






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
非线性滤波算法比较与分析:EKF、EPF、UKF、PF、UPF的精度与效率研究
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能解答你胸中升起的一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
非线性滤波算法比较与分析:EKF、EPF、UKF、PF、UPF的精度与效率研究
一、算法基础与核心思想对比
- 扩展卡尔曼滤波(EKF)
- 原理:通过一阶泰勒展开对非线性系统进行局部线性化,保留标准卡尔曼滤波框架(预测-更新)。
- 适用场景:轻度非线性系统(如机器人定位、电池SOC估计)。
- 优点:计算效率高,实时性强;在参数调整合理时精度可靠。
- 局限性:
- 线性化误差导致强非线性下精度下降;
- 对噪声协方差矩阵敏感,需手动调参。
- 无迹卡尔曼滤波(UKF)
- 原理:基于无迹变换(UT),通过确定性采样sigma点近似非线性分布的高阶矩(均值和协方差)。
- 适用场景:中强度非线性系统(如目标跟踪、飞行器导航)。
- 优点:
- 无需计算雅可比矩阵,避免线性化误差;
- 精度可达三阶泰勒展开,优于EKF。
- 局限性:
- 计算量略高于EKF(但同数量级);
- 极强非线性下仍可能发散。
- 标准粒子滤波(PF)
- 原理:基于蒙特卡洛方法,用带权重的粒子群近似后验概率分布。
- 适用场景:高度非线性、非高斯系统(如复杂环境下的SLAM、故障诊断)。
- 优点:无模型线性化假设,理论上可逼近任意分布。
- 局限性:
- 粒子退化与贫化问题;
- 计算复杂度随维度指数增长。
- 扩展粒子滤波(EPF)
- 改进点:将EKF作为重要性密度函数,更新粒子以融入最新观测信息。
- 优势:
- 缓解粒子退化,提高采样质量;
- 在锂电池SOC估计中,误差降低至2%以内。
- 代价:每个粒子需EKF计算,效率低于PF。
- 无迹粒子滤波(UPF)
- 改进点:结合UKF与PF,利用UKF生成重要性密度函数指导粒子采样。
- 优势:
- 解决PF的粒子退化问题;
