






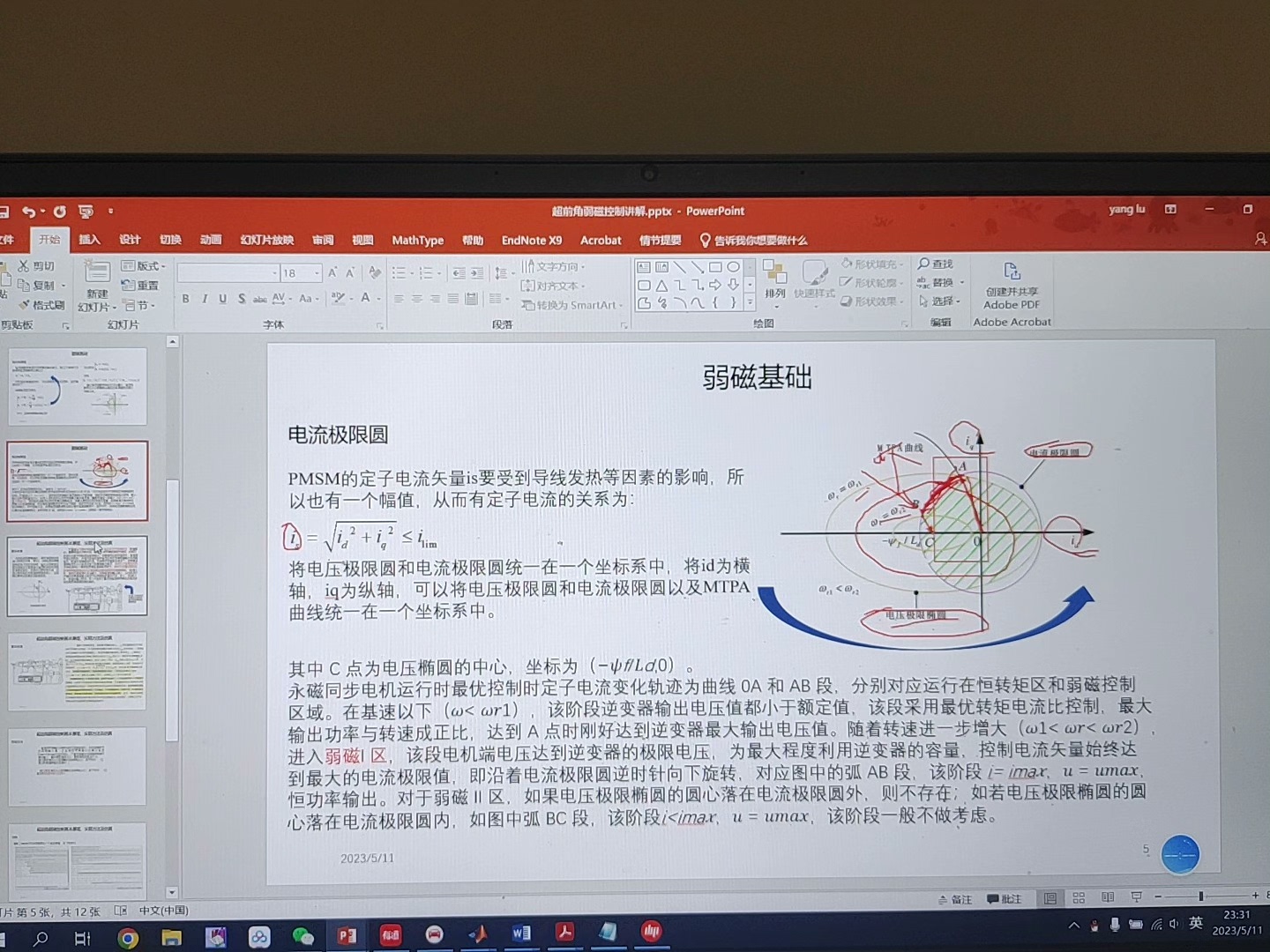
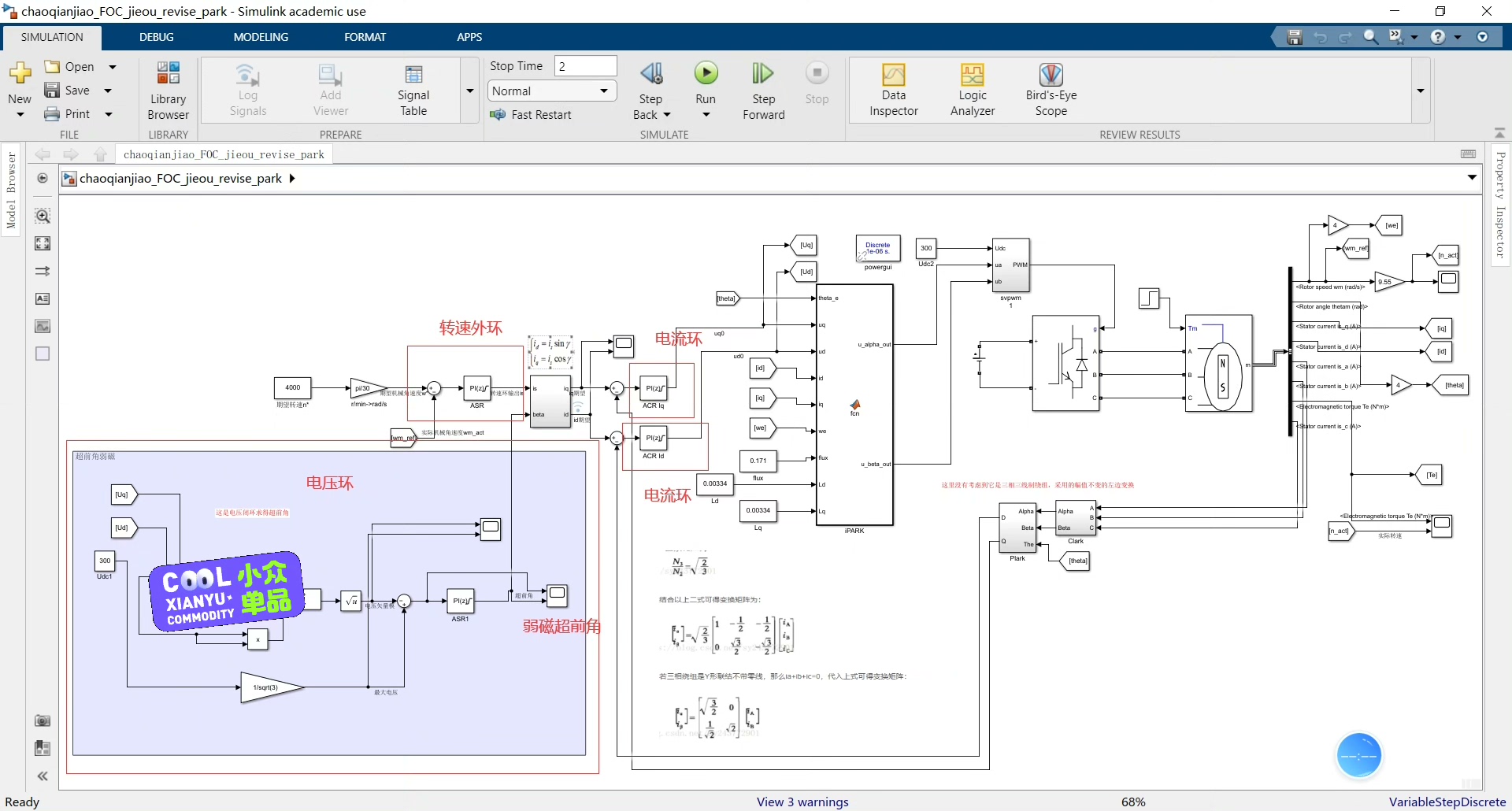
永磁同步电机超前角弱磁控制,抵抗负载扰动,切换弱磁的过程较为平滑,主要原理是通过电压反馈,得到偏转角度theta,并通过id=iscos(theta)的方式控制弱磁电流。
该弱磁控制为一个多闭环系统,由两个电流环、一个电压闭环和一个转速外环构成。
电流环可以使电机具有较好的动态性能,当负载转矩发生突变时使系统仍能够较稳定的运行:转速外环控制可以达到无差控制的目的:电压环的作用是当电机转速超过转折速度时,可以输出一个负的超前角,从而产生一个反向的去磁电流,同时减小交轴电流,使电机稳定运行在弱磁区域。
