






开发课程成本高昂,维护课程同样成本高昂。
当然如果您觉得课程很烂,想吐槽也是随时欢迎的,但是免费实在无力多做维护,并且这是一个2017年开发的免费课程,请您多多包涵,多多理解,多多原谅,对不起。
运行8年了……感谢支持这门课程的朋友们。
有一些课程案例由于差评/投诉等莫名其妙的原因就没了,之后又有一些愿意并想学习的朋友发现之前一些案例想复现很难,也很不满。实在是非常非常抱歉,对不起,但的确是免费课程,一直没有时间和精力去维护,也从未获得过所工作地的相关财力支持,都是自己找志同道合的的朋友一点点测试攒出来的。
CoppeliaSim蓝桥云课版恢复
git clone https://gitcode.com/ZhangRelay1/CoppeliaSim_lanqiaoros.git1 开启终端
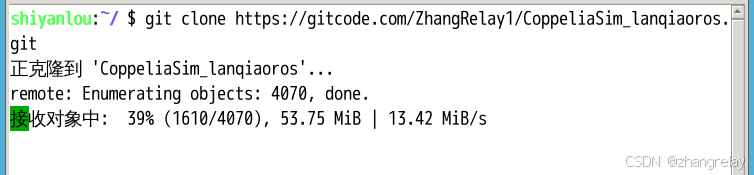
2 克隆项目到本地
git clone https://gitcode.com/ZhangRelay1/CoppeliaSim_lanqiaoros.git
速度很快,国内仓库
 3 启动CoppeliaSim仿真
3 启动CoppeliaSim仿真