- 在动态噪声和非高斯环境下精度优于EKF、UKF。
- 代价:计算复杂度最高,需平衡粒子数与实时性。
二、滤波精度对比分析
| 算法 | 精度优势 | 精度劣势 | 典型应用案例 |
|---|---|---|---|
| EKF | 轻度非线性下效率与精度均衡 | 强非线性下线性化误差显著 | 机器人定位(误差<5%) |
| UKF | 中强度非线性下精度优于EKF(误差降低30%-50%) | 极端非线性下发散风险 | 高空气象目标跟踪(RMSE降低40%) |
| PF | 非高斯、强非线性系统适应性最强 | 粒子数不足时估计偏差大 | 复杂SLAM(精度依赖粒子数) |
| EPF | 通过EKF优化粒子分布,SOC估计误差<2% | 计算量高于PF | 锂电池多工况SOC估计 |
| UPF | 动态噪声下精度最优(SOC误差<1.5%) | 实时性差,需硬件加速 | 车载电池动态工况 |
关键结论:
- 非线性强度决定算法选择:EKF(轻度)→ UKF(中度)→ PF/EPF/UPF(重度)。
- UPF综合最优但代价高:在电池SOC估计中,UPF比EKF精度提升50%以上,但计算时间增加2-3倍。
三、计算效率对比分析
| 算法 | 时间复杂度 | 空间复杂度 | 优化方向 |
|---|---|---|---|
| EKF | O(n²)(n为状态维数) | O(n²) | 并行化、参数自适应 |
| UKF | O(n³)(2n+1个sigma点) | O(n²) | 简化sigma点生成 |
| PF | O(N·n²)(N为粒子数) | O(N·n) | 粒子数自适应 |
| EPF | O(N·n³)(每个粒子需EKF计算) | O(N·n²) | 重要性密度简化 |
| UPF | O(N·n³)(每个粒子需UKF计算) | O(N·n²) | 混合采样策略 |
效率权衡案例:
- 在SINS/GPS/CNS组合导航中,PF精度比EKF高15%,但计算时间增加80%。
- UKF在雷达跟踪中与EKF耗时相当,但精度提升30%。
四、改进方向与前沿研究
-
EKF的优化:
- 变分贝叶斯EKF(VB-EKF):动态估计噪声协方差,提升鲁棒性。
-
PF的改进:
- 重采样策略:遗传算法优化粒子多样性(UGPF算法误差降低60%)。