此外,电机从恒转矩区向弱磁区域的过渡是通过电压环自动改变超前角 来实现的,切换较为平滑切换过程中电机的转速和转矩波动较小。
实现方法:电流调节器输出Ud和Uq经过低通滤波后,作为弱磁环节的控制输入量,并且和逆变器输出的最大电压Umax=Udc/sqrt(3)进行对比,二者的差值作为弱磁环PI调节器的输入,输出超前角度大小,超前角范围是-pi/2~0。
通过超前角的大小控制输出的id和iq大小(注意此时转速环输出的是is)。
电机参数:选取MATLAB2021a自带电机参数额定转矩10N.m,300Vdc,最大转矩14.2N.m,额定转速2300r/min(限制在该转速范围内),表贴式电机,电感为0.00334H,转子磁链为0.171wb。
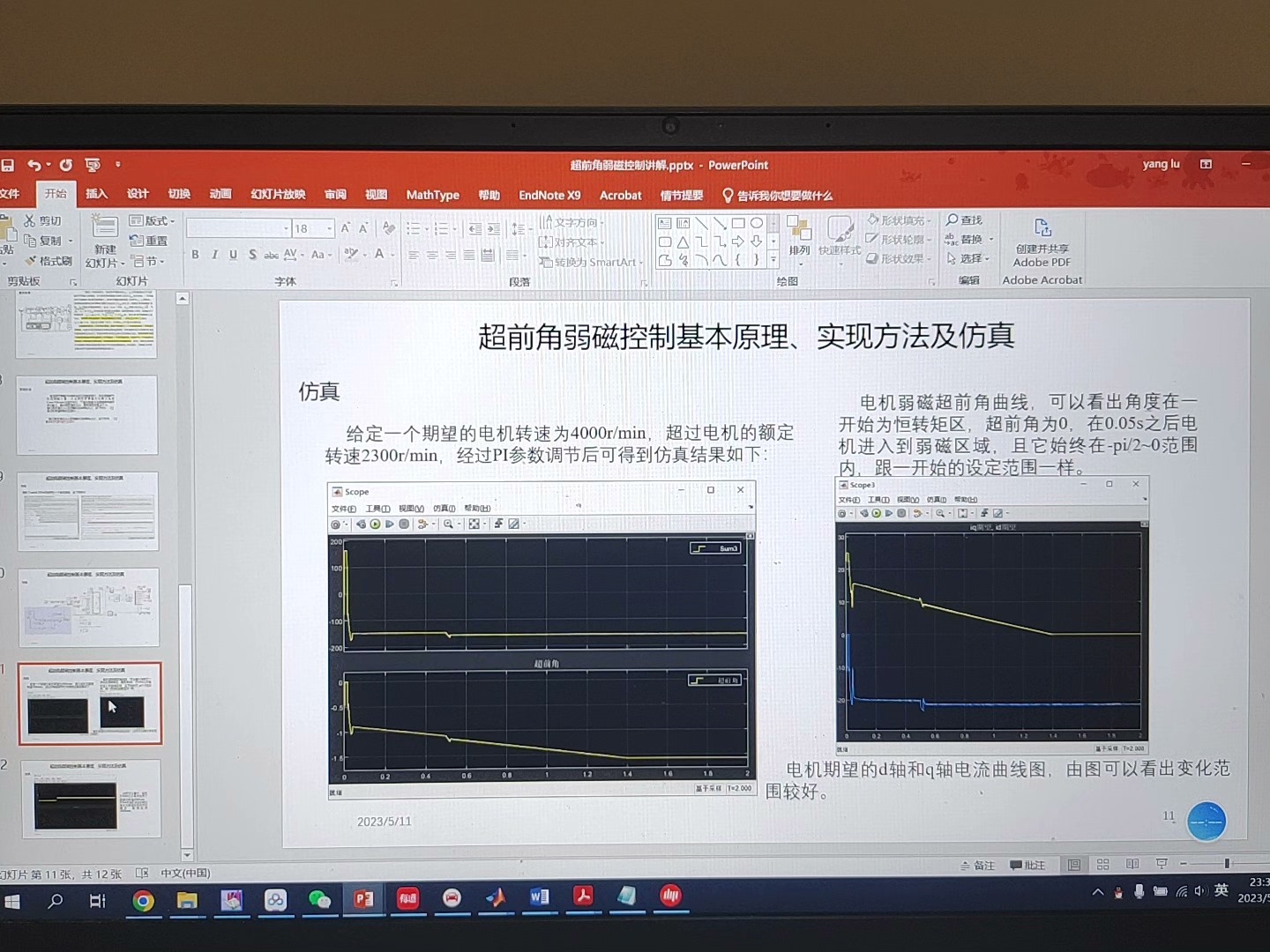
控制效果:(1)给定一个期望的电机转速为4000r/min,超过电机的额定转速2300r/min,经过PI参数调节后,从电机弱磁超前角曲线,可以看出角度在一开始为恒转矩区,超前角为0,在0.05s之后电机进入到弱磁区域,且它始终在-pi/2~0范围内,跟一开始的设定范围一样。
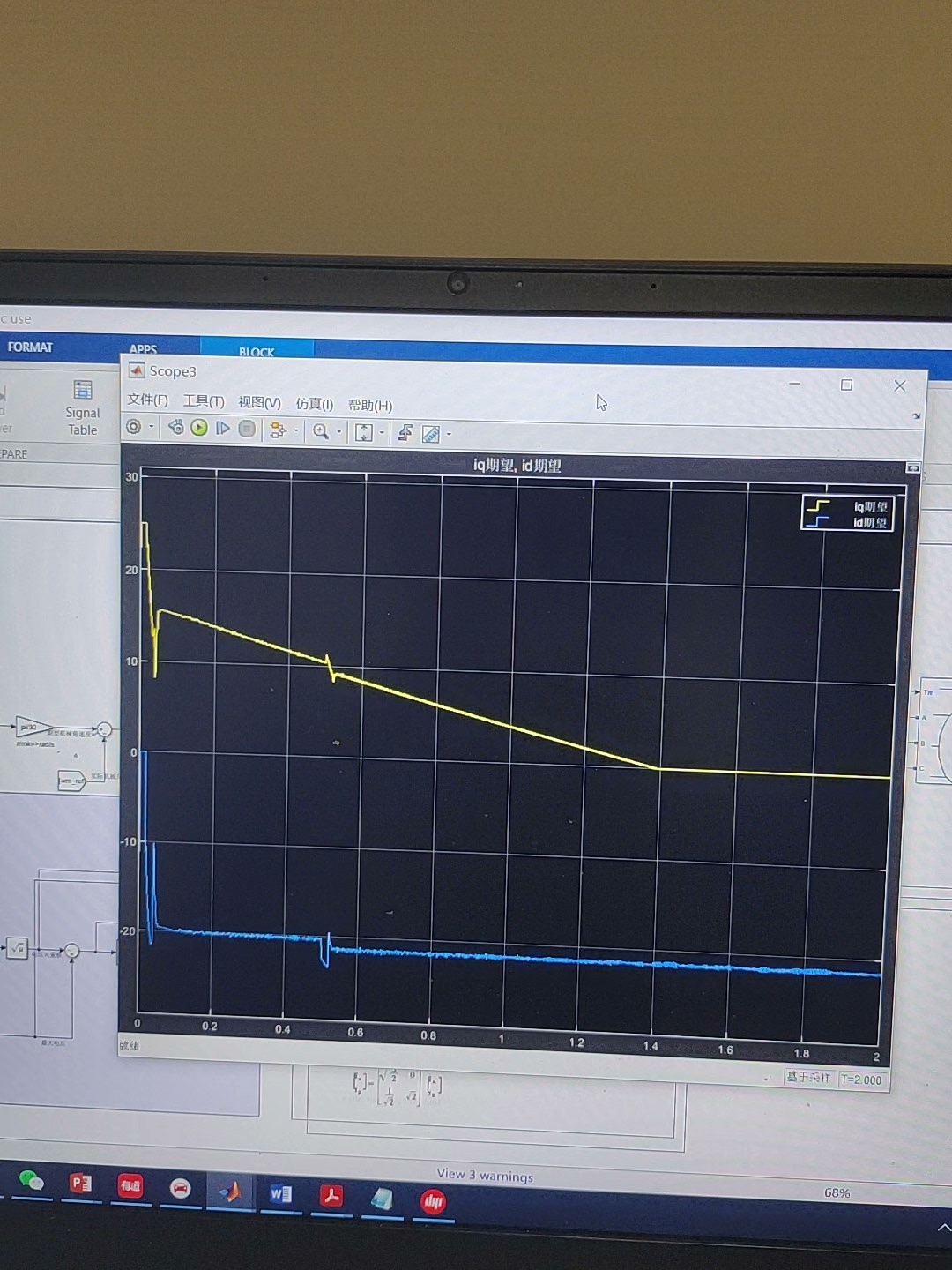
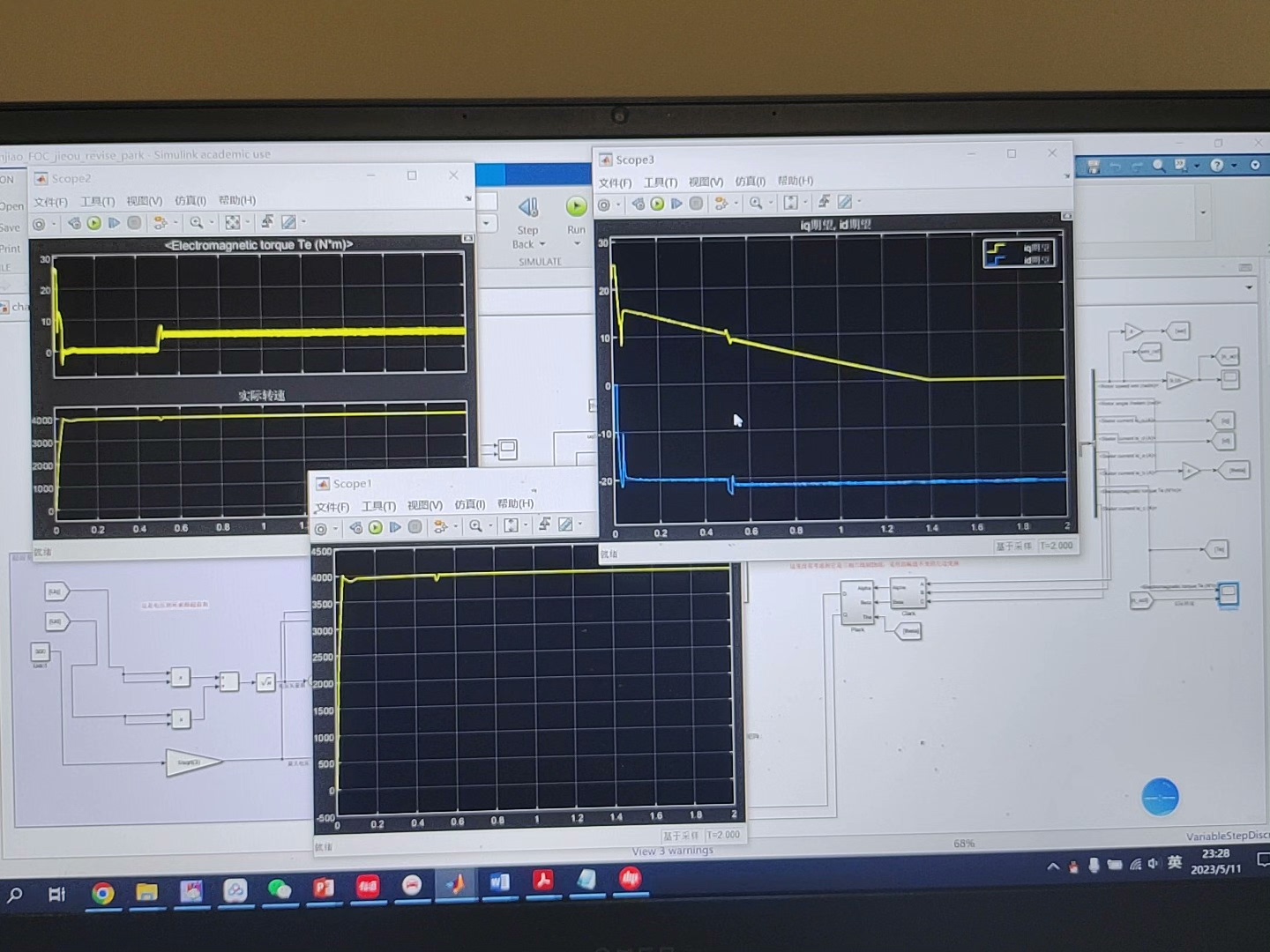
(2)电机期望的d轴和q轴电流曲线图,由图可以看出变化范围较好。
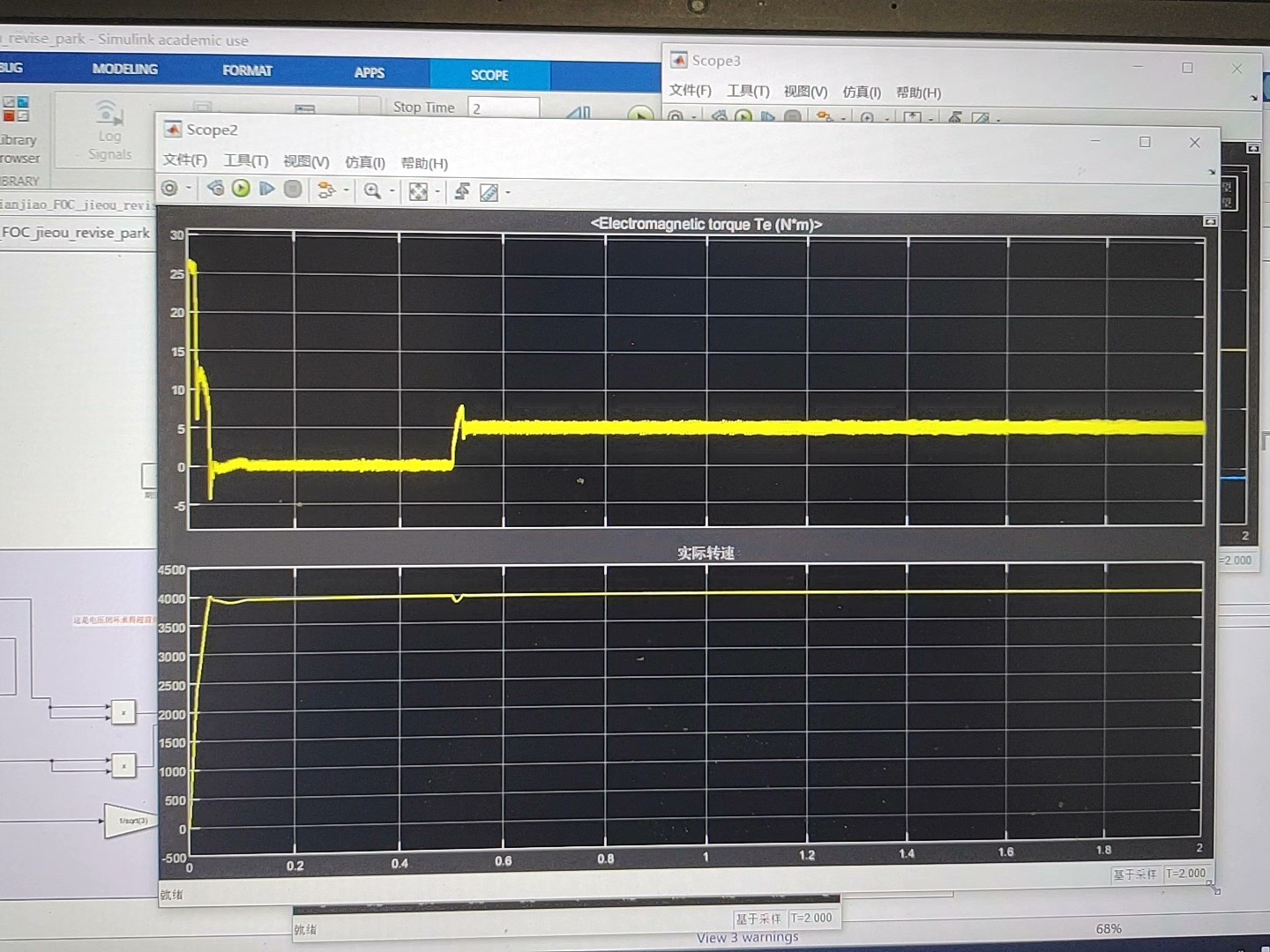