./CoppeliaSim_lanqiaoros/coppeliaSim.sh
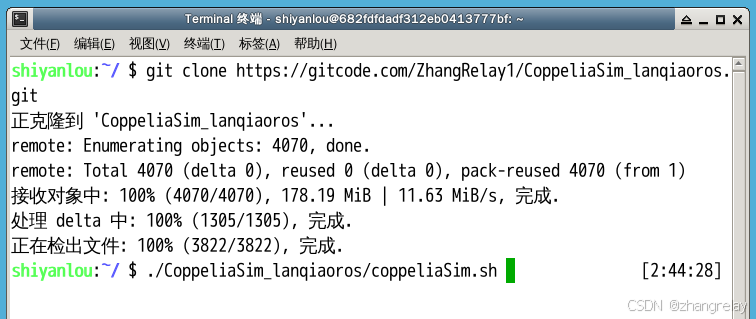
整个过程,网速飞快情况下可在三分钟内完成。

报错。需要到对应文件夹下执行。
shiyanlou:~/ $ cd CoppeliaSim_lanqiaoros
shiyanlou:CoppeliaSim_lanqiaoros/ (main) $ ./coppeliaSim.sh
完美修复,案例测试。
4 案例-巡线
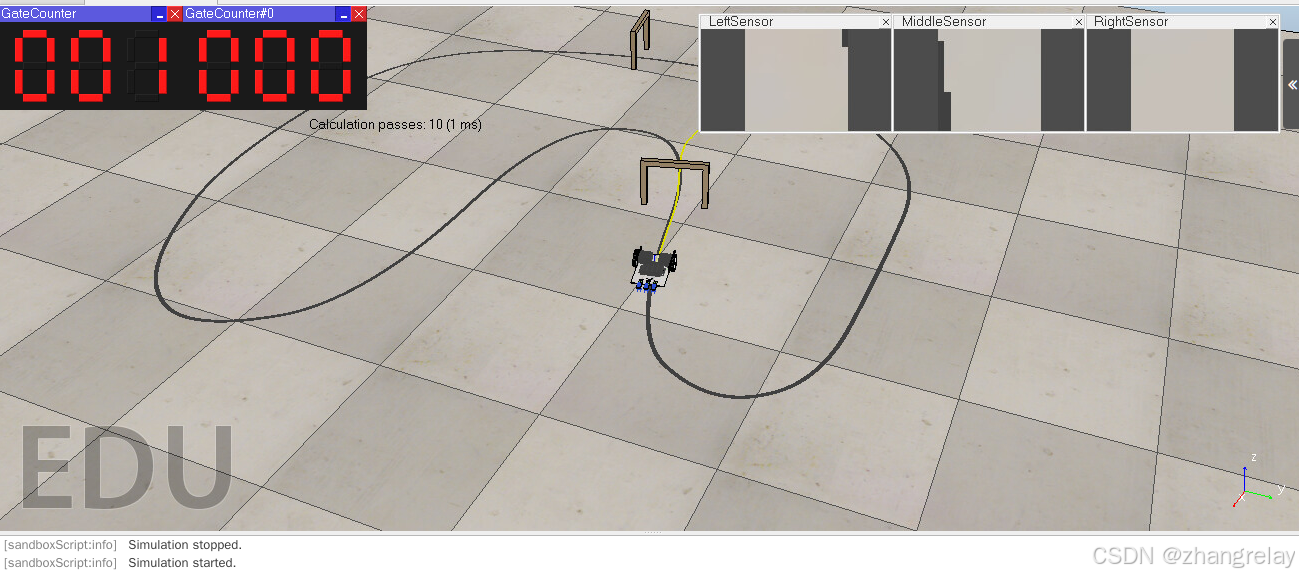
linetracer
5 案例-搬运
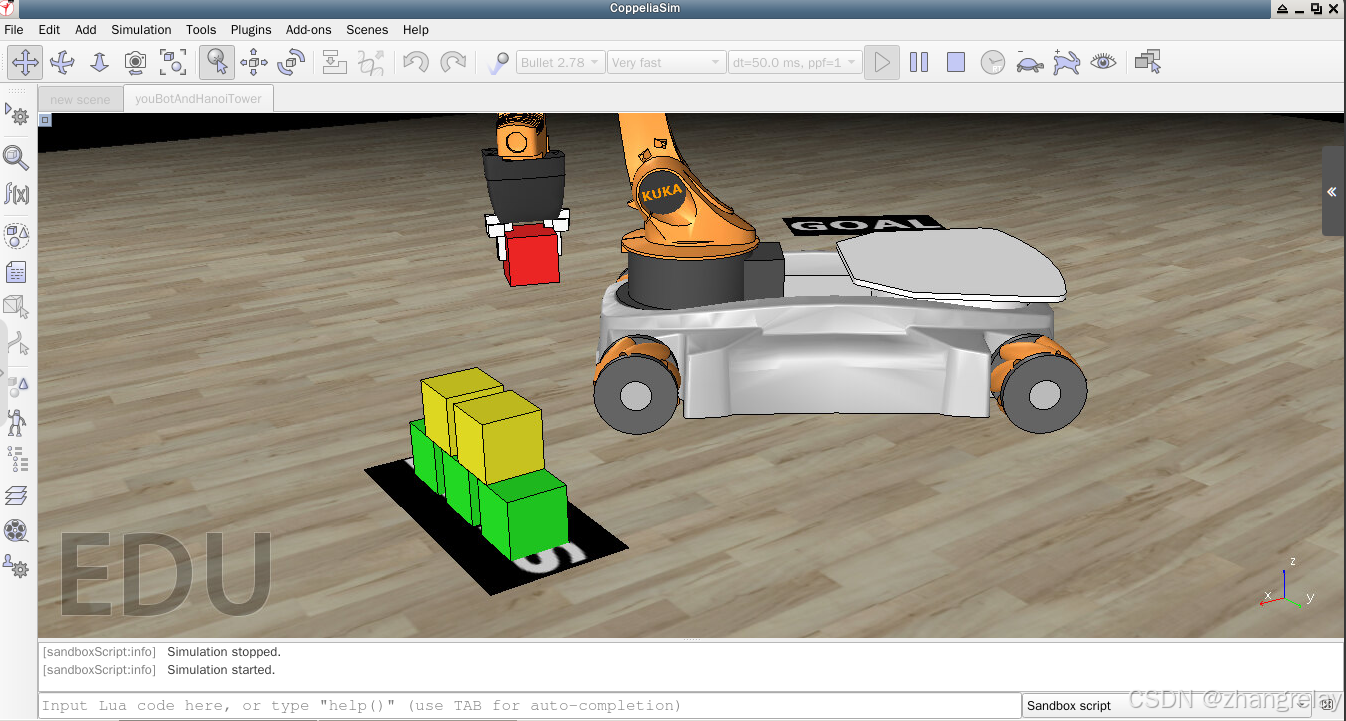 youbot
youbot
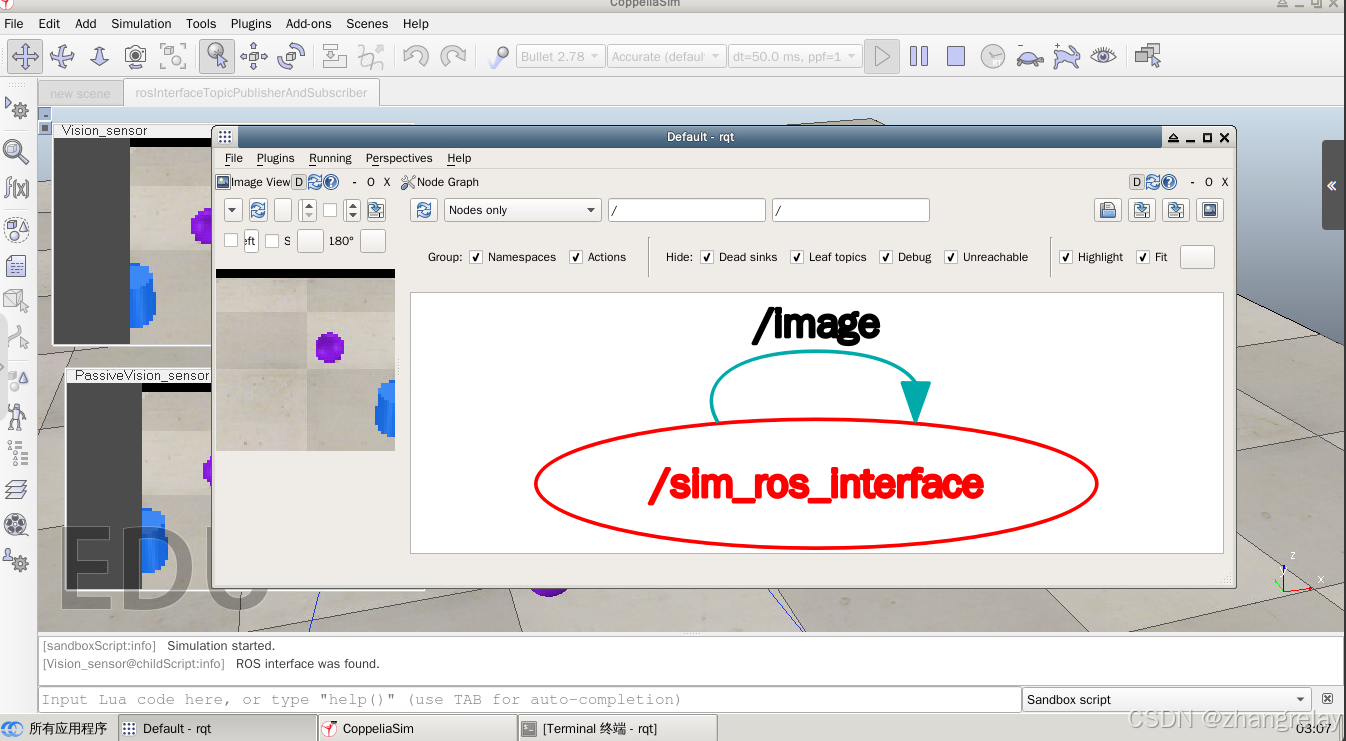
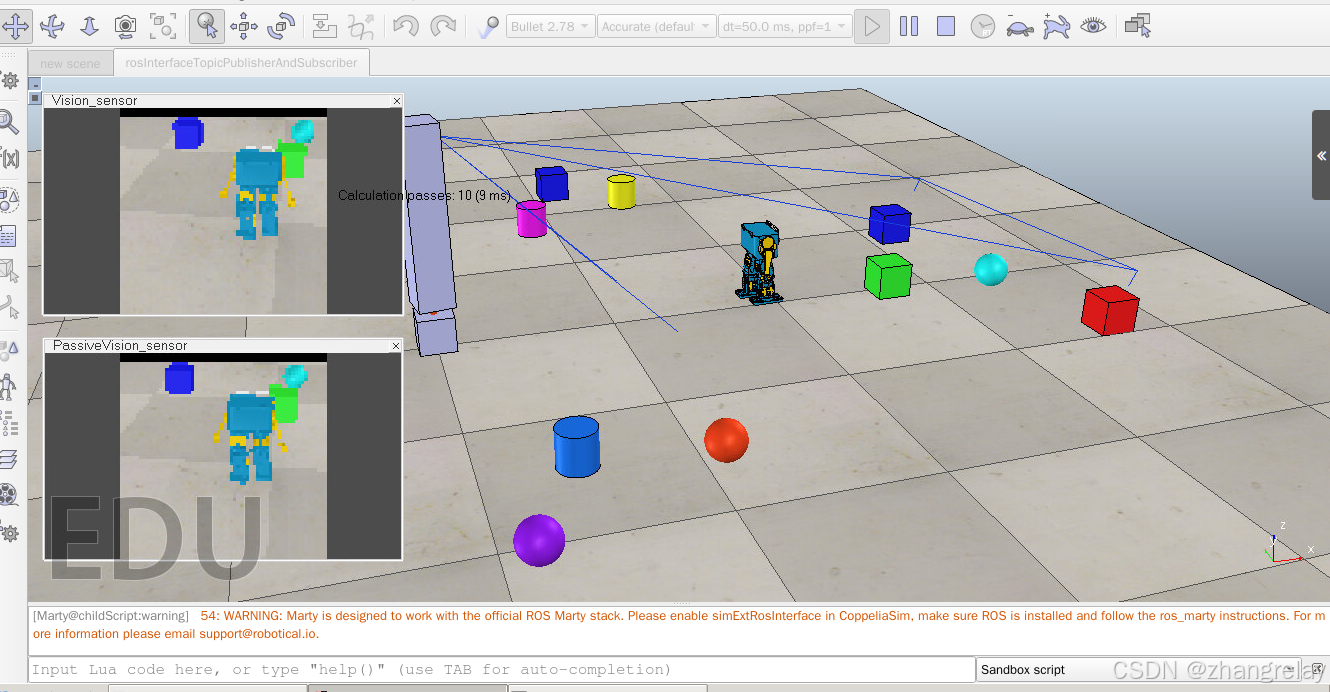
6 案例-ROS
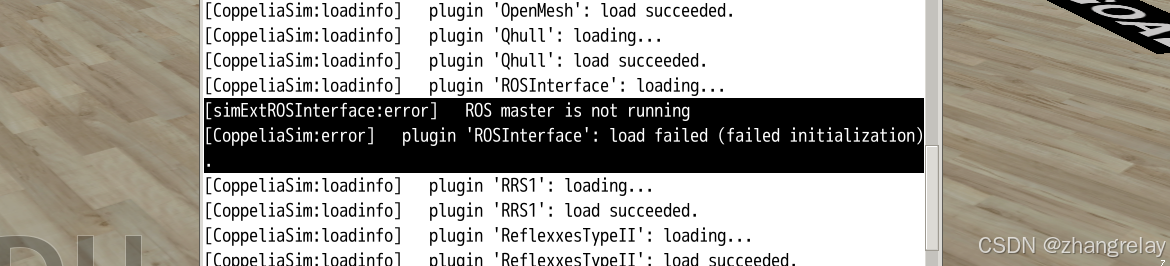
开启roscore,再开启 coppeliaSim。

完美支持。