- 混合模型:Rao-Blackwellized PF降低状态空间维度。
-
UPF的扩展:
- 新息加权自适应UPF:引入噪声协方差在线调整,进一步抑制发散。
五、综合选型建议
| 场景特征 | 推荐算法 | 理由 |
|---|---|---|
| 实时性要求高,轻度非线性 | EKF | 效率最优,调参简单 |
| 中强度非线性,需平衡精度与效率 | UKF | 无需求导,精度可靠 |
| 强非线性、非高斯,离线处理 | PF/EPF | 理论最优,容忍计算延迟 |
| 极端噪声环境,精度优先 | UPF | 抗噪声能力强,支持动态调整 |
📚2 运行结果
主函数代码:
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% 功能说明:ekf,ukf,pf,epf,upf算法的综合比较程序
function main
% 因为本程序涉及太多的随机数,下面让随机数每次都不变
rng(1);
T = 50; %仿真时间步数
R = 1e-5; %测量噪声
% 产生均值为g1/g2,方差为g1/(g2*g2)
g1 = 3; %Gamma 分布参数,用于产生过程噪声
g2 = 2; %Gamma 分布参数,用于产生过程噪声
% 系统初始化
X = zeros(1,T);
Z = zeros(1,T);
processNoise = zeros(T,1);
measureNoise = zeros(T,1);
X(1) = 1; %状态初值
P0 = 3/4;
% EKF 滤波算法
Qekf=10*3/4; %EKF过程噪声方差
Rekf=1e-1; %EKF过程噪声方差
Xekf=zeros(1,T); %滤波状态
Pekf = P0*ones(1,T); %协方差
Tekf=zeros(1,T); %用于记录一个采样周期的算法时间消耗
% UKF 滤波算法
Qukf=2*3/4; %UKF过程噪声方差
Rukf=1e-1; %UKF过程噪声方差
Xukf=zeros(1,T); %滤波状态
Pukf = P0*ones(1,T); %协方差
Tukf=zeros(1,T); %用于记录一个采样周期的算法时间消耗
% 基本粒子滤波器设置
