







文章目录
前言
作为汽车电子和工业控制领域的核心通信协议,CAN(控制器局域网)和CANFD(灵活数据速率CAN)将长期并存。本文将从技术原理、协议特性到应用场景,深度解析两者的核心差异。
一、基础概念对比
1. CAN总线(Controller Area Network)
由德国博世公司于1986年推出,采用双绞线差分信号传输,具有以下特点:
仲裁机制:
非破坏性逐位仲裁,优先级高的报文优先传输
数据帧长度:
最大8字节
传输速率:
最高1Mbps(典型应用500Kbps)
错误检测:
15位CRC校验+错误帧自动重传
2. CANFD(CAN with Flexible Data-Rate)
2015年由ISO 11898-1标准定义,在传统CAN基础上实现三大突破:
双速率模式:
仲裁段保持1Mbps,数据段提速至8Mbps
数据扩容:
单帧最大支持64字节
增强校验:
17/21位CRC算法+固定填充位
二、核心技术差异

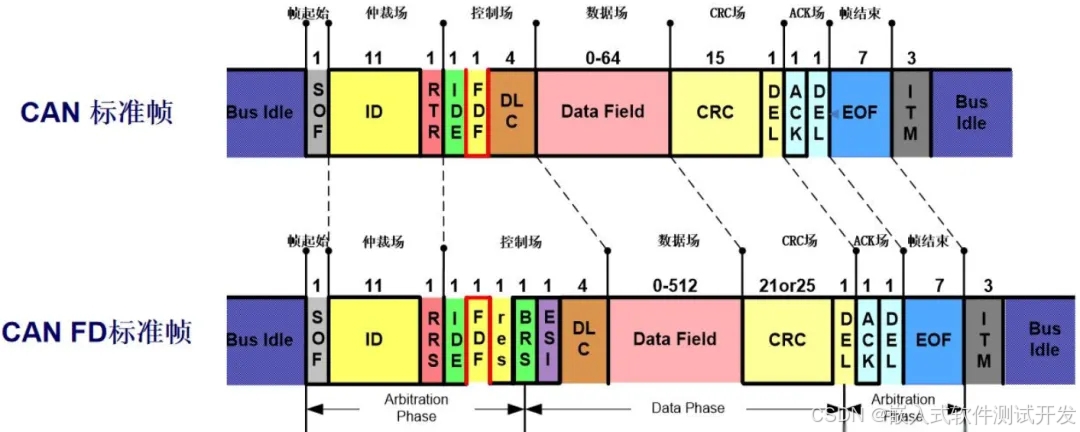
三、帧结构解析

标准帧对比:
扩展帧对比:

1. 控制位升级
FDF位:
标识帧类型(显性=CAN,隐性=CANFD)
BRS位:
触发数据段速率切换(显性=恒定,隐性=加速)
ESI位:
显示节点错误状态(显性=主动错误,隐性=被动错误)
RRS位:
CAN FD取消了对远程帧的支持,取而代之的是使用远程请求替换位(RRS位)来替代传统的远程传输请求位(RTR位)
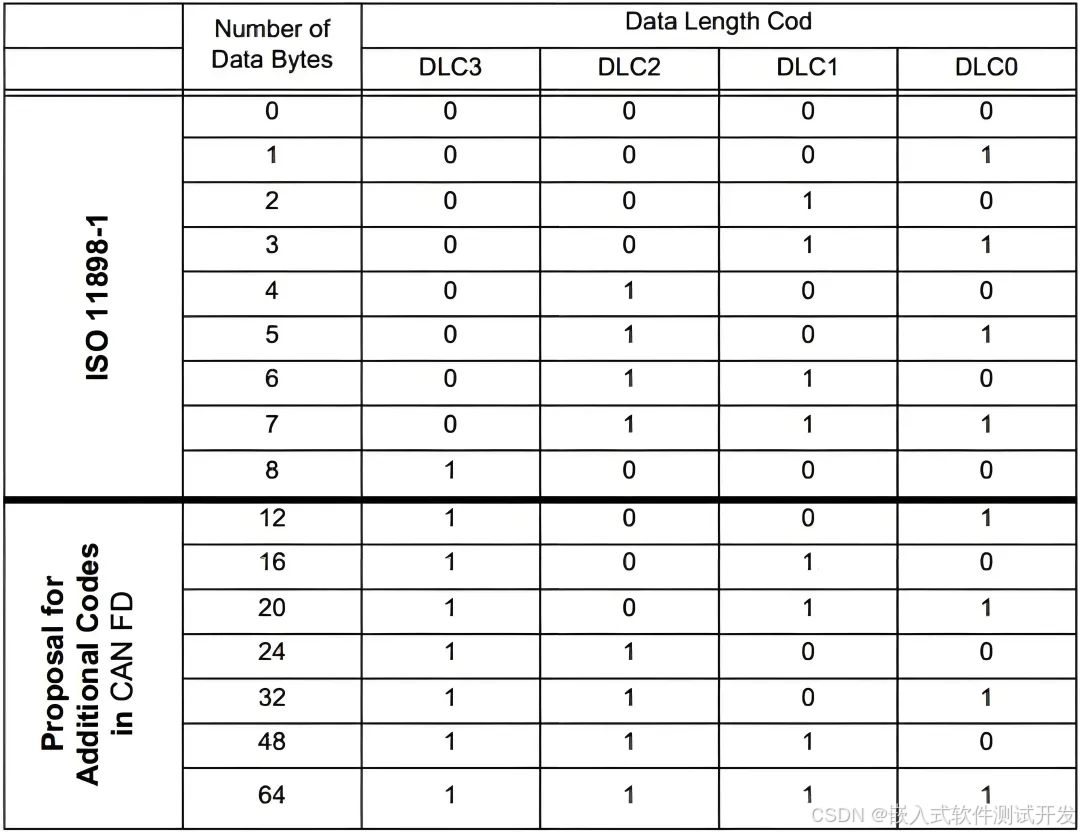
2. 数据段优化
CAN:
数据场固定为0-8字节,DLC(数据长度码)直接对应数据长度。
CAN FD:
数据场扩展至0-64字节,DLC采用非线性编码(如DLC=12对应16字节,DLC=14对应64字节)。
3. CRC校验机制
CAN:
15位CRC,基于位填充前的数据计算,存在错误漏检风险。
CAN FD:
根据数据长度选择17位(≤16字节)或21位(>16字节)CRC。CRC计算包含填充位,并引入固定填充位(FSB)和填充位计数机制,降低错误率。
4. 错误处理
CAN:
检测到CRC错误后,在ACK界定符后立即发送错误帧。
CAN FD:
延迟3个位时间发送错误帧,避免高速率下时序冲突。
四、典型应用场景
1. CAN的适用领域
适用于低数据量场景,如车身控制(车门/车窗/灯光)、底盘系统(ABS/ESP)、动力总成(发动机ECU)等。
2. CANFD的优势场景
用于高带宽需求场景(如ADAS、车载信息娱乐系统),支持更复杂的诊断(如UDS),缩短OTA升级时固件传输的时间(效率提升5-8倍)。
五、性能提升的意义
1. 带宽效率
CAN FD通过可变速率和扩展数据长度,总线负载率从传统CAN的70%降低至30%以下。
2. 可靠性增强
CRC校验覆盖填充位,固定填充位计数机制进一步减少错误漏检。
3. 灵活性
通过BRS和ESI实现动态速率切换与错误状态透明化,提升网络管理能力。
六、未来发展趋势
根据行业调研,2025年新上市车型中CANFD渗透率将超过60%。随着汽车电子向智能化、网联化发展,CAN FD逐渐成为新一代车载网络的核心协议,尤其在L3级以上自动驾驶系统中,其高带宽和低延迟优势愈发显著。



















 967
967

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