使用rosInterface案例
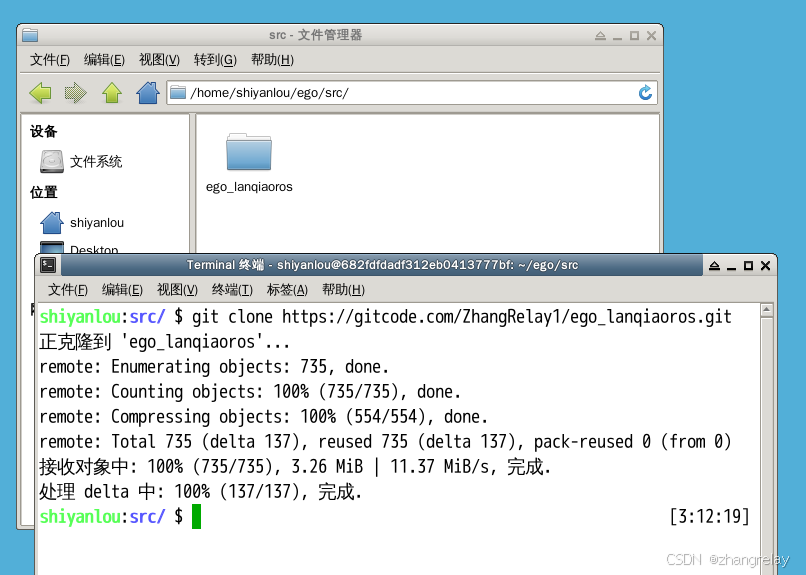
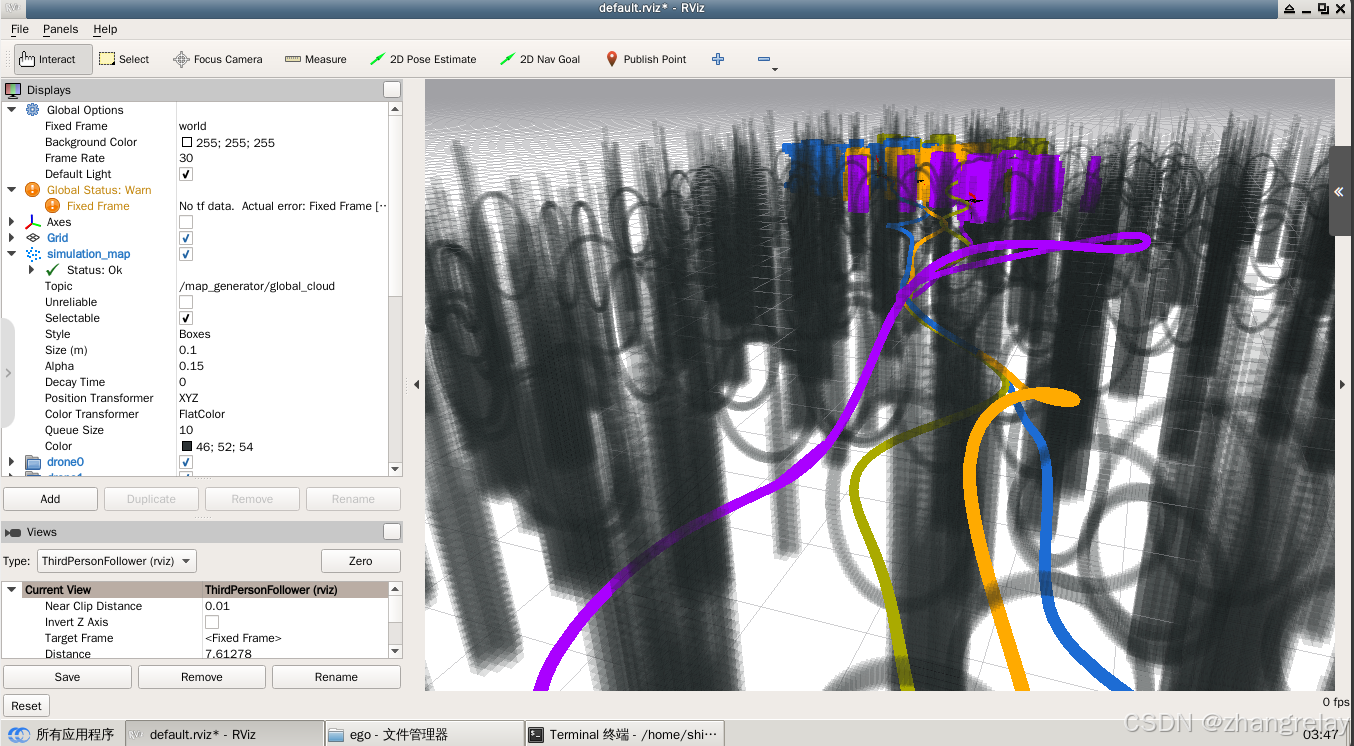
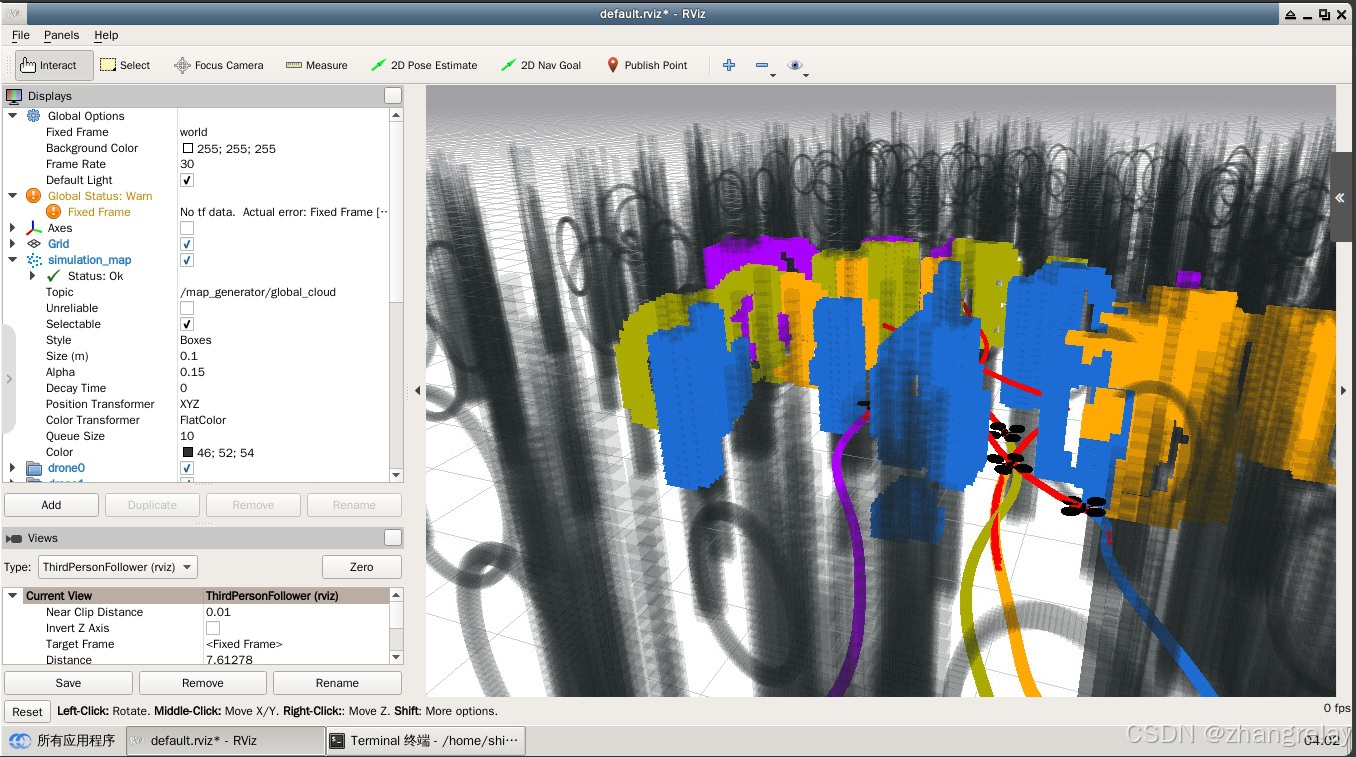
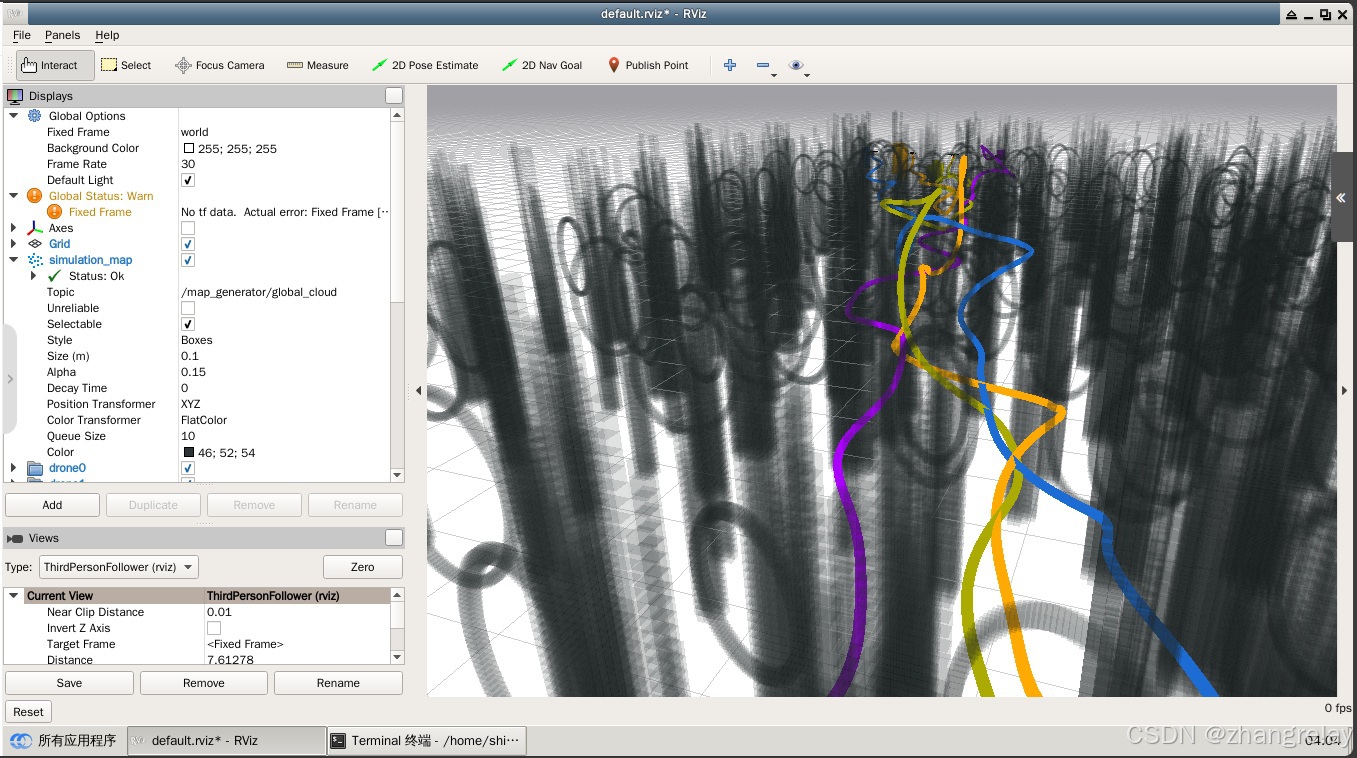
无人机ego案例
1 克隆项目到蓝桥云课中
git clone https://gitcode.com/ZhangRelay1/ego_lanqiaoros.git
sudo apt-get install libarmadillo-dev
2 然后编译:
catkin_make
功能包较大编译时间较长。
报错使用如下命令:
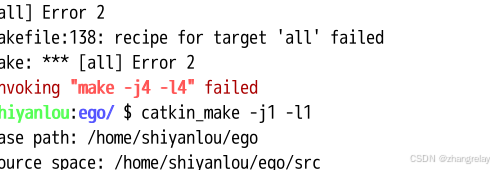
catkin_make -j1 -l1
参数很重要。
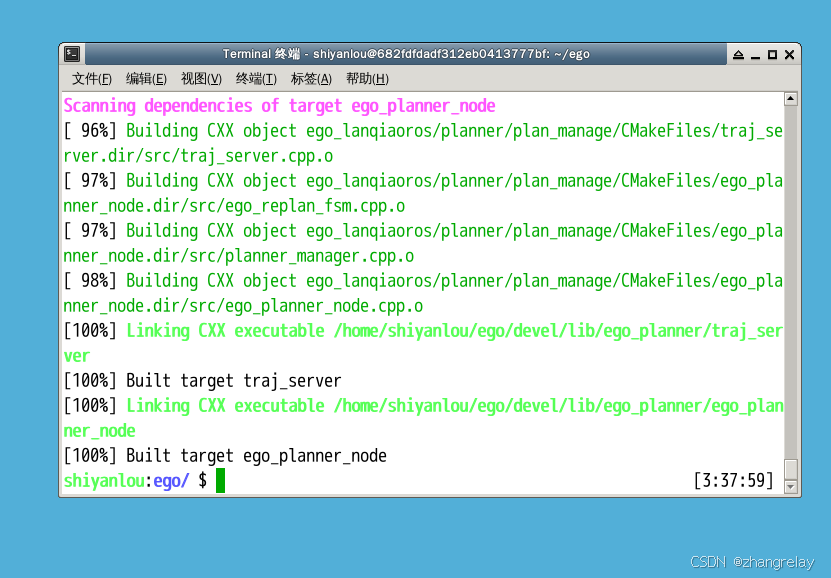
100%完美编译成功。
需要注意,一些库要更新到新版。
sudo apt install libvtk6-dev