N=200; %粒子数
Xpf=zeros(1,T); %滤波状态
Xpfset=ones(T,N); %粒子集合初始化
Tpf=zeros(1,T); %用于记录一个采样周期的算法时间消耗
% EPF 滤波器设置
Xepf=zeros(1,T); %滤波状态
Xepfset=ones(T,N); %粒子集合初始化
Pepf = P0*ones(T,N); %各个粒子的协方差
Tepf=zeros(1,T); %用于记录一个采样周期的算法时间消耗
% UPF 滤波器设置
Xupf=zeros(1,T); %滤波状态
Xupfset=ones(T,N); %粒子集合初始化
Pupf = P0*ones(T,N); %各个粒子的协方差
Tupf=zeros(1,T); %用于记录一个采样周期的算法时间消耗
% 以下是模拟系统运行
for t=2:T
processNoise(t) = gengamma(g1,g2); %产生过程噪声
measureNoise(t) = sqrt(R)*randn; %产生观测噪声
% 模拟系统状态运行一步
X(t) = ffun(X(t-1),t) +processNoise(t);
% 模拟传感器对系统观测(测量)一次
Z(t) = hfun(X(t),t) + measureNoise(t);
% 调用 EKF 算法
tic
[Xekf(t),Pekf(t)]=ekf(Xekf(t-1),Z(t),Pekf(t-1),t,Qekf,Rekf);
Tekf(t)=toc;
% 调用 UKF 算法
tic
[Xukf(t),Pukf(t)]=ukf(Xukf(t-1),Z(t),Pukf(t-1),Qukf,Rukf,t);
Tukf(t)=toc;
% 调用 PF 算法
tic
[Xpf(t),Xpfset(t,:)]=pf(Xpfset(t-1,:),Z(t),N,t,R,g1,g2);
Tpf(t)=toc;
% 调用 EPF 算法
tic
[Xepf(t),Xepfset(t,:),Pepf(t,:)]=epf(Xepfset(t-1,:),Z(t),t,Pepf(t-1,:),N,R,Qekf,Rekf,g1,g2);
Tepf(t)=toc;
% 调用 UPF 算法
tic
