







 本文介绍了ROS中的日志管理工具rqt_console和rqt_logger_level,以及如何通过roslaunch启动launch文件。内容包括设置节点日志级别,启动小海龟示例,理解launch文件的结构和作用,以及通过roslaunch启动多个节点并观察它们之间的交互。
本文介绍了ROS中的日志管理工具rqt_console和rqt_logger_level,以及如何通过roslaunch启动launch文件。内容包括设置节点日志级别,启动小海龟示例,理解launch文件的结构和作用,以及通过roslaunch启动多个节点并观察它们之间的交互。
一、准备
确保你已经安装了rqt和turtlesim包,没有的话,使用以下命令安装:
sudo apt-get install ros-<distro>-rqt ros-<distro>-rqt-common-plugins ros-<distro>-turtlesim请用你所使用的版本(比如indigo、jade)代替<distro>。
二、使用rqt_console and rqt_logger_level命令
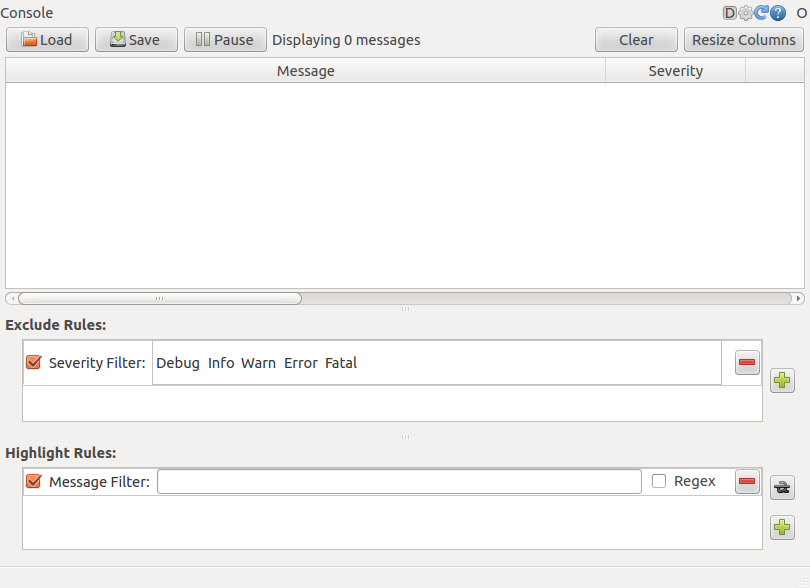
rqt_console连接着ROS的日志框架,可以查看节点的输出 rqt_logger_level 则可以调整节点输出信息的详细级别(DEBUG, WARN, INFO, and ERROR)。
现在我们使用rqt_console查看小海龟节点的日志输出,使用rqt_logger_level调整日志输出级别。
在启动小海龟之前,先在两个终端分别启用两条命令:
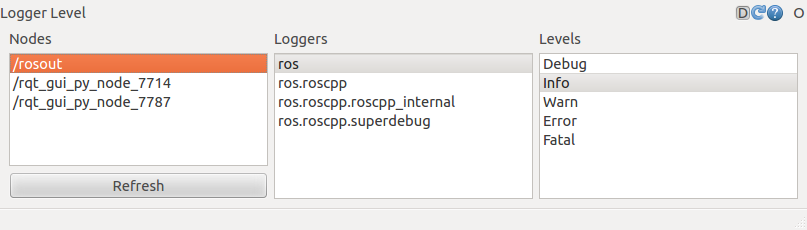
rosrun rqt_console rqt_consolerosrun rqt_logger_level rqt_logger_level你将看到:
和:
然后我们启动小海龟:
rosrun turtlesim turtlesim_node图形界面的操作很简单,不再细说,放个链接:ROS wiki。
1、信息优先级
各种级别的优先级由上到下越来越低:
Fatal
Error
Warn
Info
Debug现
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 772
772

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