sudo apt install ros-kinetic-pcl-conversions
sudo apt install ros-kinetic-cv-bridge
sudo apt install ros-kinetic-pcl-ros3 运行测试
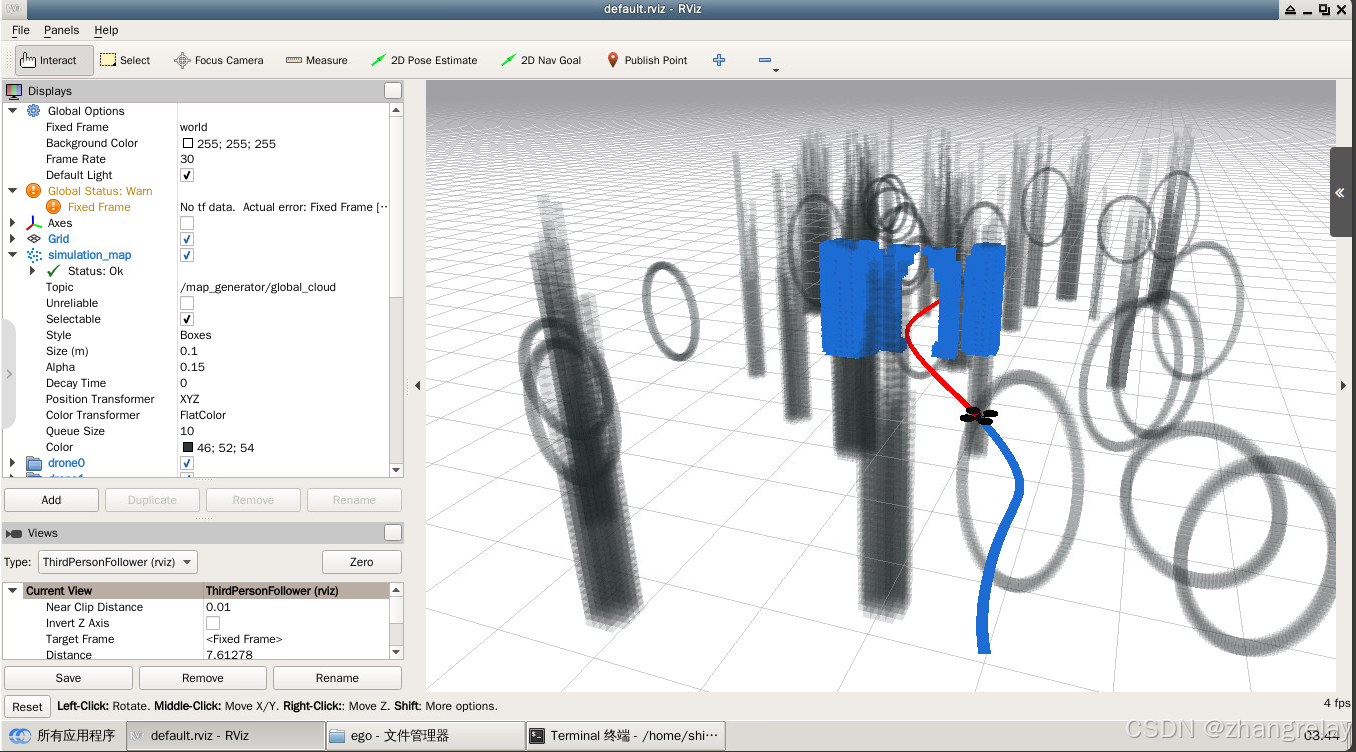
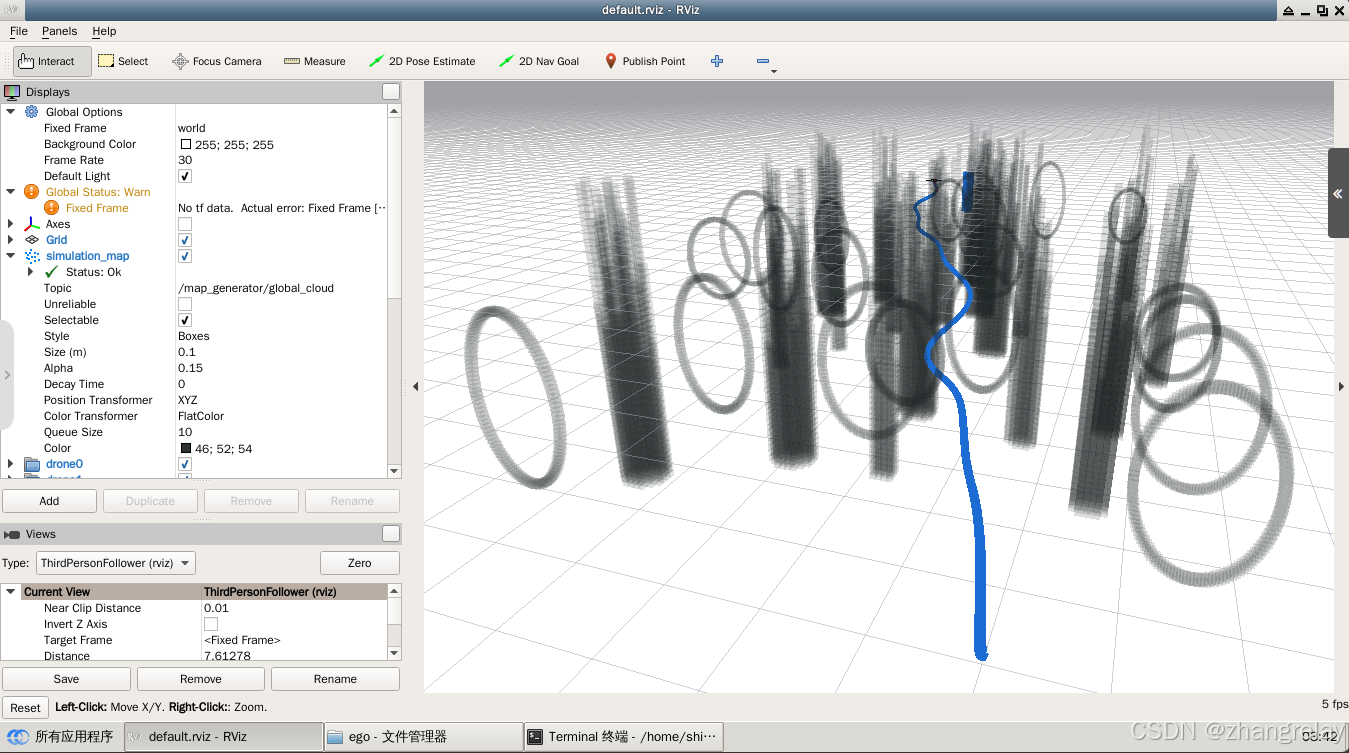
单机
roslaunch ego_planner simple_single.launch
多机
嗯~ o(* ̄▽ ̄*)o,免费,就是卡成幻灯片也是要忍的。
根据您提供的信息,这是一个关于在蓝桥云课平台上恢复和运行CoppeliaSim仿真环境及ROS相关项目的指南。以下是对内容的整理和补充说明:
CoppeliaSim 蓝桥云课版恢复指南
1. 克隆项目
bash
git clone https://gitcode.com/ZhangRelay1/CoppeliaSim_lanqiaoros.git |
- 特点:国内仓库,下载速度快,3分钟内可完成。
2. 启动仿真环境
bash
cd CoppeliaSim_lanqiaoros # 进入克隆的目录 | |