[Xupf(t),Xupfset(t,:),Pupf(t,:)]=upf(Xupfset(t-1,:),Z(t),t,Pupf(t-1,:),N,R,Qukf,Rukf,g1,g2);
Tupf(t)=toc;
end
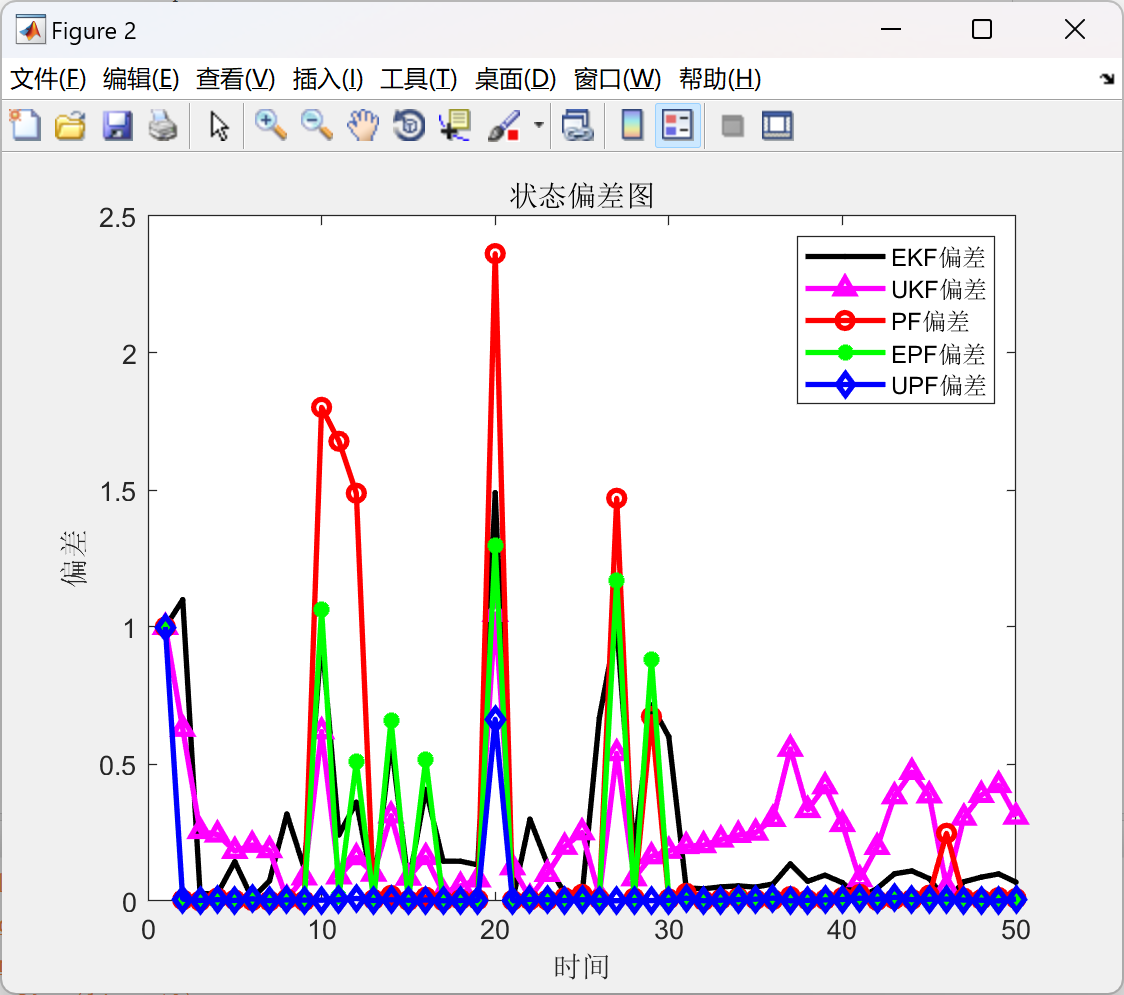
% 数据分析、偏差比较
ErrorEkf=abs(Xekf-X); %ekf 算法估计得到的状态与真实状态之间的偏差
ErrorUkf=abs(Xukf-X); %ukf 算法估计得到的状态与真实状态之间的偏差
ErrorPf=abs(Xpf-X); %pf 算法估计得到的状态与真实状态之间的偏差
ErrorEpf=abs(Xepf-X); %epf 算法估计得到的状态与真实状态之间的偏差
ErrorUpf=abs(Xupf-X); %upf 算法估计得到的状态与真实状态之间的偏差
% 画图
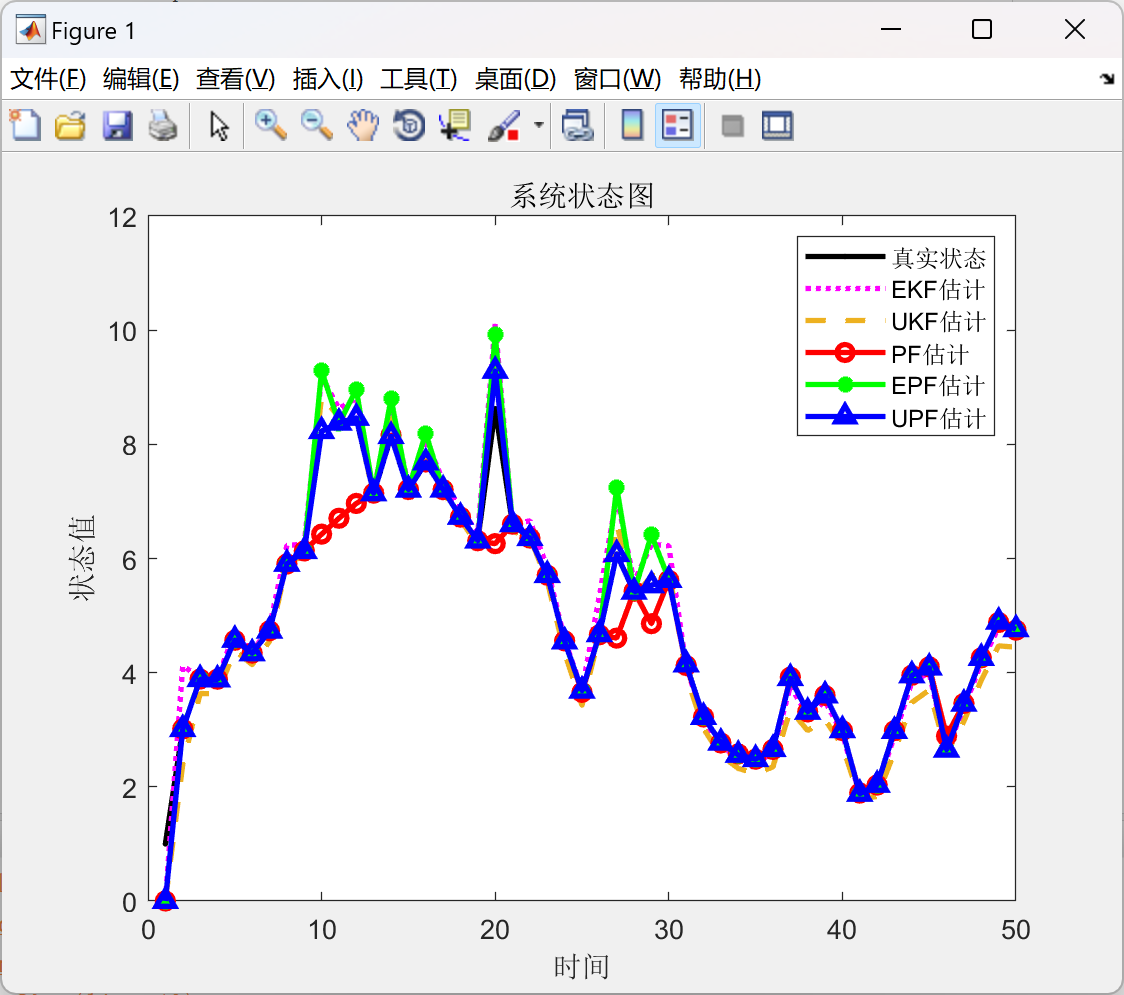
figure
hold on;box on;
p1=plot(1:T,X,'-k.','lineWidth',2);
p2=plot(1:T,Xekf,'m:','lineWidth',2);
p3=plot(1:T,Xukf,'--','lineWidth',2);
p4=plot(1:T,Xpf,'-ro','lineWidth',2);
p5=plot(1:T,Xepf,'-g*','lineWidth',2);
p6=plot(1:T,Xupf,'-b^','lineWidth',2);
legend([p1,p2,p3,p4,p5,p6],'真实状态','EKF估计','UKF估计','PF估计','EPF估计','UPF估计')
xlabel('时间');ylabel('状态值');
title('系统状态图')
% 偏差比较图
figure
hold on;box on;
p1=plot(1:T,ErrorEkf,'-k.','lineWidth',2);
p2=plot(1:T,ErrorUkf,'-m^','lineWidth',2);
p3=plot(1:T,ErrorPf,'-ro','lineWidth',2);
