






仅供本人查阅,后续继续更新
摄像头
[ERROR] [1703055233.697156571]: Failed to load nodelet [/camera/realsense2_camera] of type [realsense2_camera/RealSenseNodeFactory] even after refreshing the cache: Failed to load library /home/nas/librealsense/devel/lib//librealsense2_camera.so. Make sure that you are calling the PLUGINLIB_EXPORT_CLASS macro in the library code, and that names are consistent between this macro and your XML. Error string: Could not load library (Poco exception = libcv_bridge.so: cannot open shared object file: No such file or directory)
[ERROR] [1703055233.697231267]: The error before refreshing the cache was: Failed to load library /home/nas/librealsense/devel/lib//librealsense2_camera.so. Make sure that you are calling the PLUGINLIB_EXPORT_CLASS macro in the library code, and that names are consistent between this macro and your XML. Error string: Could not load library (Poco exception = libcv_bridge.so: cannot open shared object file: No such file or directory)
[FATAL] [1703055233.697460394]: Failed to load nodelet ‘/camera/realsense2_cameraof typerealsense2_camera/RealSenseNodeFactoryto managerrealsense2_camera_manager’
[camera/realsense2_camera-3] process has died [pid 10026, exit code 255, cmd /opt/ros/noetic/lib/nodelet/nodelet load realsense2_camera/RealSenseNodeFactory realsense2_camera_manager __name:=realsense2_camera __log:=/home/nas/.ros/log/8973e73c-9f04-11ee-98bc-2139a33fc35a/camera-realsense2_camera-3.log].
log file: /home/nas/.ros/log/8973e73c-9f04-11ee-98bc-2139a33fc35a/camera-realsense2_camera-3*.log
这个和opencv没有关系,主要是ros的库没有装好
sudo apt-get install ros-noetic-cv-bridge
[ERROR] [1703164922.142329182]: PluginlibFactory: The plugin for class ‘moveit_rviz_plugin/MotionPlanning’ failed to load. Error: According to the loaded plugin descriptions the class moveit_rviz_plugin/MotionPlanning with base class type rviz::Display does not exist. Declared types are rviz/AccelStamped rviz/Axes rviz/Camera rviz/DepthCloud rviz/Effort rviz/FluidPressure rviz/Grid rviz/GridCells rviz/Illuminance rviz/Image rviz/InteractiveMarkers rviz/LaserScan rviz/Map rviz/Marker rviz/MarkerArray rviz/Odometry rviz/Path rviz/PointCloud rviz/PointCloud2 rviz/PointStamped rviz/Polygon rviz/Pose rviz/PoseArray rviz/PoseWithCovariance rviz/Range rviz/RelativeHumidity rviz/RobotModel rviz/TF rviz/Temperature rviz/TwistStamped rviz/WrenchStamped rviz_plugin_tutorials/Imu
sudo apt-get install ros-noetic-moveit-ros-visualization
机械臂
jaka包
CMake Error at /opt/ros/noetic/share/catkin/cmake/catkinConfig.cmake:83 (find_package):
Could not find a package configuration file provided by “gazebo_plugins”
with any of the following names:gazebo_pluginsConfig.cmake gazebo_plugins-config.cmakeAdd the installation prefix of “gazebo_plugins” to CMAKE_PREFIX_PATH
or set “gazebo_plugins_DIR” to a directory containing one of the
above files. If “gazebo_plugins” provides a separate development
package or SDK, be sure it has been installed. Call Stack (most
recent call first): jaka_robot/src/jaka_gazebo/CMakeLists.txt:10
(find_package)
错误是找不到包“gazebo_plugins”。您可以尝试通过运行以下命令进行安装:
sudo apt-get install gazebo-plugins
sudo apt-get install ros-noetic-gazebo-ros-pkgs ros-noetic-gazebo-ros-control
如果这不起作用,您可以尝试手动将包路径添加到您的 CMAKE_PREFIX_PATH 环境变量中。为此,请打开一个终端并运行以下命令:
export CMAKE_PREFIX_PATH=$CMAKE_PREFIX_PATH:/path/to/gazebo_plugins
其中“/path/to/gazebo_plugins”是 gazebo_plugins 包安装的目录的路径。
CMake Error at /opt/ros/indigo/share/catkin/cmake/catkinConfig.cmake:83 (find_package):
Could not find a package configuration file provided by “moveit_msgs” with
any of the following names:
moveit_msgsConfig.cmake
moveit_msgs-config.cmake
Add the installation prefix of “moveit_msgs” to CMAKE_PREFIX_PATH or set
“moveit_msgs_DIR” to a directory containing one of the above files. If
“moveit_msgs” provides a separate development package or SDK, be sure it
has been installed.
