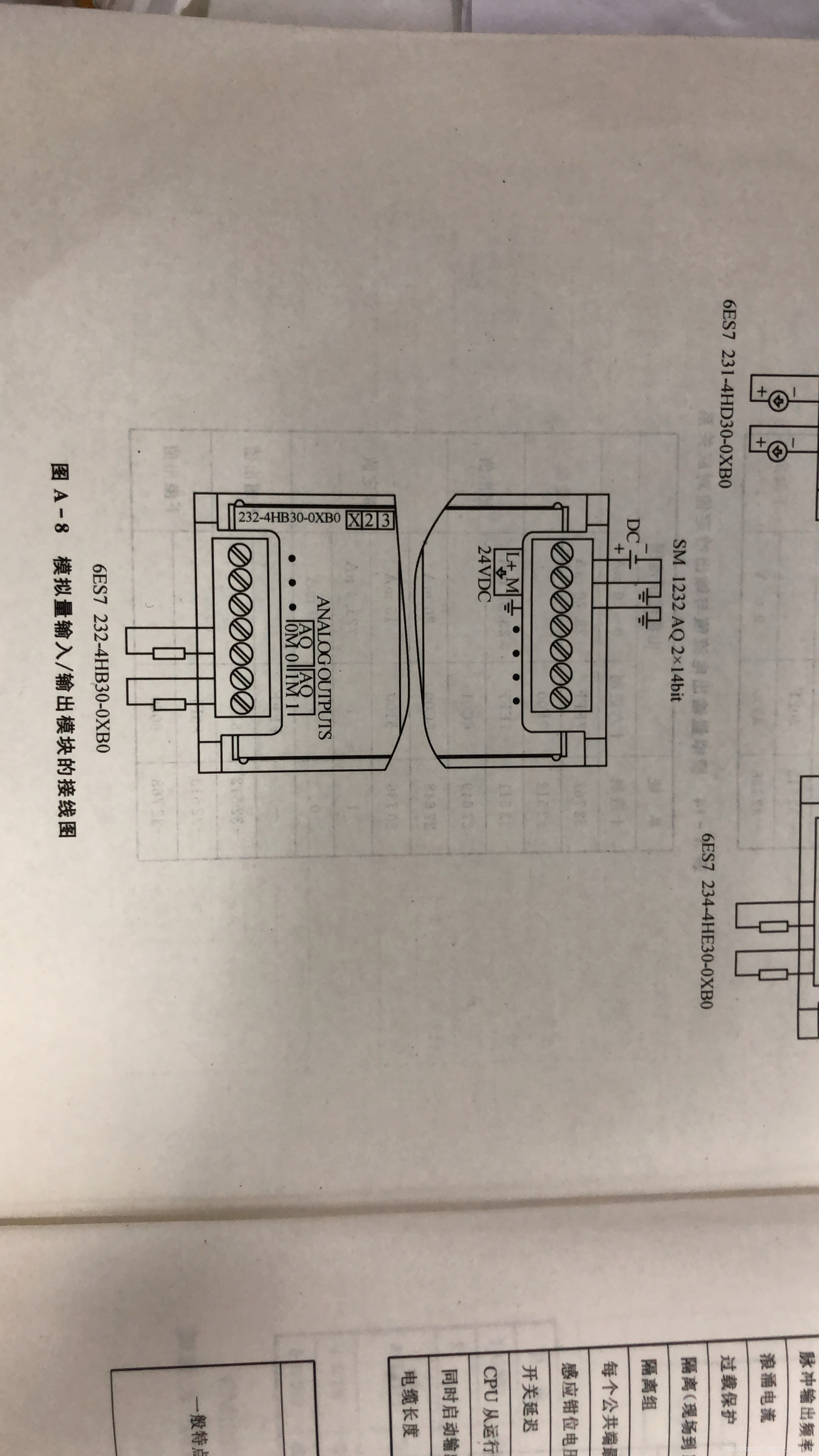
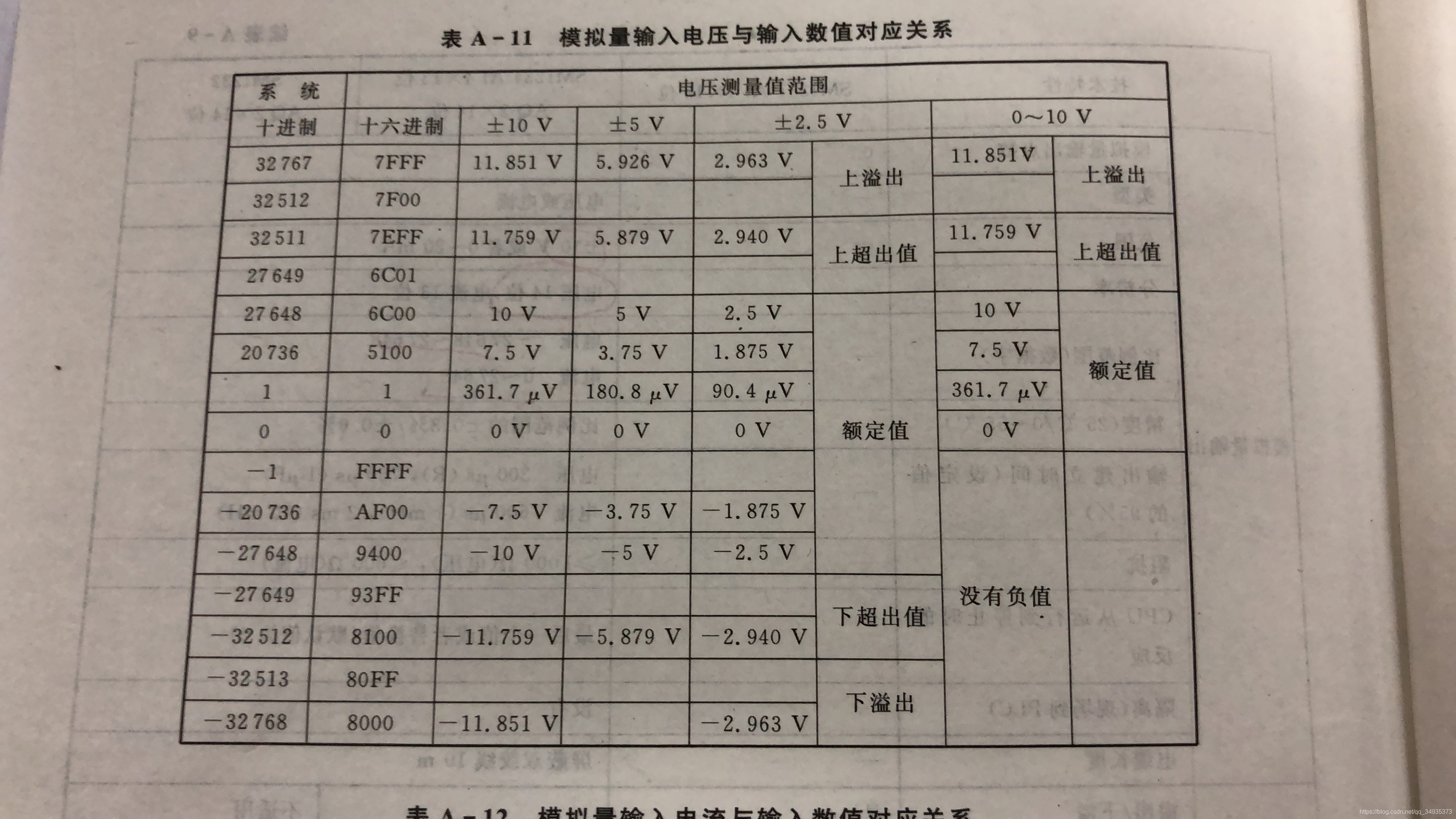
上面是模拟量模块的接线图,下面是模拟量输入和输出的对应关系,实测误差在0.04V左右,满足基本需求。
这个电压的输出曲线还是挺有意思,一开始随着16#的数字增大而增大,电压从0V增大至11.759V(16#7EFF)以后,断电保护,报错超出范围,(16#7F00到80FF之间都是这个状态,除去两点&16#7FFF和16#8000