







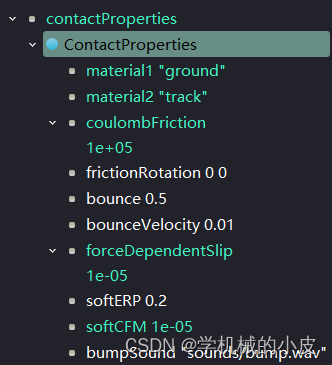
在worldinfo中,可以在contact下新建新的cantact properties,每个cantact properties可以设定两种材料之间的接触参数
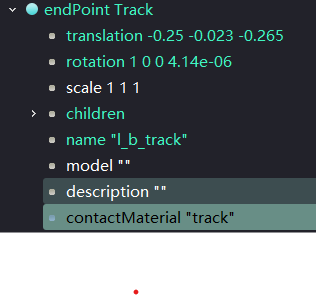
需要在每个部件下设置部件材料
在worldinfo中,可以在contact下新建新的cantact properties,每个cantact properties可以设定两种材料之间的接触参数
需要在每个部件下设置部件材料
 1172
1245
501
2262
1172
1245
501
2262

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言



