(3)由图可以看出,电机在0.04s左右电机达到了期望的转速4000r/min,在0.5s时电机突加负载后电机的转速也有良好的响应,能够达到4000r/min,超过2300r/min,弱磁扩速。
各个仿真图见下。
提供PPT讲解和word文档进行讲解,包括超前角弱磁的基本思想,控制框图及原理,仿真结果及分析。
并赠送永磁同步电机双闭环控制SVPWM资料和模型,帮助理解电机控制,见附图。
Matlab/Simulink版本:2021a
提供参考文献资料
ID:4439718427271192
倒着走的三三
永磁同步电机超前角弱磁控制是一种在负载扰动下能够稳定运行的控制方法。本文主要介绍了该控制方法的原理、控制框图以及仿真结果及分析。
-
引言
永磁同步电机由于其高效率、高功率密度和低噪声等特点,被广泛应用于工业和交通领域。在实际应用中,为了满足不同负载条件下的工作要求,需要对电机进行控制。而超前角弱磁控制方法是一种较为成熟的控制策略。 -
原理
永磁同步电机超前角弱磁控制的主要原理是通过电压反馈,得到偏转角度theta,并通过id=iscos(theta)的方式控制弱磁电流。该控制方法由多个闭环系统组成,包括两个电流环、一个电压闭环和一个转速外环。
2.1 电流环
电流环的作用是使电机具有较好的动态性能。当负载转矩发生突变时,电流环可以使系统仍能够较稳定地运行。通过电流环的调节,可以实现电机转速的闭环控制。
2.2 电压闭环
电压闭环的作用是在电机转速超过转折速度时,输出一个负的超前角,从而产生一个反向的去磁电流,并减小交轴电流,使电机稳定运行在弱磁区域。