./coppeliaSim.sh # 启动CoppeliaSim |
- 常见问题:需在项目根目录下执行启动脚本,否则会报错。
案例测试
案例1:巡线(Linetracer)
- 直接运行
linetracer相关脚本即可。
案例2:搬运(YouBot)
- 使用
youbot相关功能包测试机械臂搬运场景。
案例3:ROS 集成
- 启动ROS核心:
bashroscore - 再启动CoppeliaSim,确保ROS接口正常通信。
- 测试ROS案例:使用
rosInterface示例验证功能。
无人机Ego Planner项目
1. 克隆项目
bash
git clone https://gitcode.com/ZhangRelay1/ego_lanqiaoros.git |
2. 安装依赖
bash
sudo apt-get install libarmadillo-dev # 线性代数库 | |
sudo apt install libvtk6-dev # VTK图形库 | |
sudo apt install ros-kinetic-pcl-conversions # PCL转换工具 | |
sudo apt install ros-kinetic-cv-bridge # OpenCV桥接 | |
sudo apt install ros-kinetic-pcl-ros # PCL ROS支持 |
3. 编译项目
bash
cd ego_lanqiaoros/catkin_ws | |
catkin_make -j1 -l1 # 限制编译线程避免内存不足 |
- 关键参数:
-j1 -l1防止因资源不足导致编译失败。
4. 运行测试
- 单机模式:
bashroslaunch ego_planner simple_single.launch - 多机模式:需额外配置(未提供具体步骤)。
注意事项
- 免费资源限制:蓝桥云课为免费平台,可能遇到卡顿(如幻灯片般体验),需谅解。
- ROS版本兼容性:项目基于ROS Kinetic,若使用其他版本需调整依赖。
- 编译问题:大型功能包建议使用
-j1逐线程编译,减少报错。
总结
- 适用场景:快速测试CoppeliaSim与ROS的基础功能(巡线、搬运、无人机规划)。
- 局限性:免费环境性能有限,复杂场景可能卡顿。
如有具体报错或深入需求,可进一步提供日志或描述问题细节!
