





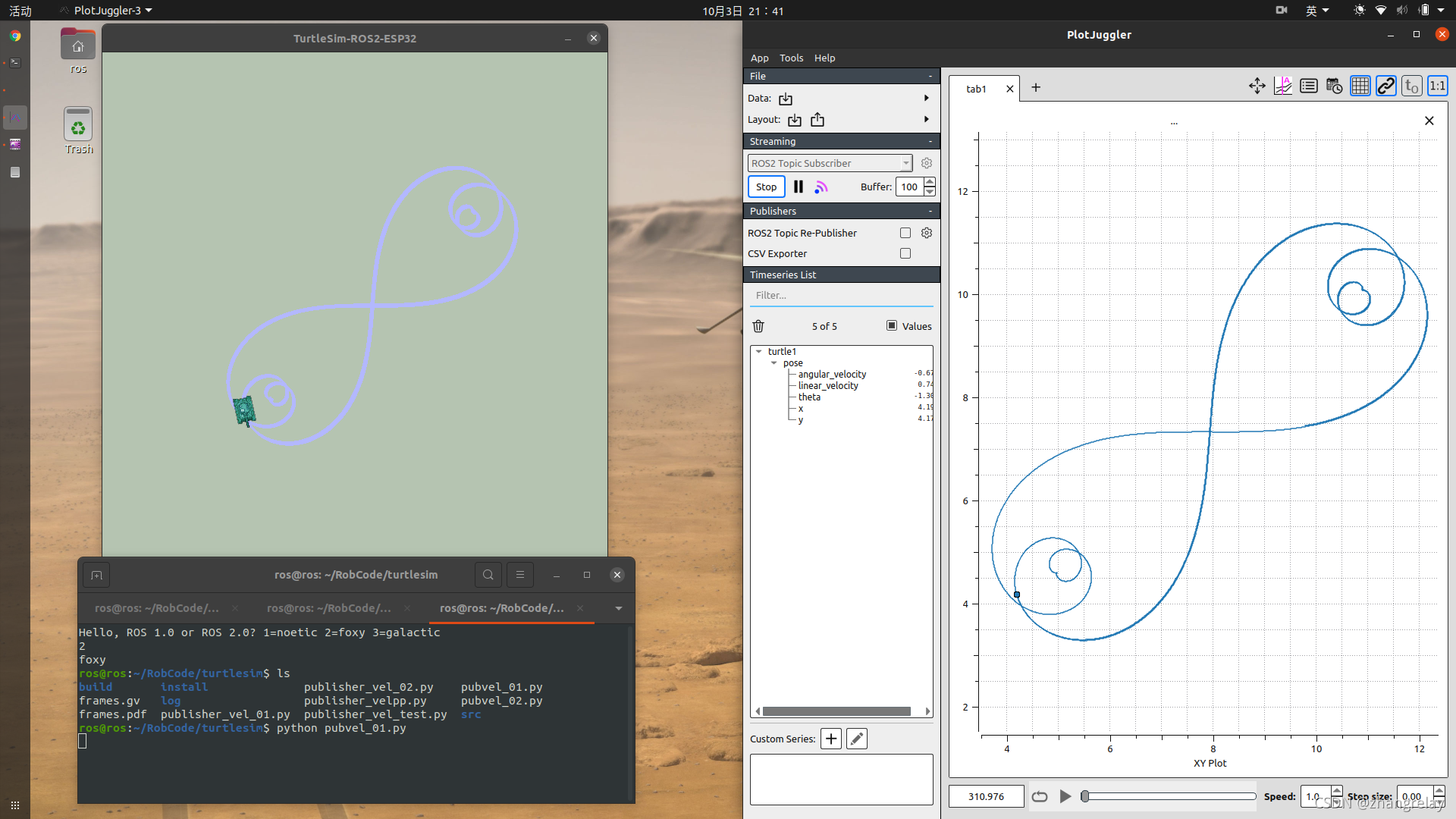
先看效果(turtlesim):
再看 (mobot):
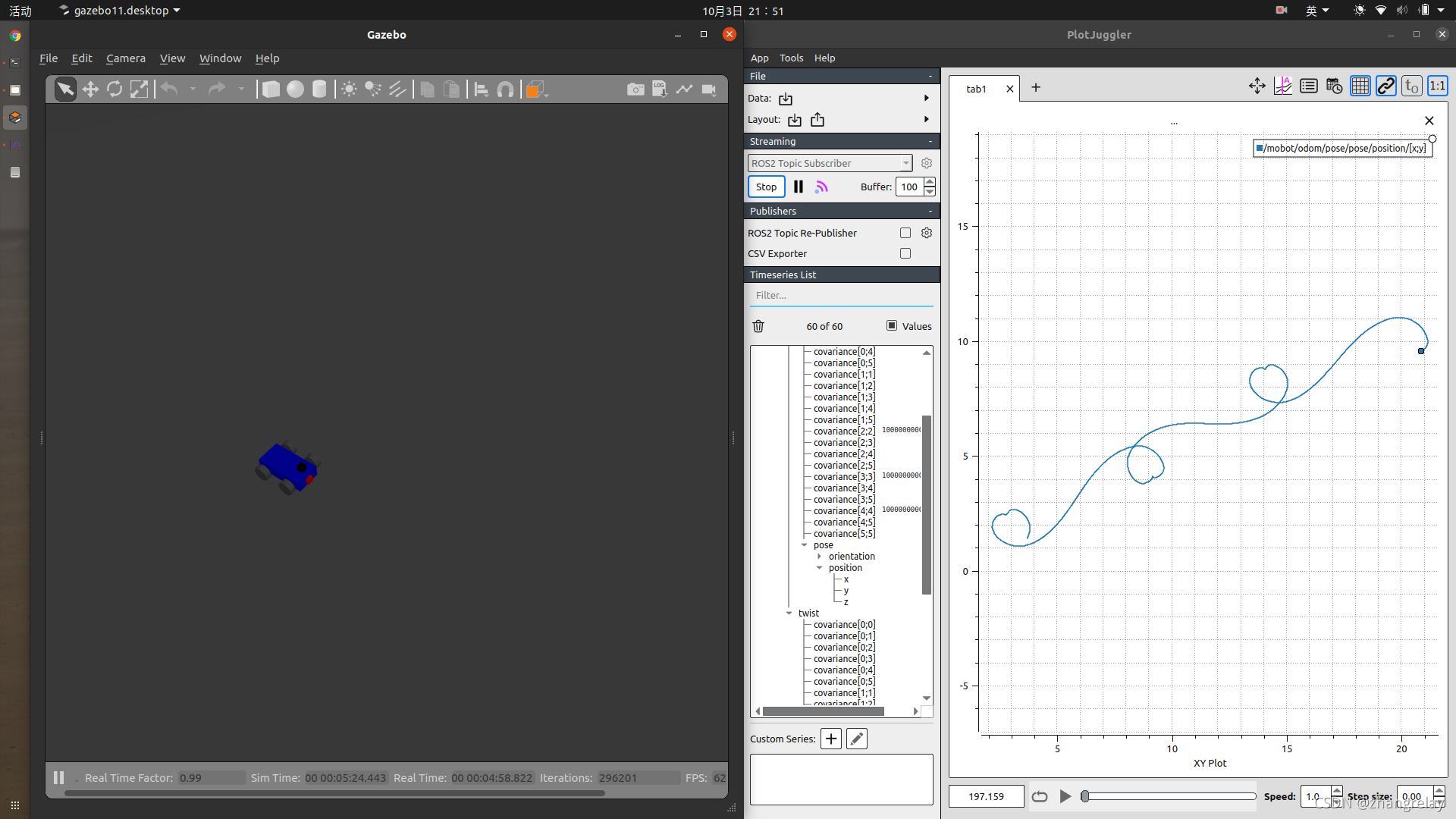
很显然,同样的开环控制指令(速度指令),画出了不同轨迹。心❤形状也有差异。
如何构造相似的轨迹,应用于模型相似的机器人,后续给出闭环控制算法的效果。
安装:
- sudo apt install ros-xxx-plotjuggler
- sudo apt install ros-xxx-plotjuggler-ros
xxx--noetic,foxy,galactic均可。

先看效果(turtlesim):
再看 (mobot):
很显然,同样的开环控制指令(速度指令),画出了不同轨迹。心❤形状也有差异。
如何构造相似的轨迹,应用于模型相似的机器人,后续给出闭环控制算法的效果。
安装:
xxx--noetic,foxy,galactic均可。

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言






























