






提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
文章目录
前言
开发环境版本为: Ubuntu 20.04 以及 ros-kinetic
要求 1. 发送 cmd_vel 话题能够控制车子的前后左右移动 2. 利用 move_base 控制小车往一个目的地运动
3. 接收 move_base 的 action 回调,控制小车在两个点的来回
一、gmapping 功能包的使用
了解算法
Gmapping 是 一 个 基 于 2D 激 光 雷 达 使 用 RBPF(Rao-Blackwellized Particle Filters)算法完成二维栅格地图构 建的 SLAM 算法。 优点:gmapping 可以实时构建室内环境地图,在小场景中计 算量少,且地图精度较高,对激光雷达扫描频率要求较低。 缺点:随着环境的增大,构建地图所需的内存和计算量就会 变得巨大,所以 gmapping 不适合大场景构图。一个直观的 感受是,对于 200x200 米的范围,如果栅格分辨率是 5cm, 每个栅格占用一个字节内存,那么每个粒子携带的地图都要 16M 的内存,如果是 100 粒子就是 1.6G 内存。
更改参数
启动算法的 gmapping.launch 文件如下,这里需要根据各自 的情况,对下面文件中注释的部分进行更改,更改内容根据 自己的情况。 该启动的launch文件放在任意一个功能包的launch的文件夹 中都可以,也可以新建一个功能包,因为按照二进制方式安 装 gmapping 算法是没有这个文件的。

