







在自动化与智能机器人领域,路径规划是确保机器人能够高效自主行动的核心问题。本文提出了一种基于Q-Learning强化学习算法的路径规划方法,旨在通过自主学习找到最优路径,使机器人能够在复杂环境中避障并到达目标位置。为了验证该算法的有效性,我们在MATLAB环境下进行了仿真,设计了多种环境条件,测试了算法的适应性和收敛性。结果表明,基于Q-Learning的路径规划算法能够有效收敛,规划出最优路径,且在面对不同环境时具有较强的适应能力。本文的研究为智能机器人路径规划提供了一种新的解决方案。
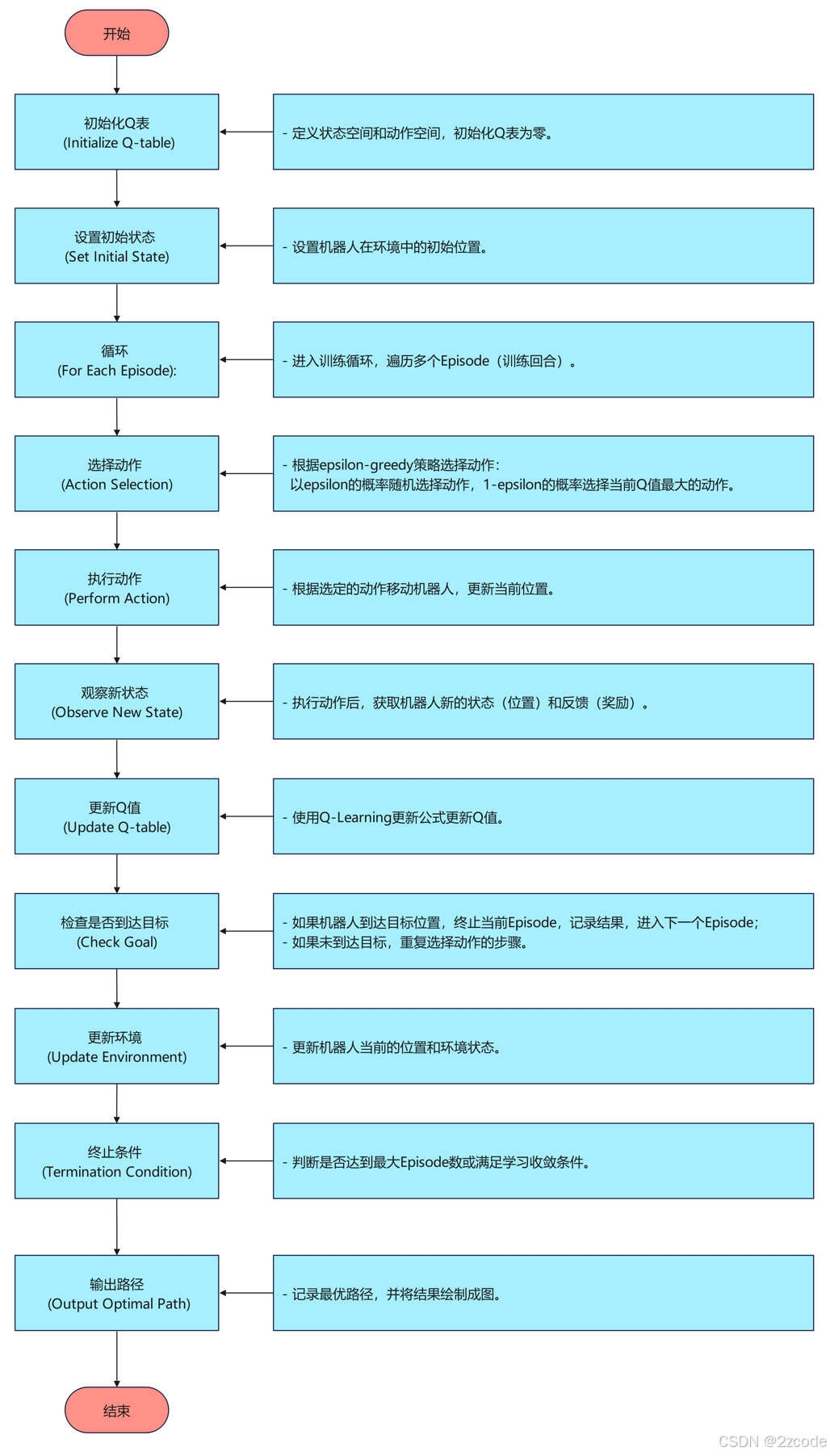
算法流程
