







文章目录
前言
离合器作为汽车动力传输的关键部件,不仅在传统的汽车变速器时代发挥了重要的作用,在新能源的浪潮下,其也在发挥着自己独特的作用,常见到的离合器包括湿式离合器,干式离合器,狗齿离合器等。离合器作为动力传输的部件,其控制的精度不仅会影响到动力衔接的舒适性,也会影响到其使用的年限,如何保持控制的一致性,是一大难点,工程上常用的方法是通过离合器的结合特性在整车运行过程中通过自学习的方式,弥补其特性差异带来的一致性问题。本文主要是漫谈湿式液压控制离合器kisspoint(简称KP)点的学习策略,给相关的工程师一点思考。
一、KP点是什么?
离合器的KP点指的是离合器克服分离弹簧的作用力,将摩擦片和钢片开始压紧时,需要的活塞推力(或者压力),在工程上常用来表示0Nm或2Nm扭矩传递点。当离合器达到这个扭矩之后,随着输入扭矩的增加,其传递扭矩和活塞位移的关系会呈现出比较线性的直线,由于选取离合器特性不一样,也有的离合器会经过一段非线性区,通常会在0Nm~60Nm为非线性区,在60Nm(不同离合器取值会发生变化)以上为线性区。
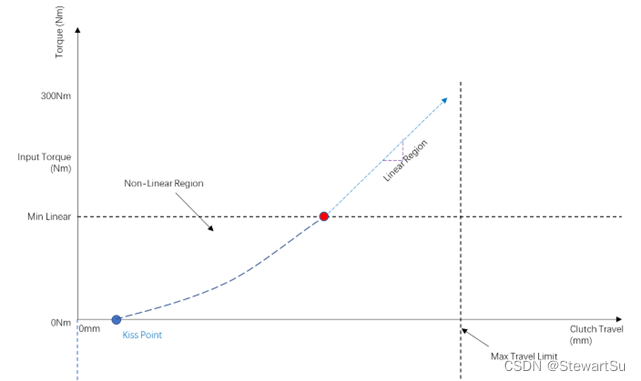
图1:离合器的位移-扭矩曲线
二、离合器KP点的控制方法
离合器的控制按照常规的控制方法一般是先将离合器的位置控制到Kp点,然后跟随动力源的扭矩进行离合器压力或者位移的控制,使其结合后稳定的传递动力源的扭矩。
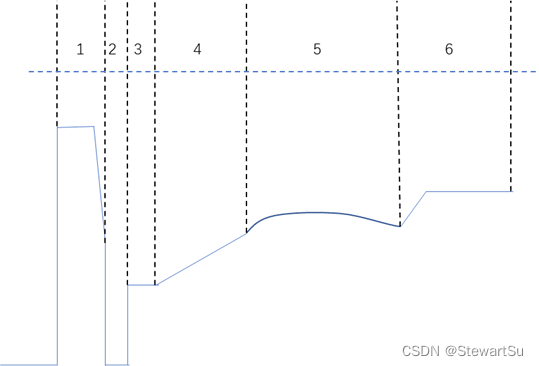
图2:离合器结合时的压力控制曲线
上图为离合器从打开状态到结合状态的一个示意图,其每个阶段的控制方式如下:
- Ph1:离合器Boost阶段,快速对离合器空腔进行填充;
- Ph2:离合器消除迟滞,跟液压阀的结构和液压系统息息相关,在部分系统上可以省略掉;
- Ph3:KP点稳定阶段,使液压系统稳定,为后续离合器的控制做准备;
- Ph4:离合器压力快速上升阶段,此阶段的目的是离合器传递扭矩快速达到动力源扭矩;
- Ph5:离合器调速阶段,使离合器的输入端和输出端的转速同步,常采用PI控制算法,Err输入可以为转速差,也可以为转速差的变化率;
- Ph6:离合器增压稳定阶段,当离合器转速同步后快速增加离合器压力,压紧离合器,使动力源的扭矩稳定的传递到轮端。
其中Ph1,Ph2,Ph3都是KP点的控制逻辑,工程上自学习的时候,通常会对Ph1的时间,以及Ph3的压力点进行自适应,以达到获取匹配每一辆车的半结合点的特性参数。
三、离合器KP点的自学习方法
3.1 扭矩增量式
该方法主要应用在车辆处于静态工况下,发动机怠速时,通过增加离合器的压力,观测动力源的扭矩增量,从而对离合器的KP点进行检测。