,两点为0V),然后8100到FFFF,随着数值的增大,电压从-11.759V逐渐增大到0V。
硬件部分:
这里使用模拟量控制需要修改前面电机调试后的一些参数。驱动器调节完毕后,回到terminal界面时候
驱动器增益调节结束后,在调试界面(如图1.a),分别输入RM=1;YA[4]=0的时候修改为YA[4]=4;
如果你按照之前的调试完,也可以再次输入YA[4]=4。如果不确定,可以直接输入YA[4],会出现驱动器设置的参数,
(这里插一句:模拟量控制的好处就是,FeedBackB口可以输出电机的编码器值,不需要再加另外的驱动器,PWM控制,实际上使用了两个编码器,一个是电机自带的,一个是外加的。)
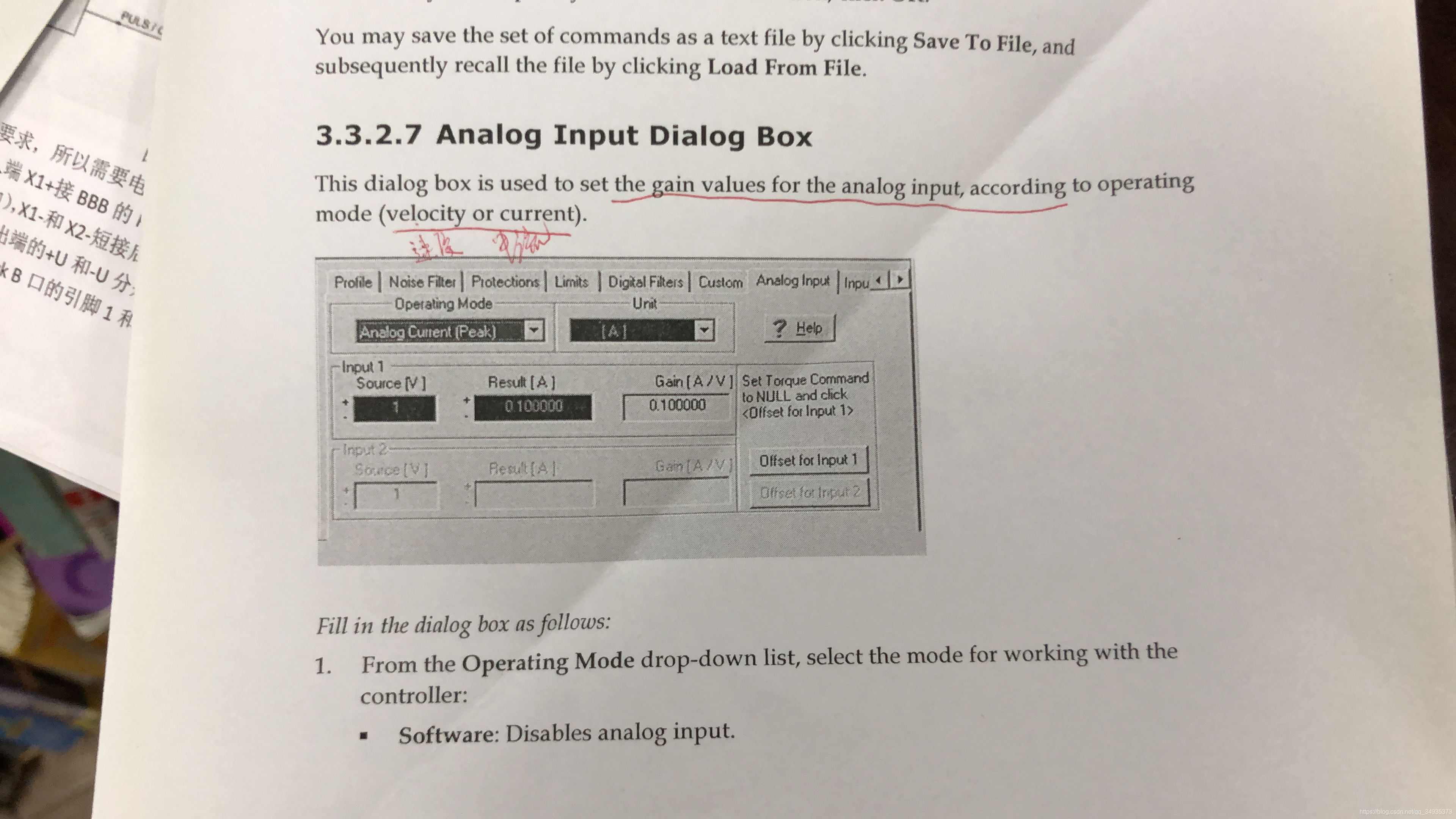
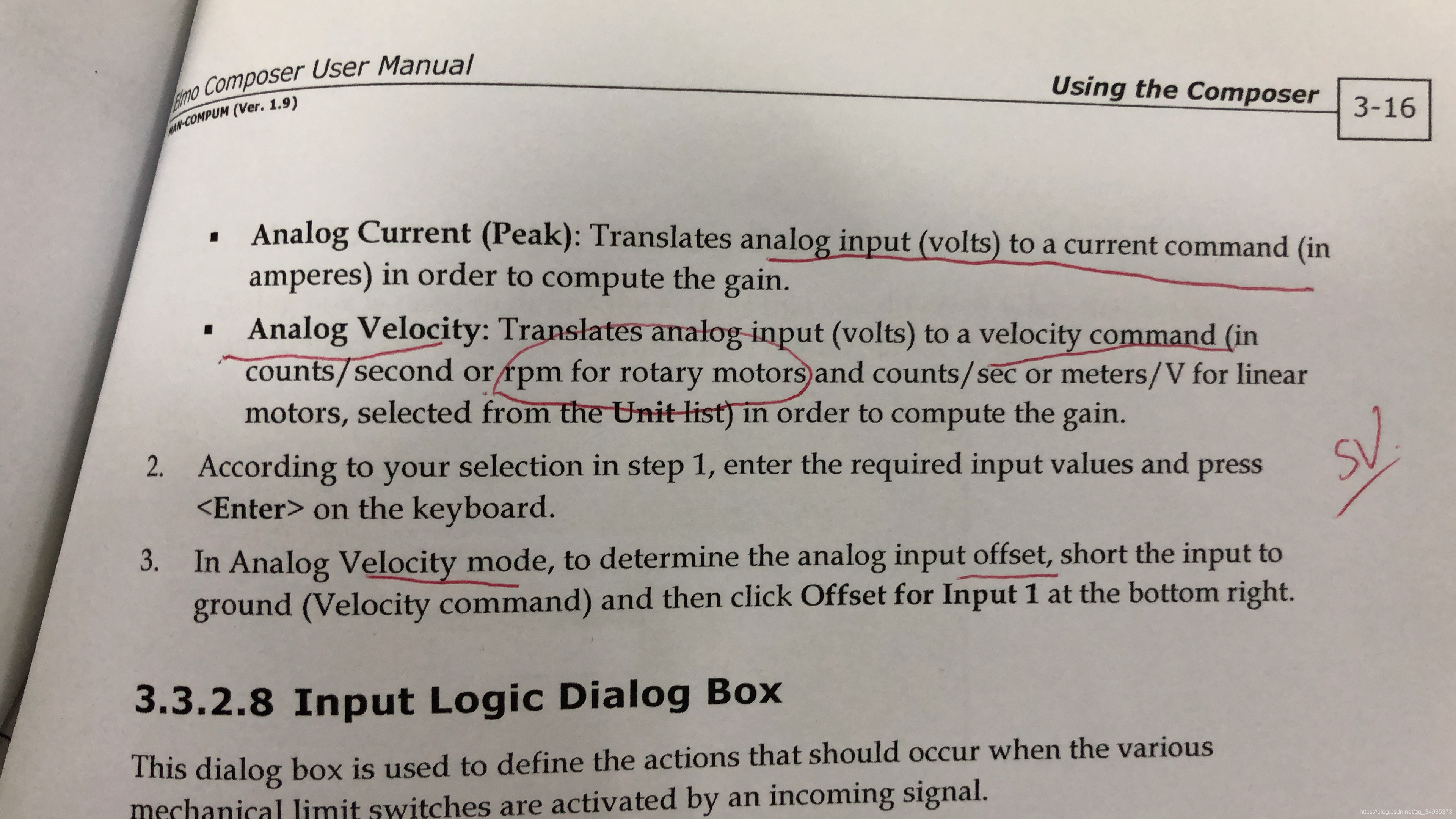
然后打开右侧的Analog Input的选项栏, Operating Mode 选择Analog Velocity,下面设置1V电压对应多少的转速,这里需要根据减速器的比例和实际自己需要的最大速度,自行计算。此处使用实验室经验数据 477.7r/min。
