



 本文档提供系统学习ROS2的全面指南,涵盖基础知识、ROS2应用、机械手控制、导航、SLAM、路径规划、工具使用和ROS2主题等,适合深度学习ROS2技术的开发者和工程师。
本文档提供系统学习ROS2的全面指南,涵盖基础知识、ROS2应用、机械手控制、导航、SLAM、路径规划、工具使用和ROS2主题等,适合深度学习ROS2技术的开发者和工程师。
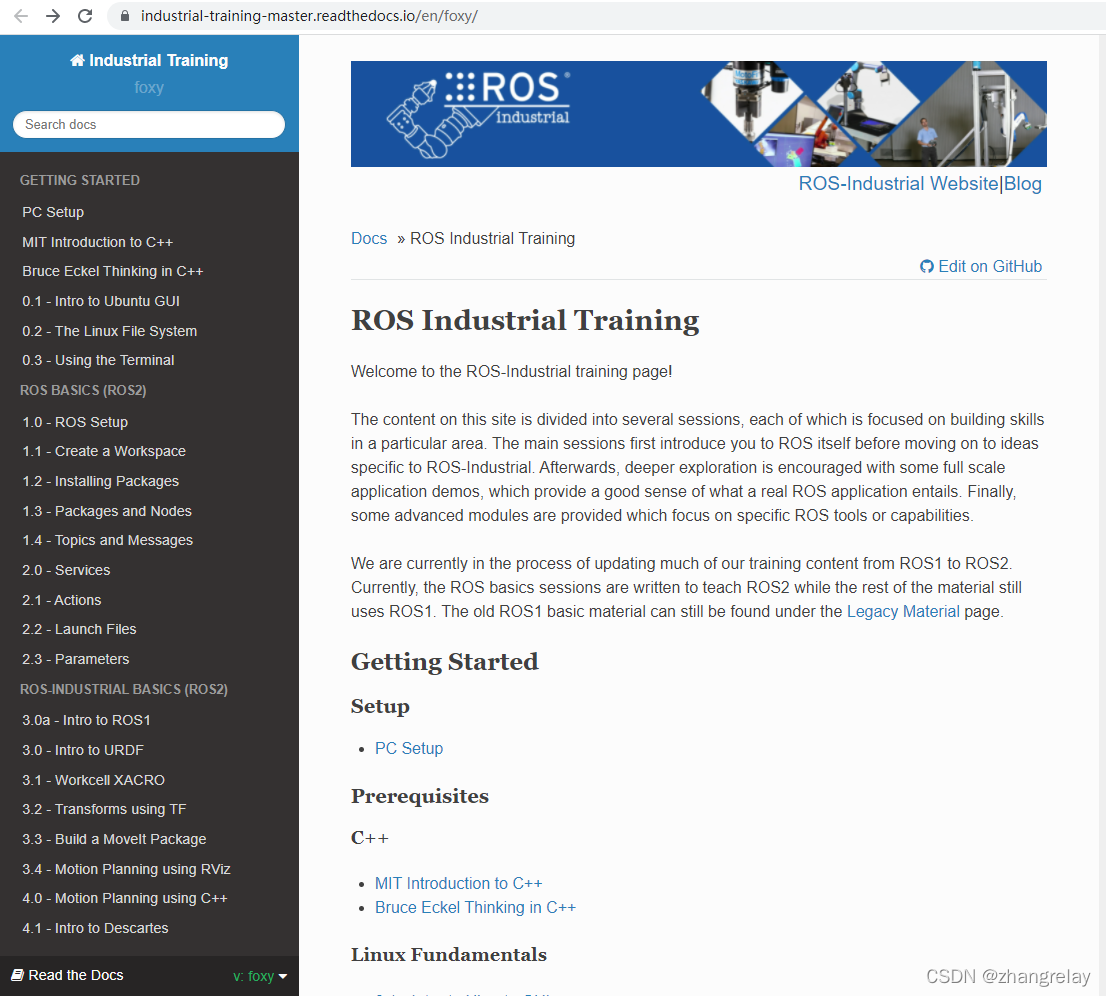
具体资料参考ROS-Industrial官方。
收到不少消息,如何系统学习ROS2,这里只推荐ROS-Industrial。
为了方便使用,文档放在如下:
zhangrelay / ROS2 Industrial · GitCode
教程部分:
更新日期:
7章-总计256页。
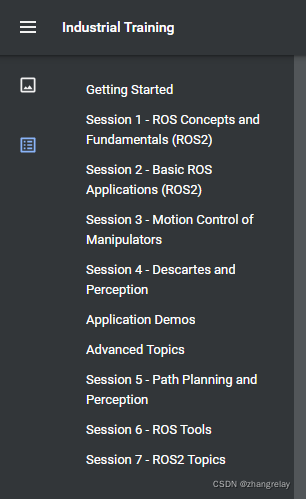
Getting Started
1 Getting Started 3
2 Session 1 - ROS Concepts and Fundamentals (ROS2) 5
3 Session 2 - Basic ROS Applications (ROS2) 7
4 Session 3 - Motion Control of Manipulators 9
5 Session 4 - Descartes and Perception 11
6 Application Demos 13
7 Advanced Topics 15
8 Session 5 - Path Planning and Perception 17
9 Session 6 - ROS Tools 19
10 Session 7 - ROS2 Topics 21
1 入门 3
2 ROS 概念和基础 (ROS2) 5
3 基本 ROS 应用程序 (ROS2) 7
4 机械手的运动控制 9
5 笛卡尔和知觉 11
6 应用程序演示 13
7 高级主题 15
8 路径规划和感知 17
9 ROS 工具 19
10 ROS2 主题 21
练习部分:
Introduction
This repository contains source of training material for ROS 2 Foxy. The topics covered are:
ROS 2 basics
Composed node, publish / subscribe, services, actions, parameters, launch system
Manged nodes, Quality of Service (QoS)
File system
Navigation
SLAM, navigation
Manipulation
Basics of manipulation
包含 ROS 2 Foxy 的培训材料。 涵盖的主题是:
ROS 2 基础知识
组成节点、发布/订阅、服务、行动、参数、启动系统
托管节点、服务质量 (QoS)
文件系统
导航Navigation2
SLAM、导航
操纵MoveIt2
操作基础


















 839
839

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











