






Autoware源码安装
建立workspace
mkdir-p autoware.ai/src
cd autoware.ai

这个是下载了一个名为autoware.ai.repos的文件,是为了方便管理多个git库而开发+的Python脚本
wget -O autoware.ai.repos "https://gitlab.com/autowarefoundation/autoware.ai/autoware/raw/1.14.0/autoware.ai.repos?inline=false"
将autoware.ai.repos中的git库文件下载到src文件夹中
vcs import src < autoware.ai.repos

进行初始化(这里使用的是本系列文章的第2章中的小鱼源)
sudo rosdepc init
rosdepc update
进行编译
rosdep install -y --from-paths src --ignore-src --rosdistro $ROS_DISTRO
会稍微比较久,稍等片刻后
AUTOWARE_COMPILE_WITH_CUDA=1 colcon build --cmake-args -DCMAKE_BUILD_TYPE=Release
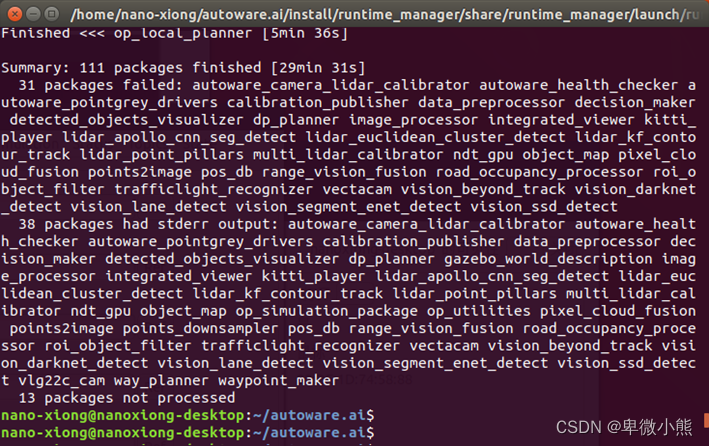
但是在运行过程中可能会出现问题
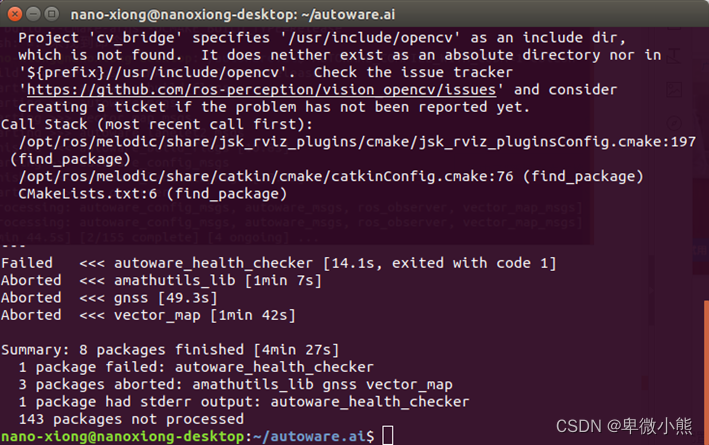
解决方法就是安装对应的ROS包,使用命令
sudo apt-get install ros-melodic-(缺少的包的名字)
但是在部分报错的包一般是不会用到的,可以在指令后面加入参数【–continue-on-error】忽略报错,到在后面的应用时有需要再添加。
不要在不需要的地方浪费太多时间。
AUTOWARE_COMPILE_WITH_CUDA=1 colcon build --cmake-args -DCMAKE_BUILD_TYPE=Release --continue-on-error
等待时间也是比较久
在此过程中,累计死机一次,卡死两次,nano主机的算力孱弱,要有耐心
建议在编译命令后面添加参数【-j 2】只使用CPU的两核进行编译。虽然慢点,但也不至于死机。
完成后就可以运行autoware看看是否安装成功
cd autaware.ai/
source install/setup.bash
roslaunch runtime_manager runtime_manager.launch
此时会又启动一个Autoware的终端
Autoware的界面
至此,autoware安装完成。















 1714
1714











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