免费课程被差评是许多内容创作者或教育者可能面临的问题,关键在于如何理性应对并转化为改进的动力。以下是系统化的解决方案,结合用户需求和实际场景分析:
一、分析差评原因
- 内容质量问题
- 常见表现:知识点过时、讲解不清晰、案例脱离实际。
- 应对策略:
- 定期更新课程(如每年迭代核心内容)。
- 增加互动环节(如课后作业、答疑直播)提升参与感。
- 引用真实案例(如行业报告、开源项目)增强实用性。
- 用户体验问题
- 常见表现:平台卡顿、界面复杂、缺乏学习指引。
- 应对策略:
- 优化技术细节(如压缩视频、提供文字版讲义)。
- 设计学习路径图(如“新手→进阶→实战”三阶段)。
- 增加用户反馈入口(如课程内嵌调查问卷)。
- 用户预期偏差
- 常见表现:用户误以为免费=高质量,或课程定位模糊。
- 应对策略:
- 明确课程定位:在课程简介中说明适用人群(如“适合零基础入门”)。
- 设置学习门槛:如要求用户完成前置任务(如阅读文档)再观看视频。
- 管理用户预期:在课程开头强调“免费≠完美”,承诺持续改进。
二、应对差评的具体行动
-
及时回应差评
- 公开回复模板:
“感谢您的反馈!我们已记录问题,计划在XX时间更新课程内容/优化技术细节。如需进一步沟通,请私信联系我们。”
- 关键点:避免争辩,聚焦解决方案和时间承诺。
- 公开回复模板:
-
建立差评分类机制
差评类型 处理优先级 具体措施 内容错误 最高 24小时内修正并通知用户 技术问题 高 48小时内提供临时解决方案(如备用下载链接) 体验建议 中 记录并纳入月度改进计划 无理攻击 低 忽略或举报(平台规则允许时) -
转化为改进动力
- 数据化分析:统计差评关键词(如“卡顿”“听不懂”),定位高频问题。
- 用户共创:邀请活跃用户参与课程优化(如投票选择更新内容)。
- 透明化进度:在课程页面发布“改进日志”,展示迭代历史(如“2023年10月:修复视频卡顿问题”)。
三、长期维护策略
- 构建用户信任
- 免费≠低质:通过案例对比(如“免费版提供基础功能,付费版增加实战项目”)区分价值。
- 长期承诺:在课程介绍中声明“免费课程将持续维护至少X年”。
- 降低差评率的设计
- 分层内容:将课程拆分为“免费基础篇”和“付费进阶篇”,减少免费用户的过高期待。
- 预览机制:提供前30%内容免费试看,降低购买决策风险。
- 利用差评数据优化
- 用户画像分析:发现差评用户的共性(如“初学者更易因难度放弃”),针对性优化内容梯度。
- 竞品对比:分析同类免费课程的差评,避免重复犯错。
四、心态调整建议
- 接受差评的必然性
- 免费课程用户群体庞大,需求多样,差评无法完全避免。
- 数据参考:若差评率低于5%(如1000条评价中50条差评),属于正常范围。
- 聚焦核心用户
- 识别“高价值用户”(如积极提问、完成作业者),优先满足其需求。
- 避免因少数差评而过度妥协,导致课程失去特色。
- 建立反馈闭环
- 将差评转化为改进清单,定期公示进度(如“本月优化:增加字幕、修复XX功能”)。
- 通过邮件或站内信通知用户更新,提升用户粘性。
总结
- 短期行动:快速响应差评,分类处理问题,公开改进计划。
- 长期策略:优化内容梯度、降低用户预期、建立反馈闭环。
- 心态建设:将差评视为改进机会,而非否定,专注服务核心用户。
通过系统化应对,差评不仅能转化为课程质量提升的催化剂,还能增强用户对课程持续优化的信心。
如果免费课程缺乏专职售后维护人员,确实会限制部分措施的落地,但通过用户自治、工具替代和流程简化,仍可实现可持续的改进。以下是针对无专职维护人员的优化方案:
一、核心策略:用户自治+自动化工具
1. 引导用户互助解决问题
- 建立用户社区
- 在课程页面嵌入第三方论坛(如Discourse)或即时通讯群(如Telegram/QQ群),鼓励用户自发提问和解答。
- 模板化引导:在课程介绍页提供“常见问题自助指南”,链接至社区中的高赞回答。
- 示例:
“遇到技术问题?先查看社区FAQ,或搜索关键词‘卡顿’‘安装失败’快速定位答案。”
- 设置“问题悬赏”机制
- 允许用户通过“点赞”或“打赏虚拟积分”标记有效回答,激励资深用户贡献知识。
2. 用自动化工具替代人工维护
- 自动收集反馈
- 在课程结尾嵌入表单(如Google Form),自动汇总用户评分和改进建议。
- 关键字段:
- 评分(1-5星)
- 具体问题描述(如“视频第10分钟黑屏”)
- 用户身份(初学者/进阶者,可选填)
- 自动回复模板
- 对差评设置邮件/站内信自动回复,承诺“问题已记录,将在下次更新中修复”(即使实际更新周期较长)。
- 示例:
“感谢您的反馈!您的意见已加入改进清单,预计在2024年Q2版本中优化。”
3. 简化技术维护流程
- 依赖开源工具
- 使用GitHub Issues管理技术问题(需用户自行提交),设置标签(如
bug/enhancement)分类处理。 - 定期(如每月)筛选高频问题,通过脚本批量修复(如替换失效的下载链接)。
- 使用GitHub Issues管理技术问题(需用户自行提交),设置标签(如
- 提供“一键修复”方案
- 针对常见问题(如安装失败),编写自动化脚本(如Bash/Python),用户下载后直接运行即可解决。
- 示例:
bash# 修复CoppeliaSim依赖缺失问题wget https://example.com/fix_coppelia.sh && chmod +x fix_coppelia.sh && ./fix_coppelia.sh
二、低成本维护方案
1. 内容更新:依赖社区贡献
- 开放编辑权限
- 将课程讲义/代码托管在GitHub,允许用户提交Pull Request(PR)修正错误。
