







DoN Segmentation
之前的博客有过介绍几种地面点云提取or分割的方法,本次博客介绍一下通过差分法线特征(Difference of Normals features, DoN)的方式来进行分割。在pcl源码库中对应的接口函数为pcl::DifferenceOfNormalsEstimation类,该算法对于给定输入点云按照尺度进行分段,来进行查找属于给定比例尺度参数的点集。
DoN理论浅析
DoN算法提供一种计算高效、多尺度方式去处理无序的大场景点云数据。算法思想较为简单:对于每一个点
p
p
p在点云数据集
P
P
P中,根于不同的邻域大小来进行计算点
p
p
p的法向量,假设有两个邻域大小(也称作支撑半径)分别为
r
l
r_l
rl与
r
s
r_s
rs,其中
r
l
r_l
rl代表邻域范围较大,
r
s
r_s
rs代表邻域范围较小(
r
l
>
r
s
r_l>r_s
rl>rs);那么点
p
p
p对应的法向量分别为:
n
^
(
p
,
r
l
)
\hat{n}(p,r_l)
n^(p,rl)和
n
^
(
p
,
r
s
)
\hat{n}(p,r_s)
n^(p,rs)。获取不同邻域的法向量之后,对其进行差分运算,即可得到点
p
p
p的差分法向量。公式如下:
Δ
n
^
(
p
,
r
s
,
r
l
)
=
n
^
(
p
,
r
s
)
−
n
^
(
p
,
r
l
)
2
\Delta\hat{n}(p,r_s,r_l)=\frac{\hat{n}(p,r_s)-\hat{n}(p,r_l)}{2}
Δn^(p,rs,rl)=2n^(p,rs)−n^(p,rl)
从上述可以看到,
n
^
(
p
,
r
)
\hat{n}(p,r)
n^(p,r)为点
p
p
p的空间法向量估计,在邻域半径为
r
r
r的范围。当然,不同的邻域半径求取的法向量会有比较大的差异,见下图:

DoN算法主要是观察在任何给定半径的情况下进行曲面法线估计,反映的是曲面在支撑不同比例半径下的基本几何体。尽管有很多种方法来进行曲面法线的估计,但是法线总是以一个支持半径(或者通过一定数量的邻域点)来进行估计的。这样支持半径就能够确定法线表示在该尺度下的曲面结构。上图在一维情况下简单表述DoN的过程,我们可以看到在小邻域的法线估计 n ^ \hat{n} n^和切线 T T T很容易受到小尺度的表面结构或类似噪声的干扰。另一方面,大邻域的半径估计法线和切线收小尺度结构的干扰较小。
Steps Difference of Normals for Segmentation
- 对每个点 p p p使用比较大的支持半径邻域 r l r_l rl进行法线估计;
- 对每个点 p p p使用比较小的支持半径领域 r s r_s rs进行法线估计;
- 对每个点按照上述法线差分公式进行计算出每个点的DoN;
- 按照阈值Threshold过滤生成的向量场以隔离属于所需要感兴趣的尺度/区域。
代码部分
#include <string>
#include <chrono>
#include <pcl/point_types.h>
#include <pcl/io/pcd_io.h>
#include <pcl/search/organized.h>
#include <pcl/search/kdtree.h>
#include <pcl/features/normal_3d_omp.h>
#include <pcl/filters/conditional_removal.h>
// #include <pcl/segmentation/extract_clusters.h>
#include <pcl/features/don.h>
using namespace pcl;
int main (int argc, char *argv[])
{
///The smallest scale to use in the DoN filter.
double scale1;
///The largest scale to use in the DoN filter.
double scale2;
///The minimum DoN magnitude to threshold by
double threshold;
if (argc < 5)
{
std::cerr << "usage: " << argv[0] << " inputfile smallscale largescale threshold segradius" << std::endl;
exit (EXIT_FAILURE);
}
/// the file to read from.
std::string infile = argv[1];
/// small scale
std::istringstream (argv[2]) >> scale1;
/// large scale
std::istringstream (argv[3]) >> scale2;
std::istringstream (argv[4]) >> threshold; // threshold for DoN magnitude
// Load cloud in blob format
pcl::PCLPointCloud2 blob;
pcl::io::loadPCDFile (infile.c_str (), blob);
pcl::PointCloud<PointXYZI>::Ptr cloud (new pcl::PointCloud<PointXYZI>);
pcl::fromPCLPointCloud2 (blob, *cloud);
auto startTime = std::chrono::steady_clock::now();
// Create a search tree, use KDTreee for non-organized data.