p4=plot(1:T,ErrorEpf,'-g*','lineWidth',2);
p5=plot(1:T,ErrorUpf,'-bd','lineWidth',2);
legend([p1,p2,p3,p4,p5],'EKF偏差','UKF偏差','PF偏差','EPF偏差','UPF偏差')
xlabel('时间');ylabel('偏差');
title('状态偏差图');
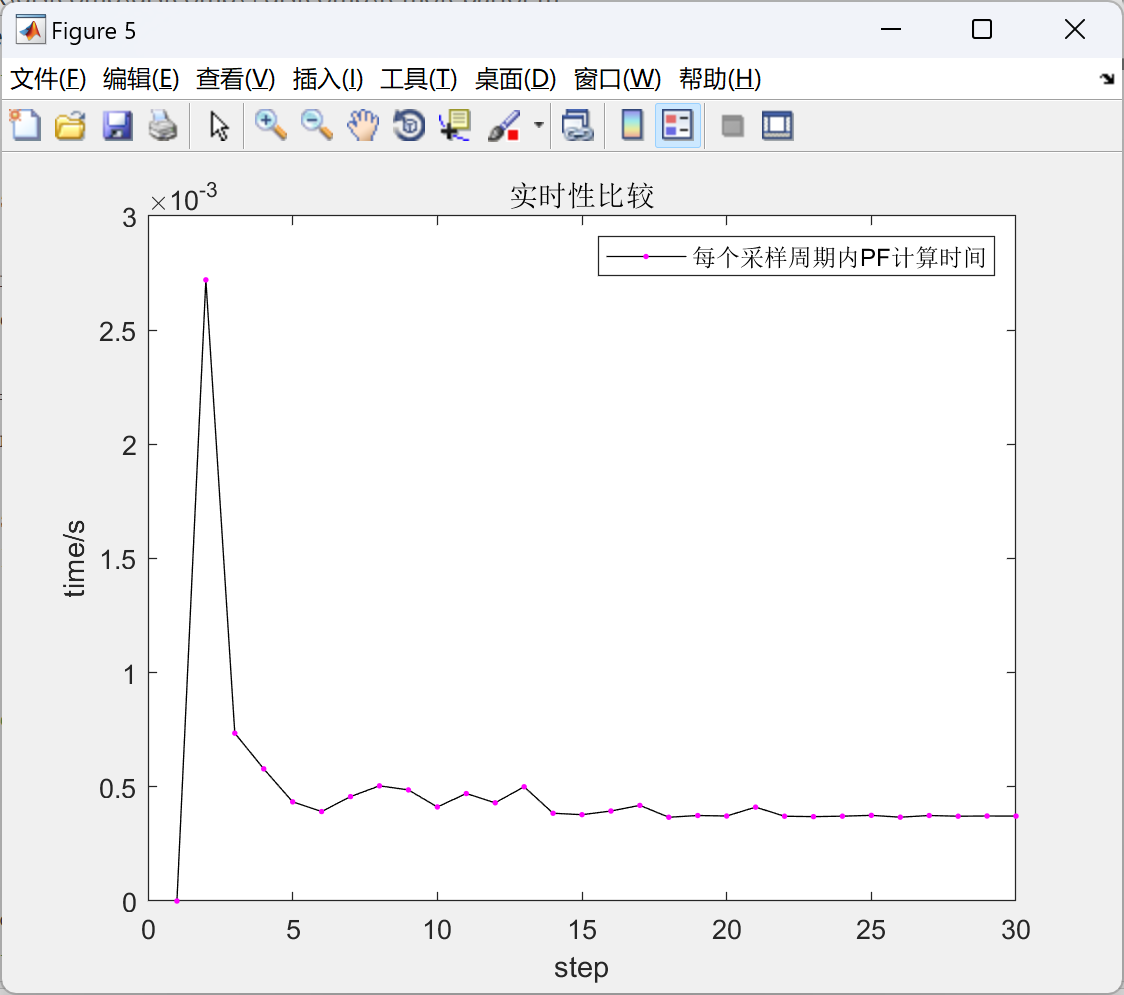
% 算法实时性比较图
figure
hold on;box on;
p1=plot(1:T,Tekf,'-k.','lineWidth',2);
p2=plot(1:T,Tukf,'-m^','lineWidth',2);
p3=plot(1:T,Tpf,'-ro','lineWidth',2);
p4=plot(1:T,Tepf,'-g*','lineWidth',2);
p5=plot(1:T,Tupf,'-bd','lineWidth',2);
legend([p1,p2,p3,p4,p5],'EKF时间','UKF时间','PF时间','EPF时间','UPF时间')
xlabel('时间');ylabel('计算时间');
title('实时性比较');
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。(文章内容仅供参考,具体效果以运行结果为准)
[1]于洪波,王国宏,孙芸,等.一种融合UKF和EKF的粒子滤波状态估计算法[J].系统工程与电子技术, 2013(07):29-33.
[2]赵梅,张三同,朱刚.改进粒子滤波算法在组合导航中的应用[J].中国公路学报, 2007, 20(2):108-112.
[3]席志红,付存利.一种基于UPF的改进粒子滤波算法[J].计算机仿真, 2014, 31(2):5.
🌈4 Matlab代码实现
资料获取,更多粉丝福利,MATLAB|Simulink|Python资源获取


















 2011
2011

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