- 设置审核规则(如“需2名用户确认有效”),避免恶意修改。
- 众包内容优化
- 发起“改进挑战赛”,鼓励用户提交优化建议(如更好的案例代码),被采纳者获得课程证书或周边奖励。
2. 用户分层管理
- 识别“超级用户”
- 通过活跃度(如发帖数、解答数)筛选出10-20名核心用户,赋予其管理权限(如删除广告帖、置顶优质回答)。
- 激励措施:提供付费课程免费名额或专属徽章。
- 减少新手用户干扰
- 将社区分为“新手区”(仅限提问)和“进阶区”(允许讨论技术细节),降低新手提问的重复率。
三、风险控制与用户预期管理
1. 明确免责声明
- 在课程页面显著位置标注:
“本课程为免费资源,无专职售后支持。遇到问题请优先参考社区FAQ或自行搜索解决方案。”
- 避免过度承诺:不使用“24小时响应”“全程指导”等表述。
2. 降低用户期待
- 分级内容设计
- 将课程拆分为“基础版”(无售后)和“企业版”(付费+售后),通过对比暗示免费版的局限性。
- 示例:
“免费版提供完整视频教程,如需1对1技术支持,可升级至付费版。”
3. 定期“断舍离”
- 淘汰低价值内容
- 每半年删除差评率超30%的章节(如过时案例),在课程更新日志中说明原因。
- 话术:
“为提升学习体验,我们已移除‘XX章节’,相关内容可参考开源替代方案。”
四、成功案例参考
- FreeCodeCamp
- 策略:依赖全球开发者社区维护内容,用户通过GitHub提交PR修正错误。
- 效果:课程错误率降低80%,用户满意度提升。
- Khan Academy
- 策略:提供“练习反馈”工具,用户提交错误答案后,系统自动推荐相似题目巩固知识。
- 效果:减少人工答疑需求,用户独立完成率提高60%。
总结:无专职维护下的可行路径
| 需求 | 替代方案 | 工具/资源 |
|---|---|---|
| 技术问题解答 | 用户社区+自动化脚本 | Discourse论坛 + GitHub Issues |
| 内容更新 | 社区PR+众包挑战赛 | GitHub + 挑战赛公告模板 |
| 用户情绪安抚 | 自动回复+免责声明 | Google Form + 邮件模板 |
| 长期维护成本 | 淘汰低价值内容+分层社区 | 定期内容审计脚本 + 用户权限管理 |
关键原则:
- 去中心化:将维护责任分散至用户群体,避免依赖个人。
- 轻量化:用自动化工具替代人工流程,减少重复劳动。
- 透明化:通过更新日志和社区公示,建立用户信任。
即使没有专职维护人员,通过上述方法,仍可实现免费课程的可持续改进和用户满意度提升。
根据您提供的信息,这是一个关于在蓝桥云课平台上恢复和运行CoppeliaSim仿真环境及ROS相关项目的指南。以下是对内容的整理和补充说明:
CoppeliaSim 蓝桥云课版恢复指南
1. 克隆项目
bash
git clone https://gitcode.com/ZhangRelay1/CoppeliaSim_lanqiaoros.git |
- 特点:国内仓库,下载速度快,3分钟内可完成。
2. 启动仿真环境
bash
cd CoppeliaSim_lanqiaoros # 进入克隆的目录 | |
./coppeliaSim.sh # 启动CoppeliaSim |
- 常见问题:需在项目根目录下执行启动脚本,否则会报错。
案例测试
案例1:巡线(Linetracer)
- 直接运行
linetracer相关脚本即可。
案例2:搬运(YouBot)
- 使用
youbot相关功能包测试机械臂搬运场景。
案例3:ROS 集成
- 启动ROS核心:
bashroscore - 再启动CoppeliaSim,确保ROS接口正常通信。
- 测试ROS案例:使用
rosInterface示例验证功能。
无人机Ego Planner项目
1. 克隆项目
bash
git clone https://gitcode.com/ZhangRelay1/ego_lanqiaoros.git |
2. 安装依赖
bash
sudo apt-get install libarmadillo-dev # 线性代数库 | |
sudo apt install libvtk6-dev # VTK图形库 | |
sudo apt install ros-kinetic-pcl-conversions # PCL转换工具 | |
sudo apt install ros-kinetic-cv-bridge # OpenCV桥接 | |
sudo apt install ros-kinetic-pcl-ros # PCL ROS支持 |
3. 编译项目
bash
cd ego_lanqiaoros/catkin_ws | |
catkin_make -j1 -l1 # 限制编译线程避免内存不足 |
- 关键参数:
-j1 -l1防止因资源不足导致编译失败。
4. 运行测试
- 单机模式:
bashroslaunch ego_planner simple_single.launch - 多机模式:需额外配置(未提供具体步骤)。
注意事项
- 免费资源限制:蓝桥云课为免费平台,可能遇到卡顿(如幻灯片般体验),需谅解。
- ROS版本兼容性:项目基于ROS Kinetic,若使用其他版本需调整依赖。
- 编译问题:大型功能包建议使用
-j1逐线程编译,减少报错。
总结
- 适用场景:快速测试CoppeliaSim与ROS的基础功能(巡线、搬运、无人机规划)。
- 局限性:免费环境性能有限,复杂场景可能卡顿。
如有具体报错或深入需求,可进一步提供日志或描述问题细节!



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











