






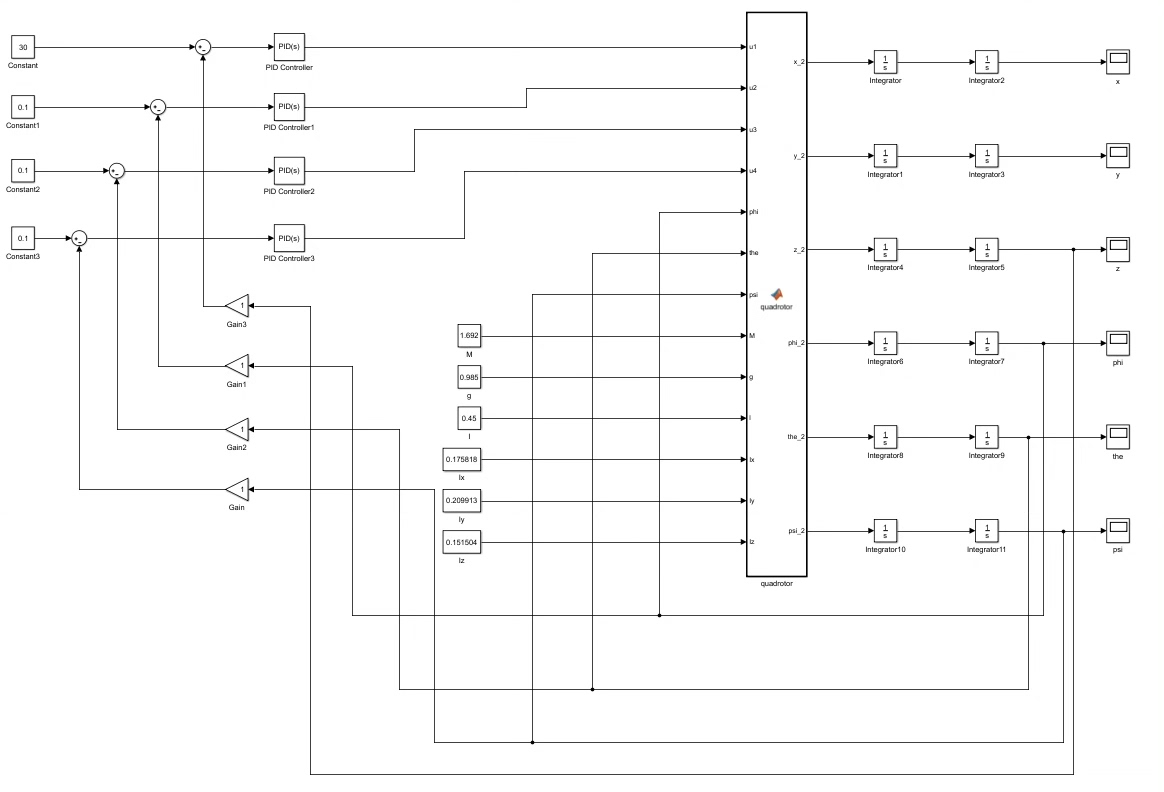
四旋翼无人机,进行simulink建模与仿真,对它的运动学模型和动力学模型进行了必要且详细的研究和分析,运用牛顿-欧拉方程建立了四旋翼的运动学和动力学方程,最后推导出四个旋翼的角速度表达式。
采用了一种简单高效的比例微分串级(PD)控制方式,分别设计了四旋翼无人机的位置控制器和姿态控制器并利用Simulink实现了四旋翼无人机的仿真
ID:7250757466926407
aaccyyyyyy
相关的代码,程序地址如下:http://lanzoup.cn/757466926407.html
















 7632
7632

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