安装准备:
首先下载 ubuntu20.04 的镜像: 然后在虚拟机中安装好环境: https://www.cnblogs.com/ubuntuanzhuang/p/ubuntu2004anz huangjiaocheng.html
安装 ros: https://blog.csdn.net/r1141207831/article/details/106327172?
运行 roscore,从打印的信息找到版本信息。根据 ros 版本是 noetic,因此就安装 noetic 版本 的包:
sudo apt install ros-noetic-gazebo-ros-pkgs ros-noetic-gazebo-ros-control sudo apt-get install ros-noetic-turtlebot-* sudo apt install ros-noetic-gmapping
二、实验一步骤
1.启动 Gazebo 并加载机器人、环境模型:
代码如下(示例):
export TURTLEBOT3_MODEL=burger
注:每次新打开这个终端,都需要运行一次上述命令
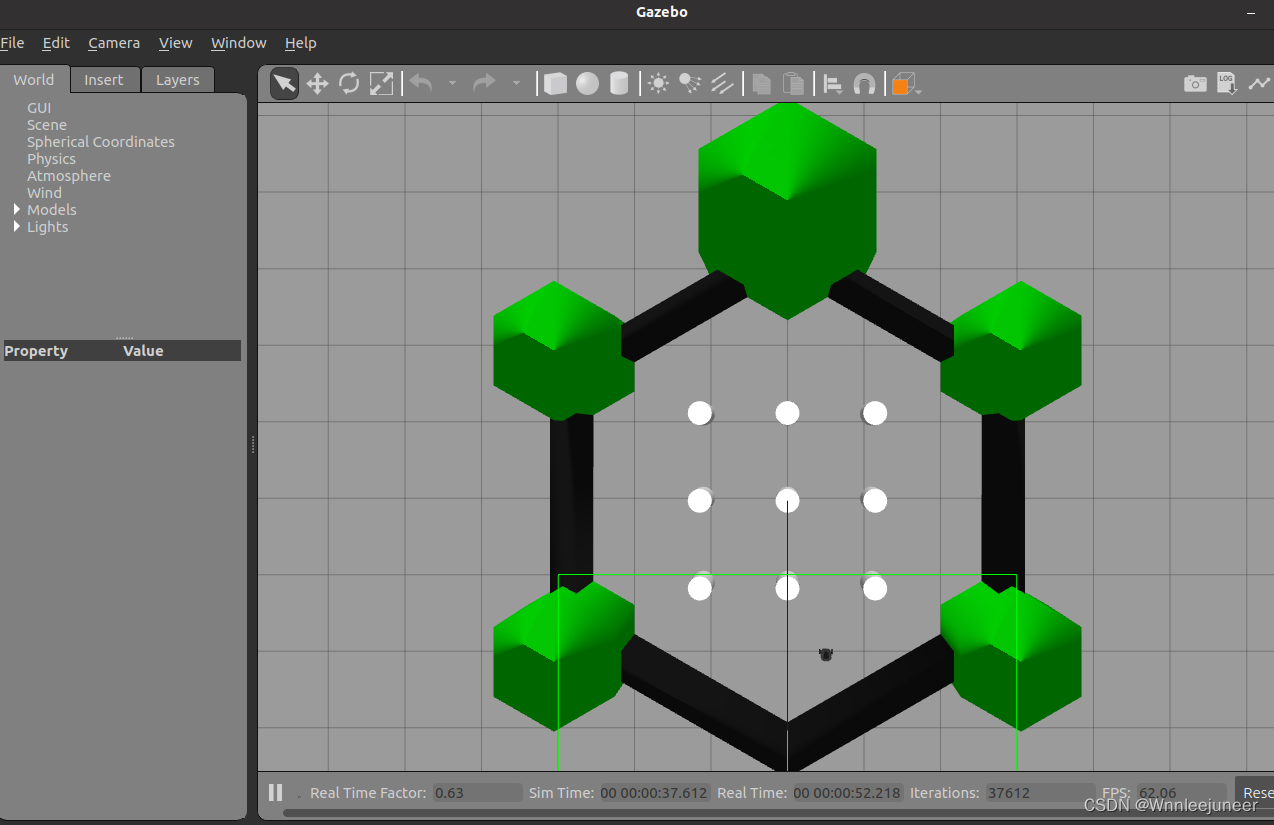
roslaunch turtlebot3_gazebo turtlebot3_world.launch
运行结果:
2.新建终端并启动键盘遥控节点