Call Stack (most recent call first):
human_moveit_config/CMakeLists.txt:7 (find_package)
– Configuring incomplete, errors occurred!
See also “/home/onurtuna/catkin_ws/build/CMakeFiles/CMakeOutput.log”.
See also “/home/onurtuna/catkin_ws/build/CMakeFiles/CMakeError.log”.
Invoking “cmake” failed

sudo apt install ros-noetic-moveit
sudo apt-get install build-essential libgl1-mesa-dev
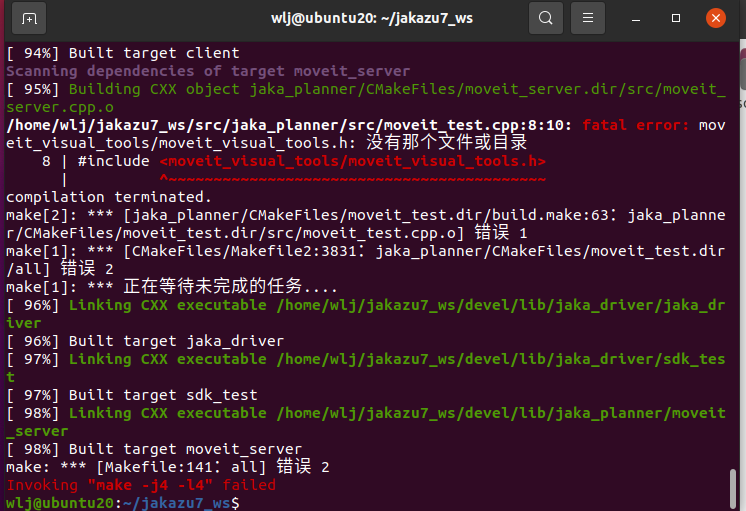
/home/wlj/jakazu7_ws/src/jaka_planner/src/moveit_test.cpp:8:10: fatal error: moveit_visual_tools/moveit_visual_tools.h: 没有那个文件或目录
8 | #include <moveit_visual_tools/moveit_visual_tools.h>
| ^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
compilation terminated.
make[2]: *** [jaka_planner/CMakeFiles/moveit_test.dir/build.make:63:jaka_planner/CMakeFiles/moveit_test.dir/src/moveit_test.cpp.o] 错误 1
make[1]: *** [CMakeFiles/Makefile2:3831:jaka_planner/CMakeFiles/moveit_test.dir/all] 错误 2
make[1]: *** 正在等待未完成的任务…
sudo apt-get install ros-noetic-moveit-visual-tools
该 moveit_visual_tools 包提供了一组用于可视化和调试机器人运动规划的工具。它包括用于可视化机器人轨迹、碰撞网格和关节限制的工具。它还包括用于调试机器人运动规划算法的工具。
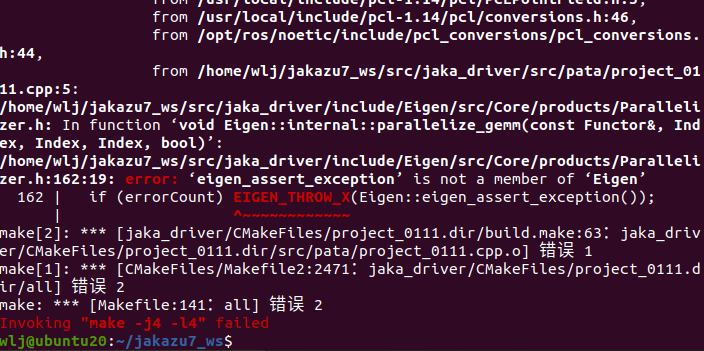
from /home/wlj/jakazu7_ws/src/jaka_driver/src/pata/project_0111.cpp:5:
/home/wlj/jakazu7_ws/src/jaka_driver/include/Eigen/src/Core/products/Parallelizer.h: In function ‘void Eigen::internal::parallelize_gemm(const Functor&, Index, Index, Index, bool)’:
/home/wlj/jakazu7_ws/src/jaka_driver/include/Eigen/src/Core/products/Parallelizer.h:162:19: error: ‘eigen_assert_exception’ is not a member of ‘Eigen’
162 | if (errorCount) EIGEN_THROW_X(Eigen::eigen_assert_exception());
| ^~~~~~~~~~~~~
make[2]: *** [jaka_driver/CMakeFiles/project_0111.dir/build.make:63:jaka_driver/CMakeFiles/project_0111.dir/src/pata/project_0111.cpp.o] 错误 1
make[1]: *** [CMakeFiles/Makefile2:2471:jaka_driver/CMakeFiles/project_0111.dir/all] 错误 2
make: *** [Makefile:141:all] 错误 2
解决办法:使用低版本PCL 或者 添加编译Eigen
下载源代码并解压 pcl-pcl-xxx.0.tar.gz
PCL下载地址
tar -xzvf pcl-pcl-xxx.0.tar.gz
---------------aarch 64--------
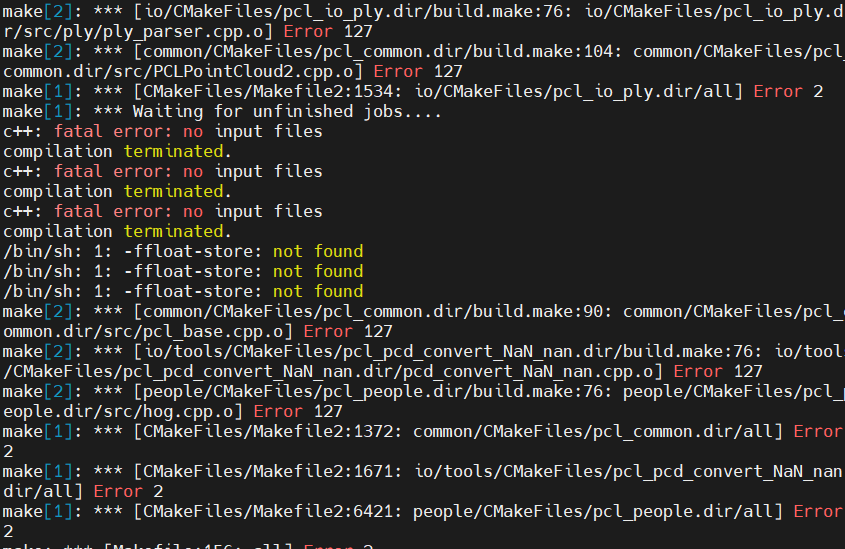
编译PCL点云出错,添加此命令
cmake -DCMAKE_CXX_FLAGS="-DCMAKE_CXX_FLAGS=-ffloat-store" ..
在官网Eigen中下载最新版安装包源码,或者可以直接使用wget命令进行下载。之后提取压缩包,进入提取出来的文件夹,在终端中打开,然后进行编译。
tar -xzvf eigen-3.x.x.tar.gz
mkdir build
cd build
cmake ..
sudo make install