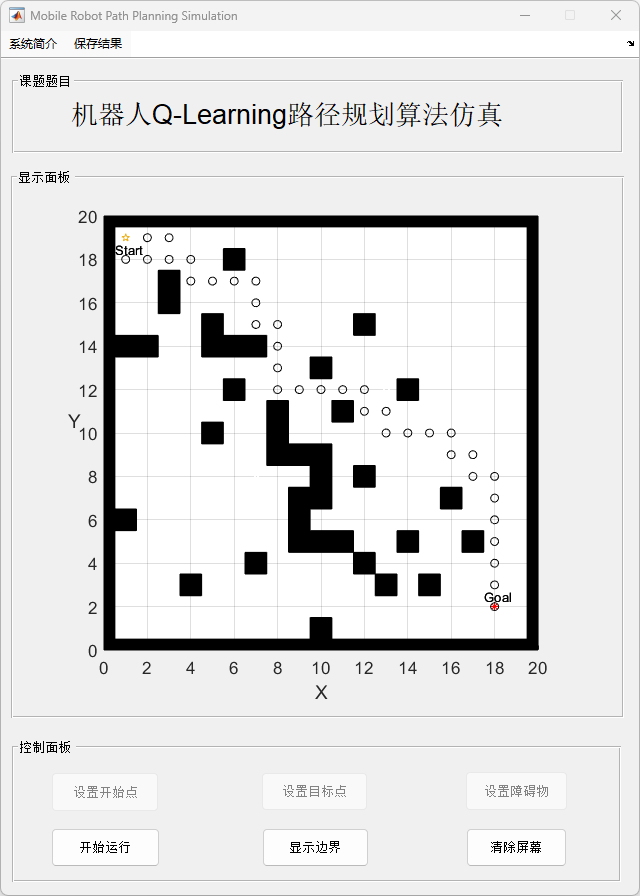
运行效果
运行 PathPlanning.m
(1)主界面
(2)图1(迭代次数 vs. 试验次数)
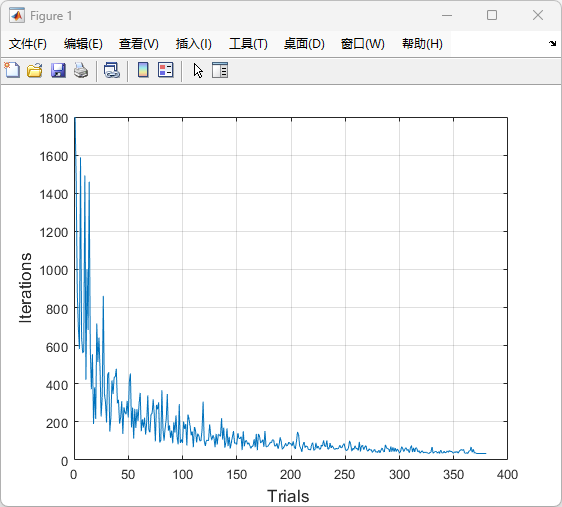
分析:该图显示了每次试验所需的迭代次数。最初,迭代次数较高,随着试验次数的增加,迭代次数逐渐减少。这表明系统或模型随着时间的推移在收敛或学习&
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 366
366

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