代码如下(示例):
export TURTLEBOT3_MODEL=burger
roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch --screen
结果:可以很清晰的看到键盘遥控小车的方法,W/X 代表线 速度,A/D 代表角速度。
运行结果: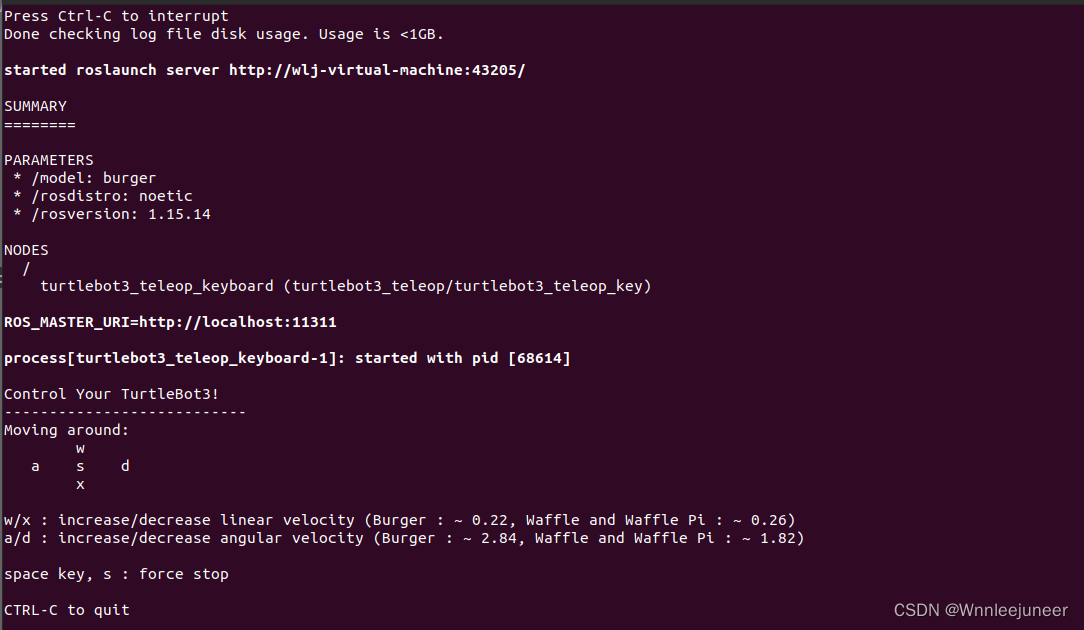
3.新建终端并运行 gmapping(可跳过)
export TURTLEBOT3_MODEL=burger roslaunch turtlebot3_slam turtlebot3_gmapping.launch
用以查看机器人的状态更新
4.新建终端并开启 rviz 观察建图过程
export TURTLEBOT3_MODEL=burger roslaunch turtlebot3_navigation turtlebot3_navigation.launch`
运行结果:
5.使用 RVIZ 来进行小车的自动寻路导航(略)
三、实验二步骤
1.发送 cmd_vel 话题能够控制车子的前后左右移动
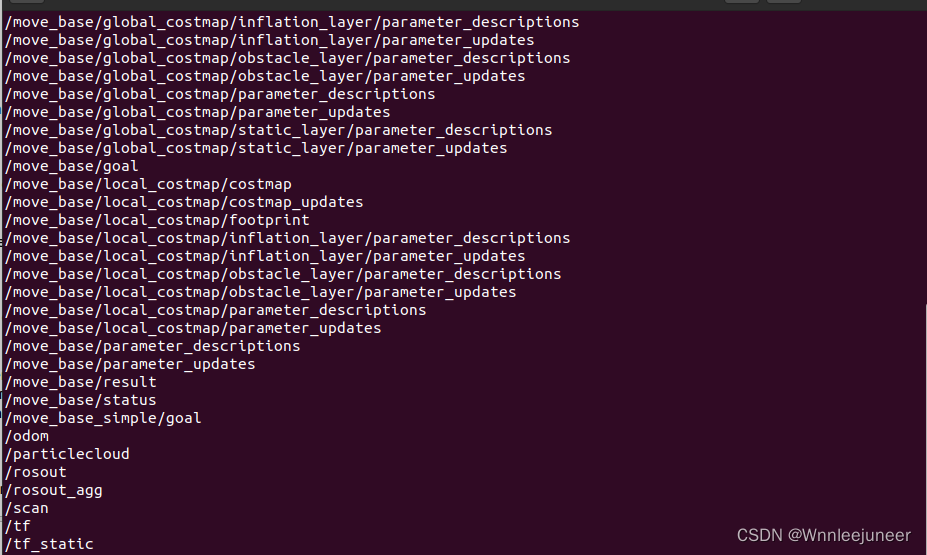
(1)首先查看 ros 节点
rostopic list
运行结果:能够看到 cmd_vel 话题
(2)查看话题类型并发送 cmd_vel 消息控制小车的移动 rostopic pub -r 10 /cmd_vel (按几下 tab 键会自动补全命令) 。