pcl::search::Search<PointXYZI>::Ptr tree;
if (cloud->isOrganized ())
{
tree.reset(new pcl::search::OrganizedNeighbor<PointXYZI>());
}
else
{
tree.reset(new pcl::search::KdTree<PointXYZI>(false));
}
// Set the input pointcloud for the search tree
tree->setInputCloud(cloud);
if (scale1 >= scale2)
{
std::cerr << "Error: Large scale must be > small scale!" << std::endl;
exit (EXIT_FAILURE);
}
// Compute normals using both small and large scales at each point
pcl::NormalEstimationOMP<PointXYZI, PointNormal> ne;
ne.setInputCloud(cloud);
ne.setSearchMethod(tree);
/**
* NOTE: setting viewpoint is very important, so that we can ensure
* normals are all pointed in the same direction!
*/
ne.setViewPoint(std::numeric_limits<float>::max(), std::numeric_limits<float>::max(), std::numeric_limits<float>::max());
// calculate normals with the small scale
std::cout << "Calculating normals for scale..." << scale1 << std::endl;
pcl::PointCloud<PointNormal>::Ptr normals_small_scale(new pcl::PointCloud<PointNormal>);
ne.setRadiusSearch(scale1);
ne.compute(*normals_small_scale);
// calculate normals with the large scale
std::cout << "Calculating normals for scale..." << scale2 << std::endl;
pcl::PointCloud<PointNormal>::Ptr normals_large_scale(new pcl::PointCloud<PointNormal>);
ne.setRadiusSearch(scale2);
ne.compute(*normals_large_scale);
// Create output cloud for DoN results
PointCloud<PointNormal>::Ptr doncloud(new pcl::PointCloud<PointNormal>);
copyPointCloud(*cloud, *doncloud);