2.3 转速外环
转速外环控制可以实现无差控制的目的。通过转速外环的调节,可以实现对电机转速的精确控制。
-
实现方法
在永磁同步电机超前角弱磁控制中,电流调节器输出Ud和Uq经过低通滤波后,作为弱磁环节的控制输入量。同时,与逆变器输出的最大电压Umax进行对比,根据二者差值来调节弱磁环的PI调节器,输出超前角度大小。超前角度的大小决定了输出的id和iq的大小。 -
仿真结果及分析
采用MATLAB2021a自带的永磁同步电机参数进行仿真。选择额定转矩为10N.m,电压为300Vdc,最大转矩为14.2N.m,额定转速为2300r/min。通过仿真结果可以看出,在给定一个期望转速为4000r/min的情况下,电机能够稳定地运行在弱磁区域,且转速和转矩波动较小。同时,当负载突变时,电机也能够保持较好的响应性能。 -
结论
永磁同步电机超前角弱磁控制是一种在负载扰动下能够稳定运行的控制方法。通过电流环、电压闭环和转速外环的协同控制,实现了电机的精确控制。通过仿真结果的分析,可以看出该控制方法在不同工况下都能够保持较好的性能。
本文提供了对永磁同步电机超前角弱磁控制的基本思想、控制框图及原理,并通过仿真结果进行了详细分析。希望该文对读者们理解和应用永磁同步电机控制具有一定的参考价值。
【相关代码,程序地址】:http://fansik.cn/718427271192.html


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