输入命令,在Gazebo 中能够看到小车的移动。(略)
2. 利用 move_base 控制小车往一个目的地运动
(1)让机器人前进一米
rostopic pub /move_base_simple/goal geometry_msgs/PoseStamped \ '{ header: { frame_id: "base_link" }, pose: { position: { x: 1.0, y: 0, z: 0 }, orientation: { x: 0, y: 0, z: 0, w: 1 } } }'
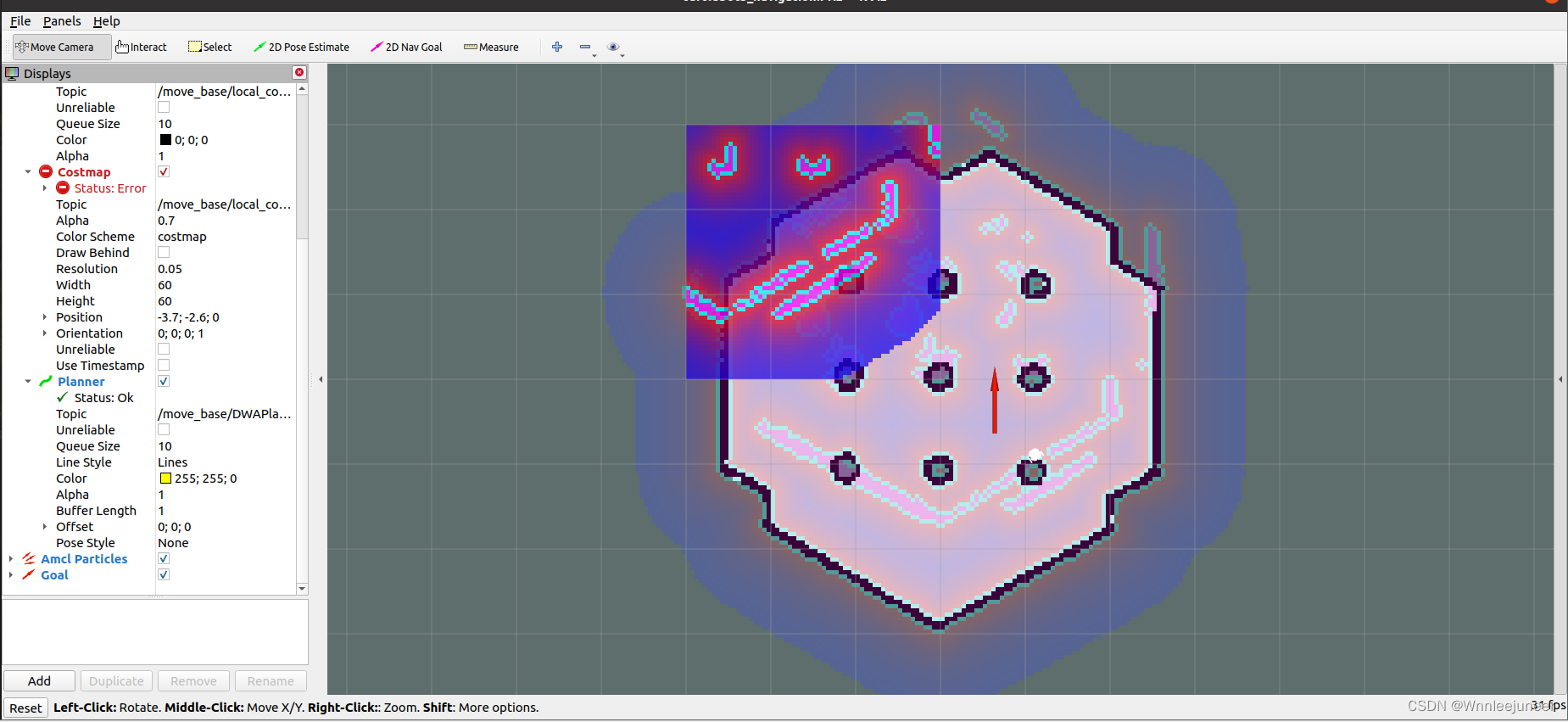
(2)让机器人后退一米,回到原来的位置 rostopic pub /move_base_simple/goal geometry_msgs/PoseStamped \ '{ header: { frame_id: "map" }, pose: { position: { x: 0, y: 0, z: 0 }, orientation: { x: 0, y: 0, z: 0, w: 1 } } }'
在 RVIZ 中可以看到小车在寻路,如下图:
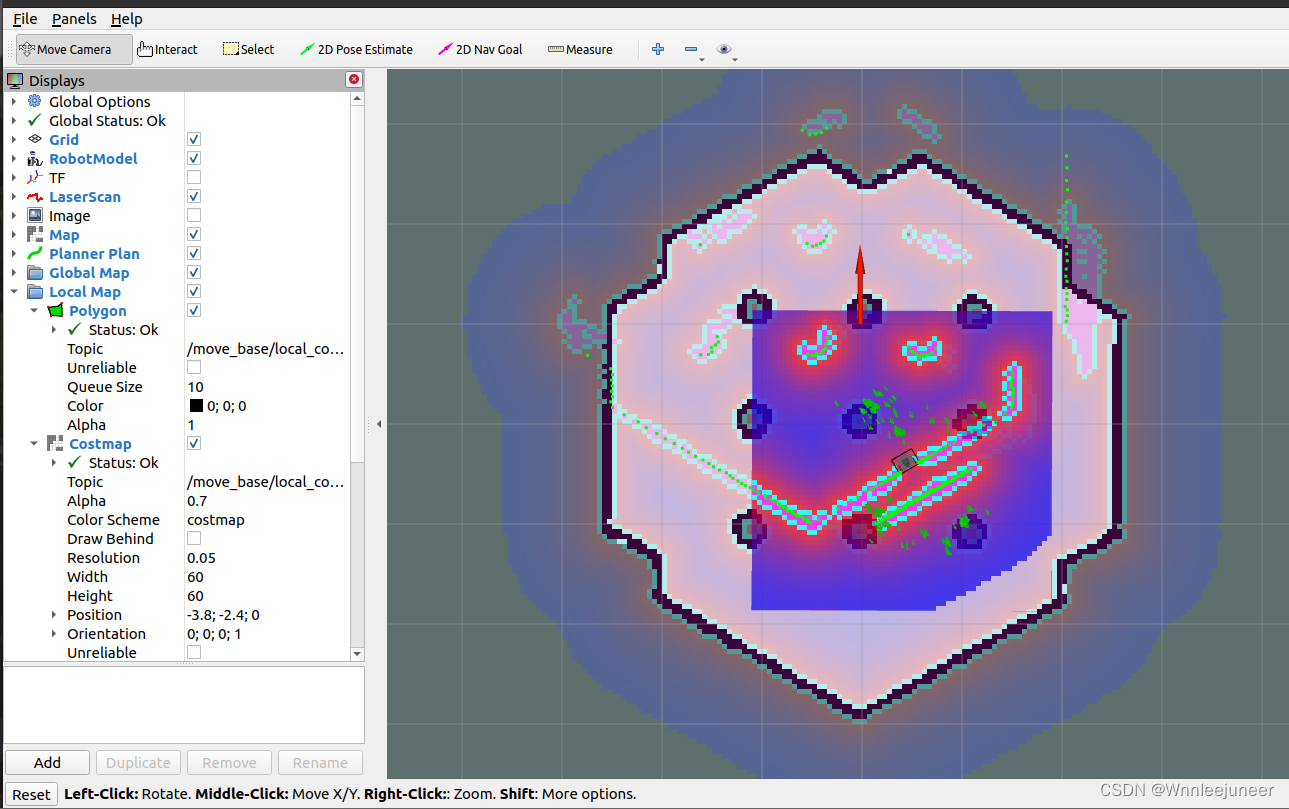
3. 让机器人自动在几个目标点之间来回循环 一个更简单的例子,在机器人前方 1m 处设定目标点
(1)创 建 用 于 发 布 目 标 点 的 package , 包 名 称 为 simple_navigation_goals 命令为:
catkin_create_pkg simple_navigation_goals move_base_msgs actionlib roscpp
(2)代码编写参考: https://blog.csdn.net/heyijia0327/article/details/43565227?loc ationNum=9
(3)然后需要对包的 CMakelists 文件进行修改:
在CMakeList.txt文件最后加上以下两行代码:
`add_executable(send_goal src/send_goal.cpp)
target_link_libraries(send_goal ${catkin_LIBRARIES})`
接着可以进行编译:
$ cd ~/catkin_ws
$ catkin_make
然后运行:
rostopic list | grep move_base/goal
如果有节点出现则成功 最后运行下列命令即可: ./bin/simple_navigation_goals
想要更进一步控制小车移动可以参考下列网址,可以使得小 车按照正方形轨迹移动: https://www.guyuehome.com/270
















 1393
1393











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