图3:扭矩增量式扰动曲线
如上图所示,在动力源稳定怠速的工况下,对离合器进行充油,稳定在KP点时若动力源扭矩增量小于设定的阈值,则逐渐增加KP点的压力,直到其达到设定的最小阈值,考虑到扭矩的精度,故设定的阈值不应国小,得到ΔKP后,需要减去一定的补偿量,以弥补设定的阈值较大的因素,从而获得KP点的压力值。其中Ph1的时间自学习也可以采用相同的方法,当扭矩增量达到设定阈值时,快速撤掉压力,减弱给整车带来的抖动。
应用范围包括传统的DCT,AT,P1&P3架构的DHT(使用离合器将P1&Eng动力输出的混动架构)。
3.2 转速变化式
该方法相较于扭矩增量,观察的是在增加离合器压力或者充油时间时,其动力源转速或者输出轴转速的波动情况。
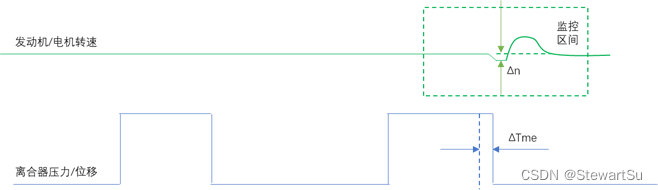
图4:转速变化式扰动曲线
如上图所示,在动力源稳定怠速的工况下,对离合器进行充油,在充油过程中监控动力源的转速变化,当其抖动达到设定的阈值的时候,记录此时充油时间的增量ΔTme,考虑到压力的滞后性等因素,在学习得到的时间增量的基础上减去一定的补偿量,从而得到Boost的准确时间。工程上观测抖动的时间段叫做监控区间,其一般在充油开始后一段时间内开启,可以在检测到满足需求后的扰动后结束,也可以在boost reset后,仍然监控一段的时间观测是否会有扰动(主要是考虑液压的迟滞性)。其中KP点的压力也可以用这种方法来测试。
应用范围包括传统的DCT,AT,P1&P3架构的DHT(使用离合器将P1&Eng动力输出的混动架构)。
转速变化式除了在静态稳定工况下能够进行自学习,在高速稳定工况下也可以实现自学习的效果,应用范围主要是多档位,多片离合器的动力传输装置,如多档DHT,AT,DCT。
高速稳定工况下,固定档位传输动力源扭矩的同时,将下一个档位(升档或降档)对应的离合器进行充油,由于档位速比的原理,此时动力链会出现功率回流,整车车速会出现一定程度的扰动。此时的监控区间一般在充油开始后一段时间内开启,并且在boost reset后,仍然监控一段的时间观测是否会有扰动(主要是考虑液压的迟滞性)。该方法对工况的稳定性要求较高,需要稳定的扭矩,且在监控窗口之外不能有其它因素引起的扰动超过设定的监控区间内的扰动量,否则此次测试为无效的测试,重新进行充油测试;但好处是自学习的机会要比静态稳定工况要多。
3.3 其它方法
针对特定的构型,比如DCT还有其它的方法,如在行驶过程中,通过结合不传递动力的离合器(该离合器对应的档位应脱空),观察输出轴转速的变化率,通过惯性矩的计算,获得KP点的压力修正。
同时还可以观察档位从空挡到结合离合器传递动力的时候,观察动力源从充油完成到转速开始下降的时间段,通过时间段的长短来修正KP压力值。
方法有很多,KP点压力和boost自学习的目的是将离合器控制到稳定的KP点,从而使离合器的增扭阶段能够实现压力/位移VS扭矩的线性或者近似线性的控制,提高控制的一致性。
3.4 扰动参数的设计技巧
离合器的Kp点主要是消除离合器片间隙需要抵消弹簧的作用力,使离合器片接触,此时会传递一定的动力源扭矩(电机或者发动机扭矩),故而可以从如下角度来观察,不同厂家可能不太一样,但大多数都差不多:
- 加装压力传感器(或者前期测试箱子单独加装):一般充油到Kp点之后(比如200ms),其压力传感器的压力不会再继续往上增加,也不会继续往下减小,其正好维持一个平衡点;
- 观察输入动力源(电机或者发动机)的转速波动,有的会观察转速变化率(rpm/s,比如50rpm/s),有的会观察转速相较于稳定状态下下跌或上升的最大转速(delta_Speed,比如20rpm),这个跟输入端的惯量相关,需要单独区分;
- 有的还可根据升档过程中的转速控制,比如在升档离合器交互时,动力源转速flare,则可以简单的判定Kp点设置偏低,导致压力跟随性较差。但这种方式只能用作Rough方式的自学习。
- 观察动力源扭矩的变化,在离合器从0达到Kp点之后,动力源的扭矩一般会增加一个值,增量的话根据场景和产品不同,可以有5Nm-10Nm的变化,在这个值的基础上,再减去一个固定值进行修正,可以作为Kp点的值。需要动力源扭矩灵敏和精度要求高点。
- 还有一些方法,比如在传统变速箱中,脱空拨叉档位,结合离合器,观察输入轴被带起的转速(300rpm~400rpm)等等。
- P1+P3架构的学习起来比较方便,可以在串联模式下进行,也可以在P/N档怠速下进行。
总结
离合器在动力传输中占有很重要的位置,无论是传统的变速箱,还是新能源混动构型,还是纯电动多档位变速箱,都有其应用场景。其KP点的自学习在其控制应用中扮演着重要的位置,是提高驾驶舒适性的重要手段,是影响产品一致性,以及能否顺利SOP的关键技术,需要根据其应用场景和离合器特性进行适应性的选取方法,从而达到最佳的效果。

















 412
412

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