最后检查是否安装成功,可以直接在编辑器中输入
aarch64 问题
无法使用sudo apt-get install ros-noetic-moveit-visual-tools
- sources.list
# 默认注释了源码镜像以提高 apt update 速度,如有需要可自行取消注释
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal main restricted universe multiverse
deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal main restricted universe multiverse
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal-updates main restricted universe multiverse
deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal-updates main restricted universe multiverse
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal-backports main restricted universe multiverse
deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal-backports main restricted universe multiverse
# 以下安全更新软件源包含了官方源与镜像站配置,如有需要可自行修改注释切换
deb http://security.ubuntu.com/ubuntu/ focal-security main restricted universe multiverse
deb-src http://security.ubuntu.com/ubuntu/ focal-security main restricted universe multiverse
# 预发布软件源,不建议启用
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal-proposed main restricted universe multiverse
deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal-proposed main restricted universe multiverse
wlj@ubuntu20:~/桌面$ apt show ros-noetic-moveit-visual-tools
Package: ros-noetic-moveit-visual-tools
Version: 3.6.1-1focal.20240509.221302
Priority: optional
Section: misc
Maintainer: Dave Coleman <dave@picknik.ai>
Installed-Size: 908 kB
Depends: libboost-filesystem1.71.0, libc6 (>= 2.14), libgcc-s1 (>= 3.0), libstdc++6 (>= 9), ros-noetic-geometric-shapes, ros-noetic-moveit-core, ros-noetic-moveit-ros-planning, ros-noetic-rviz-visual-tools, ros-noetic-cmake-modules, ros-noetic-geometry-msgs, ros-noetic-graph-msgs, ros-noetic-roscpp, ros-noetic-roslint, ros-noetic-std-msgs, ros-noetic-tf2-eigen, ros-noetic-tf2-ros, ros-noetic-trajectory-msgs, ros-noetic-visualization-msgs
Homepage: https://github.com/ros-planning/moveit_visual_tools
Download-Size: 302 kB
APT-Manual-Installed: yes
APT-Sources: http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu focal/main amd64 Packages
Description: Helper functions for displaying and debugging MoveIt data in Rviz via published markers

















 1447
1447











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