std::cout << "Calculating DoN... " << std::endl;
// Create DoN operator
pcl::DifferenceOfNormalsEstimation<PointXYZI, PointNormal, PointNormal> don;
don.setInputCloud(cloud);
don.setNormalScaleLarge(normals_large_scale);
don.setNormalScaleSmall(normals_small_scale);
if (!don.initCompute ())
{
std::cerr << "Error: Could not initialize DoN feature operator" << std::endl;
exit (EXIT_FAILURE);
}
// Compute DoN
don.computeFeature(*doncloud);
// Save DoN features
pcl::PCDWriter writer;
writer.write<pcl::PointNormal>("don.pcd", *doncloud, false);
// Filter by magnitude
std::cout << "Filtering out DoN mag <= " << threshold << "..." << std::endl;
// Build the condition for filtering
pcl::ConditionOr<PointNormal>::Ptr range_cond(new pcl::ConditionOr<PointNormal>());
range_cond->addComparison (pcl::FieldComparison<PointNormal>::ConstPtr (
new pcl::FieldComparison<PointNormal>("curvature", pcl::ComparisonOps::GT, threshold)));
// Build the filter
pcl::ConditionalRemoval<PointNormal> condrem;
condrem.setCondition(range_cond);
condrem.setInputCloud(doncloud);
pcl::PointCloud<PointNormal>::Ptr doncloud_filtered(new pcl::PointCloud<PointNormal>);
// Apply filter
condrem.filter(*doncloud_filtered);
doncloud = doncloud_filtered;
// Save filtered output
std::cout << "Filtered Pointcloud: " << doncloud->size() << " data points." << std::endl;
auto endTime = std::chrono::steady_clock::now();
auto ellapsedTime = std::chrono::duration_cast<std::chrono::milliseconds>(endTime - startTime);