下面介绍硬件接线,和PWM不同的主要是FeedBack B 口和 J2口。(PWM使用了feedback B 口 feedback A口和J1口,未使用J2口) 。
模拟量控制时候四个口都使用了,其中Feedback A 和J2使能都是相同的,J1口用于接受模拟量控制,采用驱动器的analog 1口,
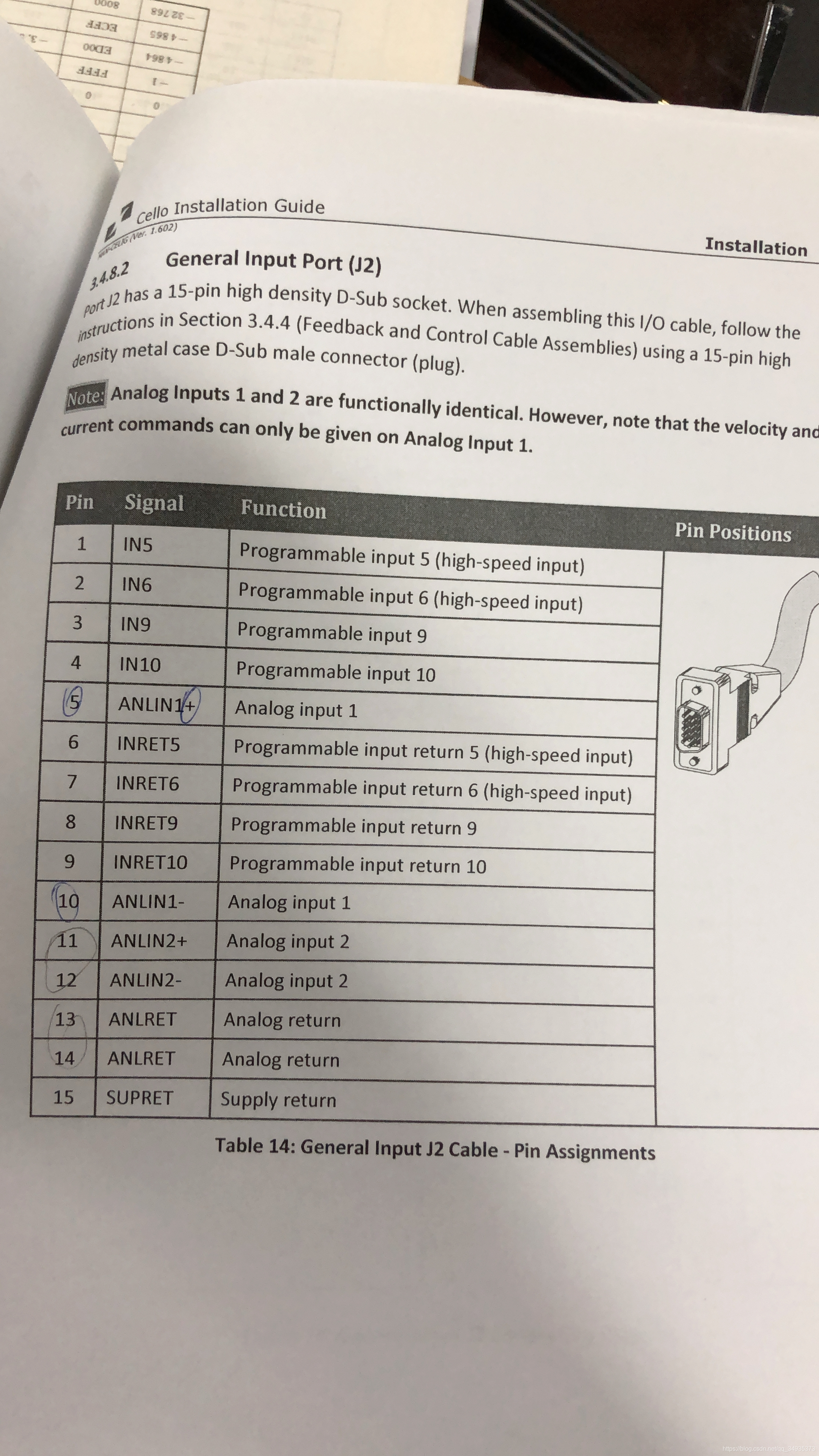
可以从上表看到5针接模拟量+输出口,10针接模拟量-口。
下面介绍feedback B接口,feedback B 将驱动器从 FeedBack A 采集到编码器信息通过转发值你想要采集的控制器口。
好了,建议测试前先检验PLC的输出电压是否合理,以免损坏驱动器,毕竟ELMO驱动器太贵了。。。。
上传了PTO测试程序在资源处,不过还在审核中,故没有贴链接,有需要自行查看。


















 1543
1543

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









