






 滑模变结构控制是一种非线性控制策略,通过动态调整系统结构实现快速响应和抗扰动。文章详细介绍了滑动模态的概念,涉及超曲面、终止点、李雅普诺夫函数和趋近律等关键要素。
滑模变结构控制是一种非线性控制策略,通过动态调整系统结构实现快速响应和抗扰动。文章详细介绍了滑动模态的概念,涉及超曲面、终止点、李雅普诺夫函数和趋近律等关键要素。
滑模变结构控制本质上是一类特殊的非线性控制,其非线性表现为控制的不连续性,这种控制策略与其它控制的不同之处在于系统的"结构"并不固定,而是可以不断变化,该策略迫使系统按照预定状态轨迹在切换面附近做小幅度、高频率的上下运动,即"滑动模态",这种滑动模态是可以进行设计的且与对象参数及扰动无关,这就使得变结构控制具有快速响应、对参数变化及扰动不敏感、无需系统在线辩识,物理实现简单等优点。但该控制策略的缺点在于当状态轨迹到达滑模面后,会在滑模面两侧来回穿越,从而产生颤动。
滑动模态控制的概念和特性如下:
1.滑动模态定义及数学表达
考虑一般的情况,在系统
![]()
的状态空间中,有一个超曲面s(x)=s(x1,x2,…,xn)=0,如图1.1所示。
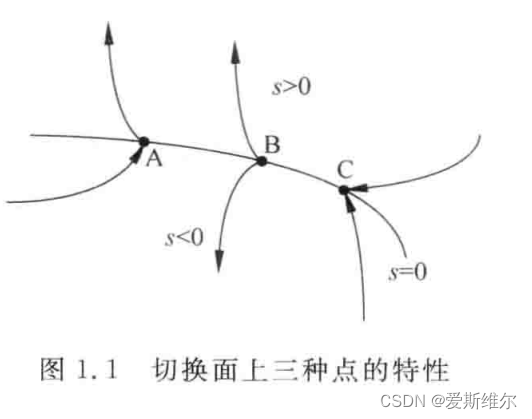
由图可知,在滑模变结构中,A点与B点无多大意义,而终止点C却有特殊的含义,因为如果在切换面上某一区域内所有的点都是终止点,则一旦运动点趋近于该区域时,就被“吸引”在该区域内运动。此时,就称在切换面s=0上所有的运动点都是终止点的区域为“滑动模态区”,或简称为“滑模”区。系统在滑模区中的运动就称为“滑模运动”。
按照滑动模态区上的运动点都必须是终止点这一要求,当运动点到达切换面s(x)=0附近时,必有
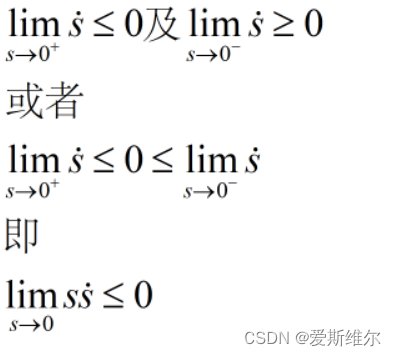
上式可以这么理解:若s在切换面s=0上方即s>0时,s的导数<0,可迫使s向s=0的方向运动;若s在切换面s=0下方即s<0时,s的导数>0,可迫使s向s=0的方向运动。
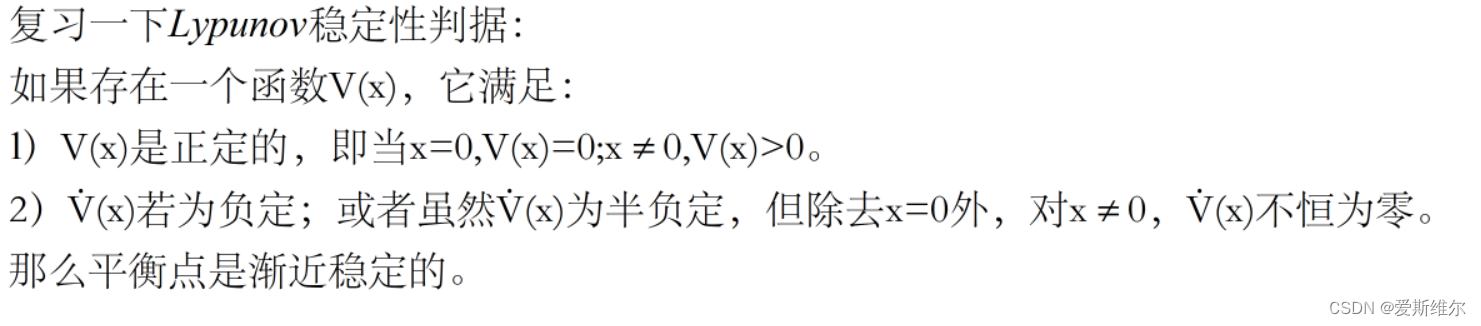
引入李雅普诺夫函数如下:

由上式不难知,李雅普诺夫函数V(x)满足李雅普诺夫稳定性判据,平衡点s渐近稳定,即最终s=0。
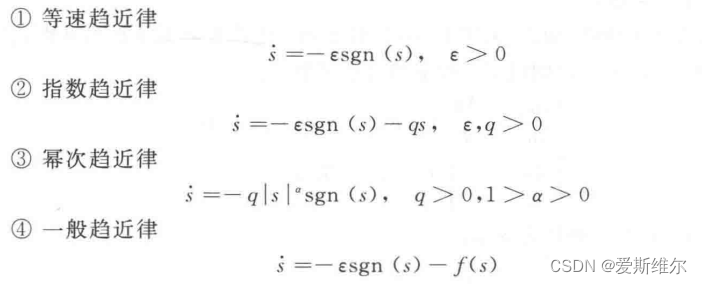
但是每次设计总不能都用李雅普诺夫函数判断,于是人们就提出了趋近律这一概念,常用的趋近律有如下几种:
2.滑模变结构控制的定义

3.滑模面的参数设计


















 1015
1015

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