std::cout << "Ellapse-Time: " << ellapsedTime.count() << " milliseconds." << std::endl;
writer.write<pcl::PointNormal>("don_filtered.pcd", *doncloud, false);
}
上述代码我为了测试地面过滤效果,把官方原始的后续欧式聚类给去除掉了。上面的代码经过cmake编译后,你只需要在终端输入如下就可以获取结果:
./don_segmentation <inputfile> <smallscale> <largescale> <threshold> <segradius>
// example is as follows:
./don_segmentation apollo.pcd 0.4 4 0.3
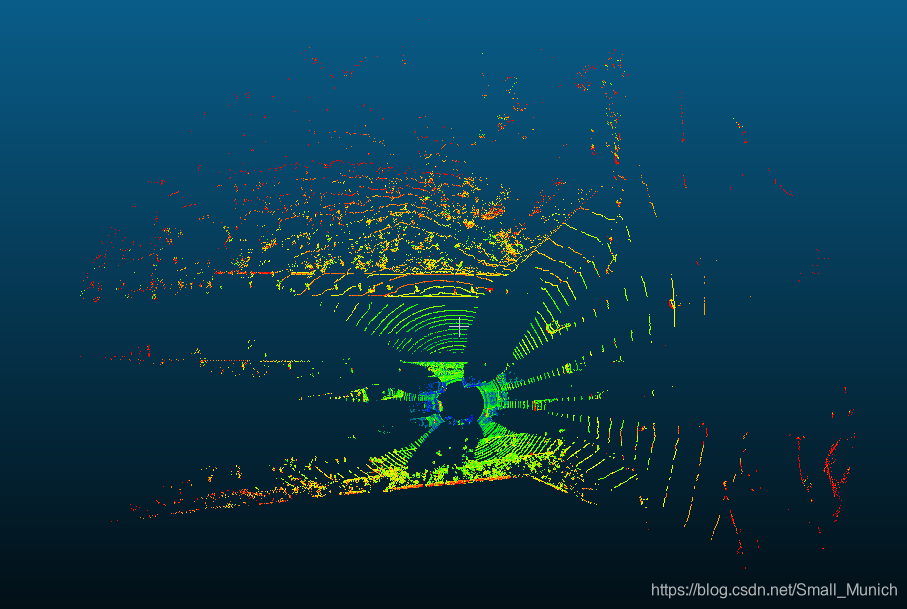
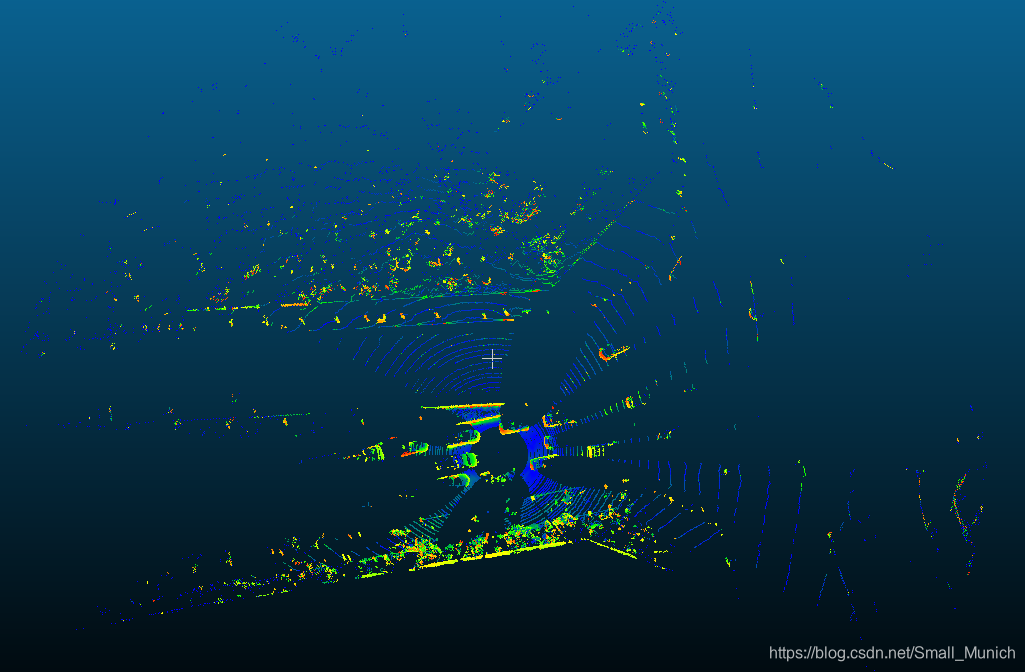
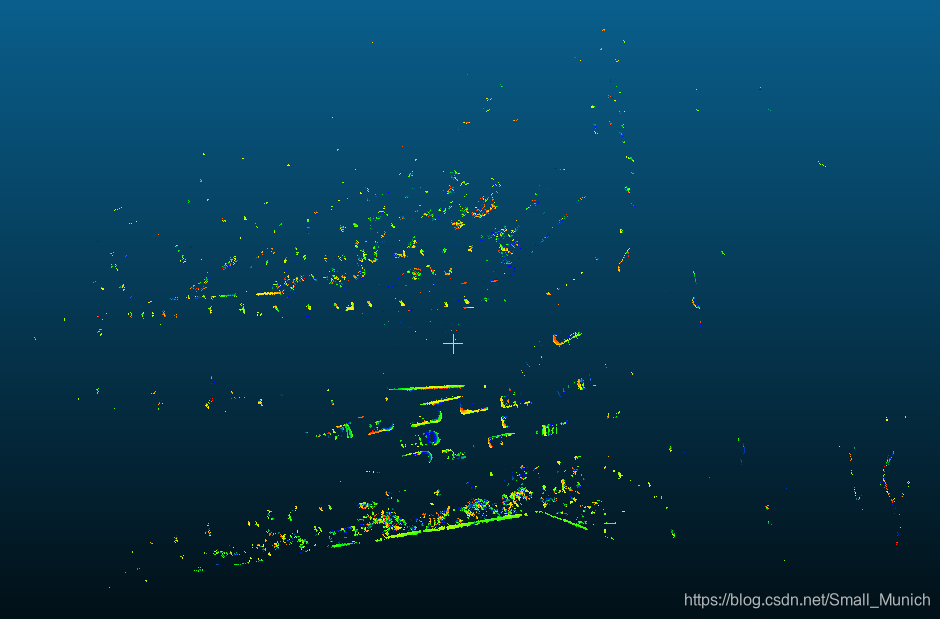
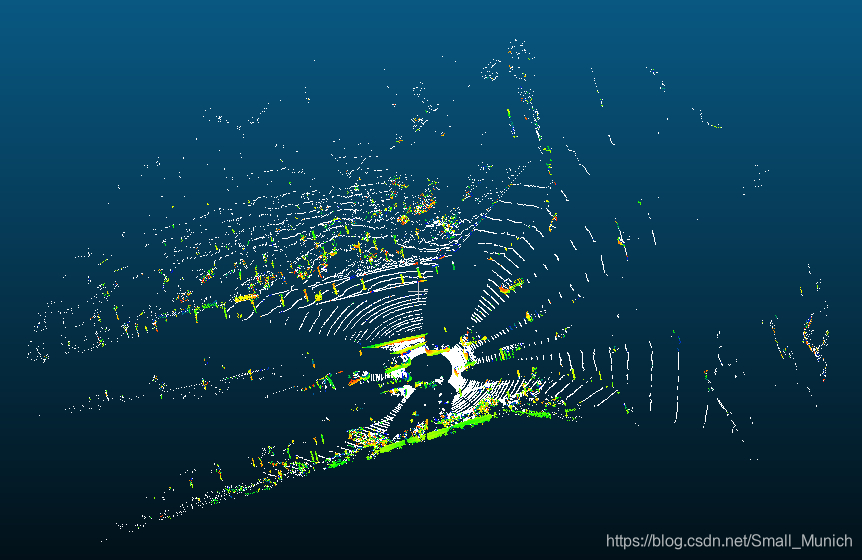
Demo实验结果可视化
论文中作者进行分割参数阈值的经验:
| 类别 | r s r_s rs | r l r_l rl | Δ n ^ \Delta\hat{n} Δn^ |
|---|---|---|---|
| 行人 | 0.1 | 0.4 | r l r s ≈ 10 \frac{r_l}{r_s}\approx10 rsrl≈10 |
| 车辆 | 0.4 | 2.0 | r l r s ≈ 10 \frac{r_l}{r_s}\approx10 rsrl≈10 |

论文中在滤波阶段丢弃
∣
Δ
n
^
∣
≤
0.25
|\Delta\hat{n}|\leq0.25
∣Δn^∣≤0.25的点云法线差分阈值,保留剩余下来的点云。由上图可视化可以看到,尺度较小时能够保留下道路中的边缘信息,随着尺度加大,只能够留下来具有较大的结构。这与图像中尺度空间原理一致。
消除不同尺度下法线差异由于方向估计模棱两可的情况:

小结
DoN(法线差异)求取方式思想主要来源于DoG(差分高斯),我们都了解图像邻域DoG的应用多么有效,大名鼎鼎的SIFT算法就是采用DoG来提取图像特征。所有DoN在三维点云应用中,主要在有方向的3D边缘检测、平面区域分割等领域应用较好。很容易理解DoN主要也是在寻找三维空间中的显著性特征,就像图像领域中的梯度变化类似。但是,我们可以发现将法线差分的方式应用到地面点提取时候,会存在一些高程较高的平面被滤除掉,例如作者论文中的房屋结构信息等。另外,该方法耗时比较大,参数对于尺度较为敏感,不同的尺度参数分割出来差距会比较明显。同时该算法应用在离线点云处理可以,实时性地面分割无法有效保证使用。
参考
https://pcl-tutorials.readthedocs.io/en/latest/don_segmentation.html#don-segmentation

















 746
746

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









